

Промышленные регуляторы
В промышленности для управления техническими устройствами и процессами используются серийные регуляторы. Широкое распространение получили регуляторы температуры для различных нагревательных объектов, регуляторы расхода газов и жидкостей, регуляторы давления и другие.
Несмотря на разнообразие принципов действия, вида используемой энергии, объектов регулирования и конструкций регуляторов, в их основе лежат единые основные законы регулирования. С точки зрения теории автоматического управления структура автоматической системы может быть представлена состоящей из регулятора Ри объекта управленияО(рис. 57).
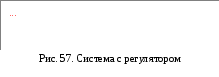
В замкнутой системе автоматического управления регулятор сравнивает текущее значение управляемой величины с её заданным на данный момент времени значением, определяет ошибку и по величине ошибки определяет управляющее воздействие на объект управления, необходимое для устранения ошибки:
![]() – ошибка в системе (отклонение управляемой
величины),
– ошибка в системе (отклонение управляемой
величины),
![]() – управляющее воздействие на объект,
– управляющее воздействие на объект,
где A– оператор регулятора, определяющий связь между ошибкой и управляющим воздействием.
Оператор регулятора определяет закон регулированияи характеризует логику вычисления управляющего воздействия регулятором. В зависимости от выбранного закона регулирования обеспечивается разный результат управления. С точки зрения используемых законов регулирования промышленные регуляторы могут быть разделены на описанные ниже типы.
П-регулятор
Пропорциональный регулятор, для которого управляющее воздействие определяется как величина, пропорциональная ошибке:
![]() ,
,
где kп – коэффициент усиления пропорционального регулятора.
Пропорциональный регулятор реализует пропорциональный закон регулирования. Передаточная функция пропорционального регулятора равна его коэффициенту усиления:
![]() ,
,
следовательно, в структуре системы пропорциональный регулятор представляется усилительным типовым звеном.
При наличии пропорционального регулятора система автоматического управления будет статической и системе присуща статическая ошибка
![]() ,
,
где
![]() – статический коэффициент усиления
системы;ko– коэффициент усиления объекта.
– статический коэффициент усиления
системы;ko– коэффициент усиления объекта.
И-регулятор
Интегральный регулятор, реализующий интегральный закон регулирования, для которого скорость изменения управляющего воздействия пропорциональна ошибке системы:
![]() ,
,
где kи– коэффициент усиления интегрального регулятора. Если перейти к управляющему воздействию, то получим интегральную зависимость между ошибкой системы и управляющим воздействием регулятора:
 .
.
Передаточная функция интегрального регулятора
![]() ,
,
где Tи–
постоянная времени (постоянная
интегрирования) регулятора,![]() .
.
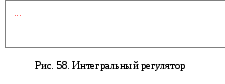
Интегральный регулятор в структуре САУ
представляется типовым интегрирующим
звеном (рис. 58). Система с интегральным
регулятором получается астатической.
При этом в системе отсутствует статическая
ошибка (![]() ),
что обуславливает более высокую точность
управления интегрального регулятора
по сравнению с пропорциональным
регулятором. В системе с интегральным
регулятором заданное значение управляемой
величины устанавливается точно.
),
что обуславливает более высокую точность
управления интегрального регулятора
по сравнению с пропорциональным
регулятором. В системе с интегральным
регулятором заданное значение управляемой
величины устанавливается точно.
В момент возникновения ошибки управляющее воздействие регулятора равно нулю, и требуется некоторое время на интегрирование сигнала ошибки, чтобы управляющее воздействие достигло заметной величины, что снижает быстродействие регулятора.
Пока в системе с интегральным регулятором есть ошибка, управляющее воздействие регулятора будет возрастать. Постоянство управляющего воздействия будет наблюдаться только при отсутствии ошибки в системе. Это обстоятельство приводит к тому, что любая ошибка в системе с течением времени будет устранена и система придёт в заданное состояние.
ПИ-регулятор
Пропорционально-интегральный регулятор (изодромный регулятор) реализует пропорционально-интегральный закон регулирования, когда управляющее воздействие на выходе регулятора содержит две составляющие: пропорциональную величине ошибки и пропорциональную интегралу от ошибки:
 ,
,
где kп– коэффициент усиления пропорционального канала регулятора;kи– коэффициент усиления интегрального канала регулятора.
Передаточная функция ПИ-регулятора
![]() ,
где
,
где
![]() – постоянная времени
ПИ-регулятора.
ПИ-регулятор может быть представлен в
структуре системы как параллельное
соединение пропорционального канала
регулирования и интегрального канала
регулирования.
– постоянная времени
ПИ-регулятора.
ПИ-регулятор может быть представлен в
структуре системы как параллельное
соединение пропорционального канала
регулирования и интегрального канала
регулирования.
Передаточная функция разомкнутой системы автоматического управления с ПИ-регулятором
![]() .
.
Система в этом случае астатическая и
статическая ошибка системы с
ПИ-регулятором
равна нулю (![]() ).
).
ПИ-регулятор обладает свойствами форсирующего звена первого порядка, что обуславливает его повышенное быстродействие по сравнению с пропорциональным регулятором. При управлении от ПИ-регулятора инерционным объектом регулятор может компенсировать инерционные свойства объекта и существенно повысить быстродействие системы автоматического управления.
На начальном этапе управления при большой ошибке работает в основном пропорциональный канал, устраняя ошибку до величины статической ошибки пропорционального канала. Эта малая величина ошибки устраняется за счет работы интегрального канала регулирования.
ПИД-регулятор
Пропорционально-интегрально-дифференциальный регулятор реализует пропорционально-интегрально-дифференциальный закон регулирования. Уп-равляющее воздействие при этом формируется из трёх составляющих:
 ,
,
где kд– коэффициент усиления дифференциального канала регулятора. По сравнению с ПИ-регулятором добавляется составляющая, пропорциональная скорости изменения ошибки в системе.
Передаточная функция ПИД-регулятора может быть представлена как сумма передаточных функций усилительного, интегрирующего и дифференцирующего звеньев:
![]() ,
,
где
![]() – первая постоянная времени регулятора;
– первая постоянная времени регулятора;![]() – вторая постоянная времени регулятора.
Структура системы с ПИД-регулятором
показана на рис. 59. Регулятор состоит
из трёх каналов регулирования:
дифференциального, интегрального и
пропорционального.
– вторая постоянная времени регулятора.
Структура системы с ПИД-регулятором
показана на рис. 59. Регулятор состоит
из трёх каналов регулирования:
дифференциального, интегрального и
пропорционального.
Как видно из передаточной функции, ПИД-регулятор обладает свойствами форсирующего звена второго порядка. При управлении от ПИД-регулятора колебательным объектом второго порядка регулятор может компенсировать колебательные свойства объекта управления и обеспечить плавные апериодические процессы в системе. При наличии в системе ПИД-регулятора система становится астатической и статическая ошибка системы равна нулю.
При настройке ПИД-регулятора устанавливаются
значения коэффициентов усиления каналов
регулятора. Если какой-либо из коэффициентов
принять равным нулю при настройке, то
соответствующая составляющая управляющего
воздействия исчезнет и регулятор
превратится в более простой. Например,
если принять
![]() ,
то ПИД-регулятор превратится в
ПИ-регулятор. Поэтому ПИД-закон
регулирования рассматривается как
общий закон, из которого настройкой
можно получить более простые законы
регулирования.
,
то ПИД-регулятор превратится в
ПИ-регулятор. Поэтому ПИД-закон
регулирования рассматривается как
общий закон, из которого настройкой
можно получить более простые законы
регулирования.
ПД-регулятор
Пропорционально-дифференциальный регулятор реализует пропорционально-дифференциальный закон регулирования. Управляющее воздействие регулятора складывается из двух составляющих: составляющей, пропорциональной ошибке, и составляющей, пропорциональной скорости изменения ошибки:
![]() .
.
Передаточная функция ПД-регулятора
![]() ,
где
,
где![]() – постоянная времени регулятора.
– постоянная времени регулятора.
ПД-регулятор обладает свойствами форсирующего звена первого порядка и может быть представлен в структуре системы как параллельное соединение пропорционального и дифференциального каналов управления.
При использовании ПД-регулятора степень астатизма системы будет определяться объектом управления. Если объект управления не является астатическим, то система управления будет статической и ей будет присуща статическая ошибка.