

Типовые воздействия
Процессы в системе автоматического управления возникают под влиянием внешних воздействий на систему. Внешними воздействиями явлются управляющие воздействия (или возмущения). В реальных условиях внешние воздействия могут иметь произвольный характер и выражаться произвольными функциями времени, как детерминированными, так и статистическими. Поскольку в этом случае задача исследования становится неопределенной, то при анализе систем автоматического управления используют ряд типовых воздействий, которые позволяют наиболее полно выявить динамические свойства исследуемой системы и в то же время наиболее близки к реальным внешним воздействиям.
В теории автоматического управления используются следующие типовые воздействия при изучении переходных процессов в системе.
1. Ступенчатая функция(скачкообразное воздействие)
График ступенчатой функции приведен на рис. 14. В нулевой момент времени воздействие скачком изменяется от нуля до некоторой постоянной величины. Аналитическое выражение для ступенчатой функции
![]()

П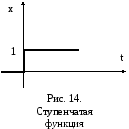 ри
значении функции, равном единице (рис.
14), функция называетсяединичной
ступенчатой функцией. Единичную
функцию обозначают
ри
значении функции, равном единице (рис.
14), функция называетсяединичной
ступенчатой функцией. Единичную
функцию обозначают
x(t) = 1(t) = [1].
Если амплитуда ступенчатой функции отличается от единицы и равна некоторой величине А, то такая функция является неединичной и обозначается
x(t) = A[1].
Изображения Лапласа для ступенчатой функции
![]() и
и![]() .
.
Единичная импульсная функция, илидельта-функция
Э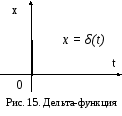 та
функция представляет собой производную
от единичной ступенчатой функции
та
функция представляет собой производную
от единичной ступенчатой функции![]() .
.
Дельта-функция равна нулю повсюду, кроме точки t = 0, где она стремится к бесконечности (рис. 15).
Основное свойство дельта-функции
![]() ,
,
т.е. её график имеет единичную площадь.
Размерность единичной дельта-функции [сек–1]. Дельта-функцию можно рассматривать как предел прямоугольного импульса при стремлении его длительности к нулю, а амплитуды – к бесконечности. С помощью импульсной функции удобно моделировать ударные воздействия на систему (кратковременные воздействия – удары).
Гармоническая функция
Ф ункция,
изменяющаяся по гармоническому закону
(закону синуса или косинуса), рис. 16.
ункция,
изменяющаяся по гармоническому закону
(закону синуса или косинуса), рис. 16.
![]() или
или![]() .
.
В теории автоматического управления гармоническую функцию часто записывают с использованием формулы Эйлера
![]() .
.
Гармоническая функция применяется при исследовании частотных свойств элементов и систем автоматического управления. С её помощью моделируются повторяющиеся периодические воздействия (например, вибрации).
Степенные функции времени
В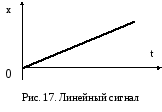 ыражают
линейное, квадратичное и т.д. изменение
входной величины во времени:
ыражают
линейное, квадратичное и т.д. изменение
входной величины во времени:
![]() ,
,
где k– постоянный коэффициент;– константа.
При =1 обеспечивается линейная функция времени, график которой приведен на рис. 17.
Степенные функции применяются в том случае, когда необходимо смоделировать непрерывное изменение воздействия на систему, например при исследовании следящих систем.
Временные характеристики системы автоматического управления
Временная характеристика представляет собой переходный процесс на выходе системы автоматического управления, возникающий при подаче на вход системы внешнего воздействия. Различают два вида временных характеристик.
Первая временная характеристика получила название переходной характеристикии представляет собой процесс в системе при воздействии на вход системы ступенчатой функции
![]() или
или![]() .
.
Переходная характеристика является функцией времени и определяется только динамическими свойствами системы
![]() .
.
В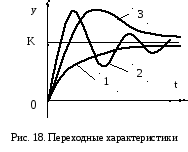 обыкновенных линейных системах можно
наблюдать три основных вида переходных
характеристик (рис. 18).
обыкновенных линейных системах можно
наблюдать три основных вида переходных
характеристик (рис. 18).
Апериодические (монотонные). Первая производная выходной величины не меняет знака.
Колебательные периодические. Первая производная выходной величины меняет знак бесконечное число раз.
Апериодические колебательные. Первая производная выходной величины меняет свой знак, но отсутствует периодичность смены знака производной и число экстремумов ограничено.
Вид переходной характеристики определяется динамическими свойствами системы или ее элемента. Поэтому при анализе системы автоматического управления обычно стремятся определить её переходную характеристику для оценки свойств системы.
Вторая временная характеристика описывает реакцию (отклик) системы на входное воздействие, описываемое единичной импульсной дельта-функцией. Воздействие дельта-функции выводит систему из состояния равновесия, и дальнейшее поведение системы определяется её собственными свойствами, поскольку внешнее воздействие прекращается ((t) ≡ 0приt > 0). Эта временная характеристика получила названиефункции веса.
Изображение Лапласа единичной импульсной функции X(p) = L{ (t)} = 1, тогда изображение для функции веса
![]() .
.
Сама весовая функция (функция времени) определится как
![]() .
.
Весовая функция описывает процесс в системе, возникающий при подаче на вход системы сигнала в виде единичной импульсной функции, и выражается оригиналом передаточной функции системы. Таким образом, вид весовой функции полностью определяется свойствами системы.
Поскольку изображение Лапласа для
процесса в системе
![]() ,
то сам процесс в системе можно выразить
через весовую функцию системы, используя
свойство умножения изображений для
преобразования Лапласа
,
то сам процесс в системе можно выразить
через весовую функцию системы, используя
свойство умножения изображений для
преобразования Лапласа
![]() .
.
Полученная формула позволяет непосредственно описывать переходный процесс в системе при любом входном воздействии по известной функции веса системы. Поскольку весовая функция однозначно определяется передаточной функцией системы, то и характер процесса, описываемого весовой функцией, для обыкновенной линейной системы будет соответствовать переходной характеристике системы.