

Преобразования структурных схем
При рассмотрении структурной схемы системы не всегда в её составе удаётся выделить в чистом виде одно из рассмотренных выше соединений. В этом случае возникает необходимость преобразования структурной схемы к такому виду, чтобы её можно было бы представить типовыми соединениями звеньев. Естественно, что при таком преобразовании сигналы в преобразованной структуре не должны измениться.
Преобразование структурных схем сводится либо к переносу точки соединения двух звеньев, либо к переносу внешнего воздействия (сумматора, к которому подводится внешнее воздействие). Для сохранения адекватности преобразованной схемы необходимо выполнять при преобразовании следующие правила.
Внешнее воздействие можно перенести со входа звена на его выход, добавив между воздействием и точкой приложения фиктивное звено с передаточной функцией исходного звена.
П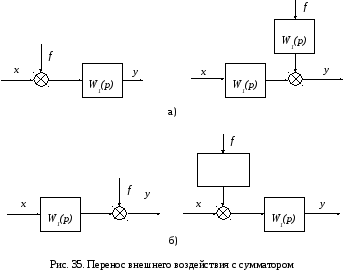 ример
показан на рис. 35а. Внешнее воздействиеf вместе с сумматором
переносится со входа звена
ример
показан на рис. 35а. Внешнее воздействиеf вместе с сумматором
переносится со входа звена![]() на выход этого звена. Чтобы сигналы в
преобразованной схеме не изменились,
при преобразовании добавляется фиктивное
звено с передаточной функцией
на выход этого звена. Чтобы сигналы в
преобразованной схеме не изменились,
при преобразовании добавляется фиктивное
звено с передаточной функцией![]() .
Слева на рис. 35 показана исходная
структура, справа – преобразованная.
.
Слева на рис. 35 показана исходная
структура, справа – преобразованная.
Для исходной структуры
![]() ,
для преобразованной −
,
для преобразованной −![]() ,
т.е. с точки зрения выходного сигнала
обе схемы адекватны.
,
т.е. с точки зрения выходного сигнала
обе схемы адекватны.
Внешнее воздействие можно перенести с выхода звена на его вход, добавив между воздействием и новой точкой его приложения фиктивное звено с передаточной функцией, обратной передаточной функции и исходного звена.
На рис. 35б внешнее воздействие fвместе с сумматором переносится с выхода
звена![]() (левая структурная схема) на его вход
(правая схема). Для обеспечения адекватности
преобразованной схемы в её структуру
добавлено фиктивное звено с передаточной
функцией
(левая структурная схема) на его вход
(правая схема). Для обеспечения адекватности
преобразованной схемы в её структуру
добавлено фиктивное звено с передаточной
функцией![]() .
Легко убедиться в одинаковости выходной
величины
.
Легко убедиться в одинаковости выходной
величины![]() в обеих схемах.
в обеих схемах.
Т
 очку
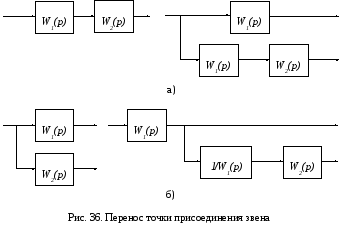
присоединения звена 2 можно перенести
с выхода звена 1 на его вход, добавив
между новой точкой присоединения звена
2 и входом звена фиктивное звено с
передаточной функцией
очку
присоединения звена 2 можно перенести
с выхода звена 1 на его вход, добавив
между новой точкой присоединения звена
2 и входом звена фиктивное звено с
передаточной функцией .
.
На рис. 36а звено
![]() присоединено к выходу звена
присоединено к выходу звена![]() (левая схема). Точка присоединения звена
(левая схема). Точка присоединения звена![]() переносится на вход звена
переносится на вход звена![]() (правая схема). Для сохранения сигналов
в преобразованную схему добавлено
фиктивное звено.
(правая схема). Для сохранения сигналов
в преобразованную схему добавлено
фиктивное звено.
Точку присоединения звена 2 можно перенести со входа звена 1 на его выход, добавив между новой точкой присоединения звена 2 и его входом фиктивное звено с передаточной функцией, обратной передаточной функции первого звена.
Это правило поясняется рис. 35б. В исходной
структуре звено
![]() присоединено ко входу звена
присоединено ко входу звена![]() .
В преобразованной структуре точка
присоединения перенесена на выход звена
.
В преобразованной структуре точка
присоединения перенесена на выход звена![]() .
Добавление фиктивного звена позволяет
сохранить сигналы в системе неизменными.
.
Добавление фиктивного звена позволяет
сохранить сигналы в системе неизменными.
Передаточная функция замкнутой системы автоматического управления
В y(t)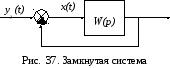
Свойства замкнутой системы автоматического управления описывает передаточная функция замкнутой системы
![]() .
.
Для структуры на рис. 37 общая передаточная функция может быть найдена с использованием правила нахождения передаточной функции соединения звеньев с обратной связью
![]() ,
,
где W(p) –передаточная функция разомкнутой системы.
Передаточная функция замкнутой системы иногда называется в литературе главным оператором системы. Передаточная функция замкнутой системы в общем случае является дробной функцией вида
![]() .
.
Поскольку передаточная функция W(p)разомкнутой системы является дробью
![]() ,
то
,
то![]() ,
,![]() .
.
Полином C(p), стоящий в знаменателе выражения передаточной функции замкнутой системы, называетсяхарактеристическим полиномом замкнутой системы. Приравнивание нулю характеристического полинома даётхарактеристическое уравнение замкнутой системы
![]() .
.
Характеристическое уравнение замкнутой системы является алгебраическим уравнением степени n и имеет в общем случаеn корней. Эти корни являютсяполюсами передаточной функциизамкнутой системы. Решение уравнения, полученного приравниванием нулю полинома, стоящего в числителе передаточной функции,
![]()
дает нули передаточной функциизамкнутой системы автоматического управления.
Подстановкой
![]() из передаточной функции замкнутой
системы можно получить частотную
передаточную функцию замкнутой системы
из передаточной функции замкнутой
системы можно получить частотную
передаточную функцию замкнутой системы
 .
.