

Прямые методы анализа качества системы Аналитическое решение дифференциального уравнения
Прямые методы оценки качества системы автоматического управления основаны на получении тем или иным путём графика переходной характеристики системы с последующей оценкой качества переходного процесса по графику. Переходная характеристика может быть получена путем решения дифференциального уравнения системы автоматического управления или путем моделирования работы системы физическими методами.
Переходная характеристика системы при
аналитическом решении получается в
результате решения дифференциального
уравнения замкнутой системы.
Дифференциальное уравнение решается
при входном воздействии в виде единичной
ступенчатой функции
![]() .
Полученное решение при этом описывает
переходную характеристику системы.
.
Полученное решение при этом описывает
переходную характеристику системы.
Замкнутая система автоматического управления описывается передаточной функцией замкнутой системы
 .
.
Из выражения передаточной функции можно получить дифференциальное уравнение системы в операторной записи
![]() .
.
При исследовании качества системы необходимо получить переходный процесс при единичном ступенчатом входном воздействии
![]() ,
,
в этом случае уравнение системы примет вид
![]() .
.
Решение дифференциального уравнения
в виде функции
![]() описывает переходную характеристику
системы. Полное решение
описывает переходную характеристику
системы. Полное решение![]() складывается из общего решения однородного
уравнения без правой части
складывается из общего решения однородного
уравнения без правой части
![]()
и частного (или вынужденного) решения, определяемого правой частью дифференциального уравнения:
![]() .
.
Общее решение однородного обыкновенного линейного дифференциального уравнения порядка nимеет вид
![]() ,
,
где
![]() –
корни характеристического уравнения
–
корни характеристического уравнения![]() ;
;![]() – постоянные интегрирования, определяемые
из начальных условий.
– постоянные интегрирования, определяемые
из начальных условий.
После получения решения
![]() строится по точкам график этой функции,
который и будет графиком переходной
характеристики системы. Показатели
качества системы устанавливаются по
виду графика
строится по точкам график этой функции,
который и будет графиком переходной
характеристики системы. Показатели
качества системы устанавливаются по
виду графика![]() .
При этом используются рассмотренные
выше оценки качества переходного
процесса в системе.
.
При этом используются рассмотренные
выше оценки качества переходного
процесса в системе.
Численное решение дифференциального уравнения
Использование ЭВМ сделало эффективным
решение дифференциального уравнения
численными методами. Дифференциальное
уравнение переходной характеристики
записывается на основе передаточной
функции замкнутой системы
![]() и имеет следующий вид:
и имеет следующий вид:![]() .
.
Полученному уравнению соответствует структура, показанная на рис. 49а. Однако при наличии в системе дифференцирования сигнала ступенчатая функция 1(t) в моментt=0подвергается дифференцированию, что в ряде случаев ведет к ошибке вычисления. Чтобы обойти эту трудность, структуру целесообразно изменить в соответствии с рис. 49б.
Н овая
структура эквивалентна предыдущей,
однако свободна от ее недостатка,
поскольку в этом случае ступенчатая
функция вначале преобразуется
инерционными, колебательными и
интегрирующими звеньями, замедляющими
скорость изменения сигнала приt=0.
овая
структура эквивалентна предыдущей,
однако свободна от ее недостатка,
поскольку в этом случае ступенчатая
функция вначале преобразуется
инерционными, колебательными и
интегрирующими звеньями, замедляющими
скорость изменения сигнала приt=0.
Новой структуре соответствует система уравнений

При этом первое уравнение является дифференциальным, а второе – алгебраическим, т.к. содержит производные, находимые из первого уравнения. Полученная система уравнений может быть составлена непосредственно на основе передаточной функции системы.
При численном решении дифференциального уравнения уравнение вида
![]() с начальными условиями
с начальными условиями![]() ,
,![]()
можно представить как
![]() или
или ,
,
откуда
 .
.
Аналитическим решением уравнения
является функция
![]() .
Решить уравнение численным методом –
это значит, для заданной последовательности
аргументов
.
Решить уравнение численным методом –
это значит, для заданной последовательности
аргументов![]() и начального значения
и начального значения![]() без определения
без определения![]() найти такие значения
найти такие значения![]() ,
что
,
что![]() ,
,![]() и
и![]() .
.
В результате получим таблицу решений
исходного дифференциального уравнения
для заданной последовательности значений
аргумента. Величина
![]() – шаг интегрирования.
– шаг интегрирования.
Для нахождения переходной характеристики необходимо решить дифференциальное уравнение порядка n
![]() .
.
Для численного решения это уравнение
следует преобразовать в систему уравнений
первого порядка, записанных в нормальной
форме Коши, что обеспечивается выполнением
подстановок
![]() ,
,![]() ,
,![]() … . В результате этих подстановок и с
учётом связей между новыми переменными
получим систему дифференциальных
уравнений первого порядка
… . В результате этих подстановок и с
учётом связей между новыми переменными
получим систему дифференциальных
уравнений первого порядка
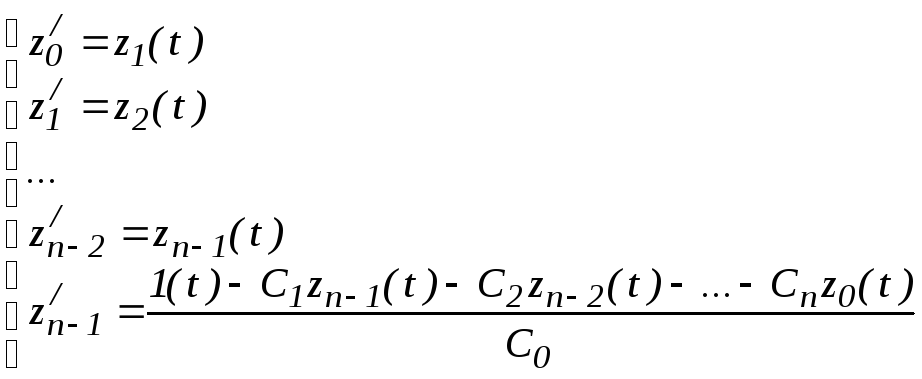 ,решение
которой тем или иным численным методом
на ЭВМ позволит получить таблицу значений
величинz0(t),
z1(t),
z2(t)…
Решение для уравнения переходного
процесса (переходная характеристика
системы) находится через эти переменные:
,решение
которой тем или иным численным методом
на ЭВМ позволит получить таблицу значений
величинz0(t),
z1(t),
z2(t)…
Решение для уравнения переходного
процесса (переходная характеристика
системы) находится через эти переменные:
![]() .
.
При численном решении дифференциального уравнения переходной характеристики необходимо указывать начальные условия для исследуемой системы, а также определять допустимую погрешность решения, шаг интегрирования и пределы интегрирования.
При использовании ЭВМ и математического программного обеспечения численный метод оказывается наиболее простым методом.