

3.5. Уширение проезжей части на кривых
При движении автомобиля по криволинейному участку дороги он занимает полосу проезжей части по ширине большую, чем требуется в соответствии с его габаритами в плане. Для того чтобы обеспечить условия движения встречных автомобилей такие же, как на прямолинейном участке, необходимо уширить проезжую часть (рис. 3.11).

Рис. 3.11. Расчетная схема определения уширения на кривой
Из подобия треугольников АВС и ВСD находим что
![]() или
или
![]() ,
,
где l – база автомобиля, м.
Пренебрегая в скобках величиной АС, малой, по сравнению с 2R, получаем, что необходимое уширение одной полосы движения
![]()
Получаемая формула не учитывает возможных отклонений автомобиля от средней траектории при высоких скоростях движения.
Уширение полосы движения с учетом скорости движения рекомендуют определять по эмпирической формуле
![]() .
.
Как видно из приведенной зависимости величина уширения зависит от габаритов автомобиля. При проектировании дороги для движения автопоездов уширение при одних и тех же радиусах кривых требуется значительно большее.
По СНиП [2] уширение проезжей части на дорогах с двухполосной проезжей частью предусматривают при R ≤ 1000 м.
Проезжую часть на кривых в плане уширяют с внутренней стороны за счет обочины, при этом оставшаяся ширина обочины не должна быть меньше 1,5 м для дорог I – II категорий и 1 м – на дорогах остальных категорий.
Участок, в пределах которого осуществляют уширение проезжей части, называют отводом уширения. Отвод уширения, так же, как и отгон виража, располагается в пределах переходной кривой. При этом длина их принимается по большему значению, полученному по расчету (рис. 3.12).

Рис. 3.12. Способы устройства уширения на кривых:
1 – основная (круговая) кривая; AD – отвод уширения; Δ – уширение
В пределах круговой кривой уширение имеет постоянную величину (рис. 3.13).
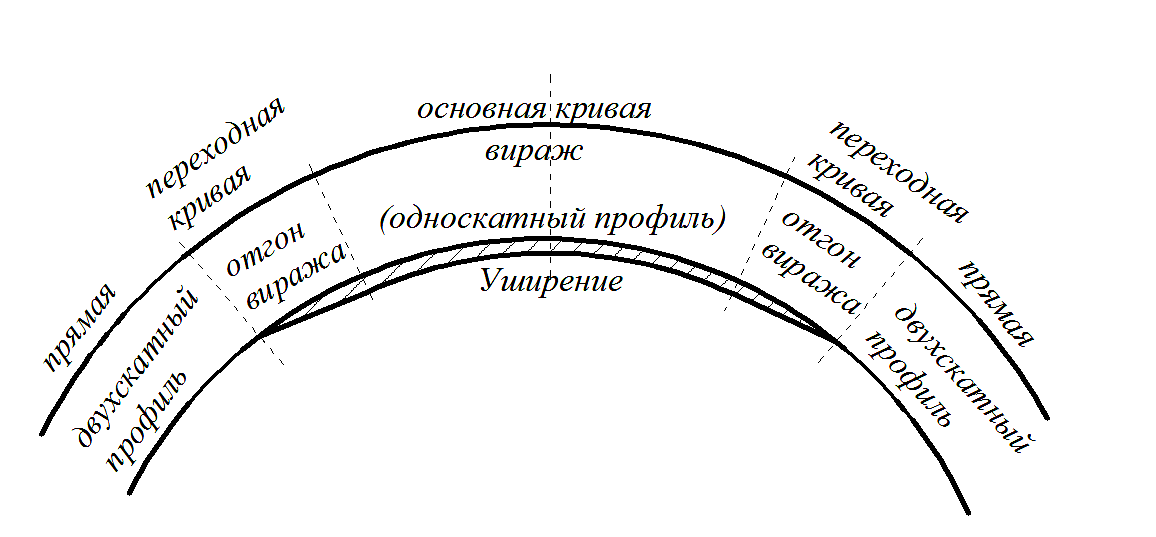
Рис. 3.13. План закругления
Уширение проезжей части в городских условиях также производят при радиусах менее 750 м за счет полос озеленения. Если по оси проезжей части улицы проложены пути трамвая, то уширение следует делать с каждой стороны трамвайных путей.
3.6. Обеспечение видимости. Расчетные схемы видимости
Видимостью дороги называют минимальное необходимое расстояние, на котором водитель должен видеть впереди себя дорогу, с тем, чтобы заметить препятствия, он смог своевременно его избежать. На прямом горизонтальном участке водитель в хорошую солнечную погоду просматривает встречный транспорт на расстояние более 1000 м. Препятствиями для видимости дороги в плане на кривых малого радиуса являются расположенные с внутренней стороны кривой лес, строения или крутой откос выемки.
На переломах продольного профиля видимость может быть не обеспечена на выпуклых переломах при малой величине радиусов выпуклых вертикальных кривых, на вогнутых переломах при освещении дороги фарами ночью при малых радиусах вогнутых кривых. Расстояние видимости должно быть достаточным, чтобы водитель, увидев препятствие, смог остановить машину, не доезжая до него или объехать его.
В соответствии с этим расстояние видимости определяют, исходя из двух принципиально разных предпосылок:
схемы торможения, предусматривающей остановку перед препятствием или встречным автомобилем;
схемы объезда, исходящей из объезда автомобилем препятствия или обгона попутного автомобиля с выездом на смежную полосу встречного движения.
Расстояние видимости по 1–ой схеме обеспечивает безопасность движения, по 2–ой – как безопасность, так и бесперебойность движения.
Рассмотрим вывод расчетных зависимостей (рис. 3.14).
а)

б)

в)

Рис. 3.14. Схемы видимости:
а – схема определения расстояния видимости поверхности дороги Sп;
б – схема определения расстояния видимости встречного автомобиля Sв;
в – схема определения расчетного расстояния видимости при обгоне Sо
Схема – «одиночное торможение»: автомобиль встречает препятствие на той же полосе движения и требуется полная его остановка на безопасном расстоянии от препятствия (рис. 3.14, а).
Этот случай является расчетным для дорог всех категорий и, особенно, для дорог с четко выделенными полосами движения, когда выезд на соседнюю полосу невозможен.
Расчетное расстояние по этой схеме складывается из трех расстояний:
![]() ,
,
где l1 – путь, проходимый автомобилем за время реакции водителя;
ST – путь торможения;
l0 – запас пути.
Время реакции водителя t зависит от условий движения и индивидуальных психологических особенностей водителя. В городских условиях или на горных дорогах водитель ведет автомобиль с повышенным вниманием, в то время, как в однообразной местности его внимание рассеивается. В ряде стран предлагают время реакции принимать дифференцированно. Например, при обгоне t = 0,75 с, поскольку водитель располагает временем для подготовки маневра. При неожиданно возникшем препятствии t = 1,5 с. В Швейцарии на дорогах с разделительной полосой, где невозможно появление пешеходов, принимают t = 2 с, на обычных дорогах t = 1 с. В Англии принимают t = 0,75 с в городских условиях и t = 2,5 сек на загородных дорогах. В РФ время реакции водителя принимают в среднем равным 1 с.
С учетом вышесказанного, пренебрегая величиной коэффициента качения f, получим:
![]()
или выражая V в км/ч
![]()
2. Схема – «двойное торможение»: Автомобиль и встречный автомобиль, едущий по той же полосе движения, должны, увидев друг друга, становиться, не доезжая друг до друга (рис. 3.14, б). Эта схема применима для двухполосных и однополосных дорог (II – V категорий).
Расчетное расстояние видимости по этой схеме складывается из расстояний, которые автомобили проходят за время реакции водителей, тормозных путей автомобилей и расстояния запаса
![]()
Для случая V1 = V2, i1 = i2 причем, один автомобиль движется вверх по уклону, а другой вниз
![]() .
.
Схема – «обгон»: Быстроходный автомобиль обгоняет тихоходный автомобиль с выездом на соседнюю полосу движения до встречи со встречным автомобилем (рис. 3.14, в). Эта схема приемлема для дорог без разделительной полосы.
В начальный момент времени расстояние между обгоняющим и обгоняемым автомобилем равно разности их тормозных путей плюс путь, проходящий обгоняющим автомобилем за время реакции водителя
![]()
Путь обгона рассматривается как состоящий из трех путей:
L = L1 + L2 + L3.
Участок L1 – обгоняющий автомобиль, выехав на смежную полосу движения, поравнялся с обгоняемым автомобилем. Это расстояние зависит от разности скоростей идущих автомобилей
![]()
Участок L2 – обгоняющий автомобиль, возвращается на свою полосу движения, причем между обгоняющим и обгоняемым автомобилем расстояние должно равняться тормозному пути второго автомобиля с некоторым запасом
![]() .
.
Тогда
![]() .
.
Участок L3 – путь, проходящий за это время встречным автомобилем
![]()
Расстояния видимости нормируется ГОСТом [3] в зависимости от скорости движения одиночного легкового автомобиля.
Минимальные расстояния видимости нормируются в зависимости от расчетной скорости (табл. 3.2).
Таблица 3.2