

6.2. Обоснование размеров элементов поперечного профиля
В необходимых случаях ширина проезжей части может быть обоснована расчетами. Необходимо иметь в виду, что от ширины проезжей части зависит стоимость одной из самых дорогих частей дороги – дорожной одежды. В то же время принятие недостаточной ширины полосы движения уменьшает безопасность движения.
Ширина одной полосы движения зависит от ширины кузова автомобиля b, ширины колеи с и зазоров безопасности, зависящих от скорости движения автомобиля (рис. 6.7):
у – между автомобилем и кромкой проезжей части,
х – между кузовами встречных автомобилей;
D – между кузовами автомобилей, едущих в одном направлении.
Зазоры безопасности х, у, D – могут быть вычислены по формулам, предложенным Н.Ф. Хорошиловым:
![]() ;
;
![]() ;
;
![]()

Рис. 6.7. Схема к определению ширины полосы движения
Ширина полосы движения определяется по формулам:
на однополосной дороге
![]() ;
;
на двухполосной проезжей части (без разделительной полосы)
П =y + (b + c)/2 +x/2;
при четырехполосной дороге (с разделительной полосой)
![]() .
.
При смешанном движении расчет необходимо выполнять для двух вариантов:
легковые автомобили, имеющие небольшие размеры, но требующие больших зазоров безопасности, вследствие высоких скоростей движения;
грузовые автомобили, имеющие большие габариты, но требующие малых зазоров безопасности.
За расчетное значение следует принимать большее из полученных двух значений.
6.3. Определение пропускной способности полосы движения
Под пропускной способностью одной полосы движения понимают предельное количество автомобилей, проезжающих через поперечное сечение полосы движения в единицу времени.
Пропускную способность определяют на основе теории транспортных потоков. Различают следующие теории транспортных потоков:
- теории, основанные на динамических моделях потоков автомобилей, согласно которой автомобили движутся друг за другом без обгона по одной полосе проезжей части;
- теории, основанные на вероятностных моделях, анализирующие движение двух встречных потоков автомобилей с учетом возможности обгонов с заездом на полосу встречного движения.
Движение автомобилей по дороге представляет собой неустановившийся процесс, поэтому может быть охарактеризовано только с позиции теории вероятности. Чем более насыщен транспортный поток, тем меньше в нем различие в скоростях отдельных автомобилей.
Важной характеристикой потока движения является плотность транспортного потока – количество автомобилей, приходящиеся на единицу длины дороги, обычно протяжением 1 км
Q = N/V, авт/км
где N – интенсивность движения, авт/ч;
V – скорость движения, км/ч.
Теории, основанные на вероятностных моделях более сложные, но они точнее учитывают реальные условия движения на дороге.
Как правило, теоретическую пропускную способность полосы движения определяют на основе упрощенной динамической теории транспортного потока. В соответствии с этой теорией приняты условия:
автомобили в транспортном потоке движутся друг за другом без обгона;
скорости всех автомобилей одинаковы и не меняются во время движения;
автомобили движутся на одинаковом постоянном расстоянии друг от друга, достаточном для полного торможения автомобиля при остановке впереди едущего автомобиля.
В соответствии с вышесказанным пропускная способность одной полосы проезжей части определяется по уравнению
![]() авт/ч
авт/ч
где V – расчетная скорость движения потока, км/ч;
L – динамический габарит автомобиля (расстояние, занимаемое движущимся автомобилем на полосе движения) (рис. 6.8)
![]() ,
,
где l1 – путь, пройденный автомобилем за время реакции водителя (t = 1 сек.);
SТ – тормозной путь автомобиля;
lo – статический габарит автомобиля, равный длине автомобиля. принимается равным для легковых автомобилей – 4 – 6 м, грузовых – 6 – 10 м, автобусов – 7 – 10 м, троллейбусов – 9 – 10 м;
l2 – запас пути (5 – 10 м).
тогда
![]() .
.

Рис. 6.8. Динамический габарит автомобиля
Анализ формулы показывает (рис. 6.8), что максимум пропускной способности порядка 1100 – 1600 авт/ч соответствует скорости в интервале 20 – 40 км/ч. Пропускная способность зависит от коэффициента сцепления φ, то есть для одного и того же участка она разная в разное время года (рис. 6.9).
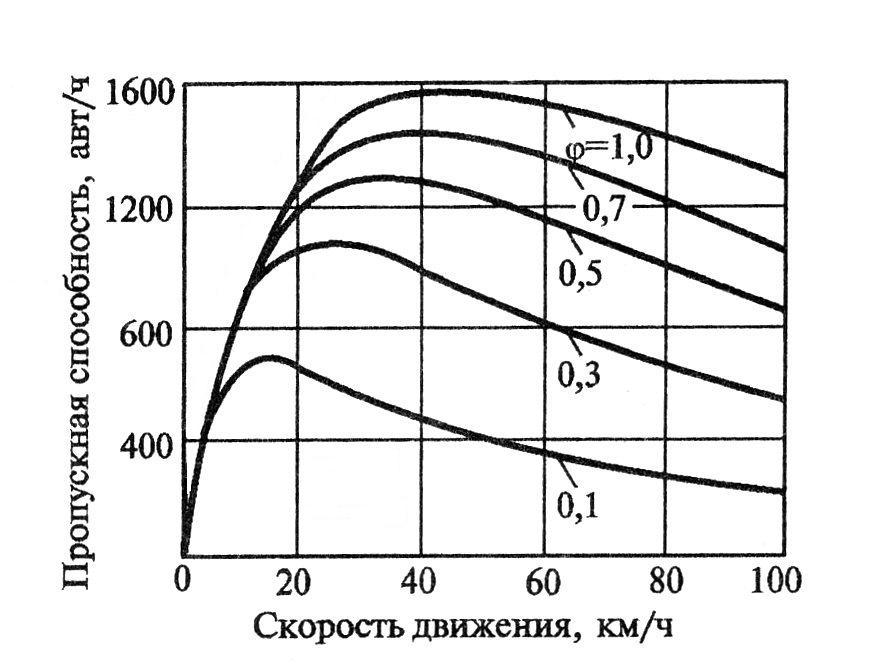
Рис. 6.9. Теоретическая пропускная способность при различных значениях коэффициента сцепления
Фактическая интенсивность движения, как правило, меньше теоретически возможной, поскольку не соблюдается два основных требования расчетной схемы: одинаковая скорость потока и непрерывность движения.
В реальных условиях возможны следующие режимы движения:
Свободный поток – автомобили движутся независимо друг от друга со скоростями, отвечающими их динамическим характеристикам.
Неустойчивый поток – движение быстроходных автомобилей задерживается из-за тихоходных автомобилей. Чтобы двигаться со скоростями, отвечающими их динамическим характеристикам, быстроходные автомобили должны совершать обгоны тихоходных автомобилей. Общая скорость потока с увеличением интенсивности движения уменьшается.
Насыщенный поток – обгоны практически невозможны, скорость потока резко падает, автомобили выстраиваются в колонну и движутся со скоростью самого тихоходного автомобиля.
Существует понятие уровня загрузки, под которым понимают отношение интенсивности движения к пропускной способности
z = N/Р.
Уровни загрузки изменяются от 0,2 – 0,3 – для свободного потока, до 0,7 – 1,0 – в условиях насыщенного потока.
Практически допустимая максимальная интенсивность движения, при которой не возникает ощутимых затруднений в управлении автомобилем и обеспечивается безопасность движения, не должна превышать 0,5 от теоретической пропускной способности.
По СниП [2] пропускная способность одной полосы не должна превышать 3500 авт/сут. Соответственно количество полос движения назначают руководствуясь нормами, приведенными в табл. 6.2.
Таблица 6.2