

Нормативные значения расстояний видимости по госТу [3]
|
V, км/ч |
140 |
120 |
100 |
80 |
60 |
50 |
40 |
30 |
|
Sп, м |
275 |
250 |
200 |
150 |
85 |
75 |
55 |
45 |
|
Sв, м |
- |
450 |
350 |
250 |
170 |
130 |
110 |
90 |
Расстояние видимости по схеме «обгон» нормативными документами не нормируется. Расчеты показывают, что оно должно быть более 700 м. Дорога считается хорошо запроектированной, если обгоны возможны на участках, составляющих более 2/3 ее длины.
Необходимость в обеспечении боковой видимости возникает в городских условиях, при пересечениях с железными и автомобильными дорогами в одном уровне, в местах, где возможен переход дороги людьми и животными.
Необходимое расстояние боковой видимости (рис. 3.15)
![]()
где S – тормозной путь
Vп, Va – соответственно скорость пешехода и автомобиля.

Рис. 3.15. Схема к определению расстояния боковой видимости
Для бегущего человека Vn может быть принята 10 км/час.
По СНиП [2] для дорог I – III категорий Lб = 25 м, для дорог I – V категорий Lб = 15 м.
3.7. Обеспечение видимости на кривых в плане
Видимость на кривой в плане обеспечена, если автомобиль находящийся в точке А, видит автомобиль, находящийся в точке В на расстоянии, равном расчетному расстоянию видимости для данной категории дороги (рис. 3.16).

Рис. 3.16. Обеспечение видимости на кривой в плане
Луч зрения, равный расстоянию видимости по одной из приведенных выше схем, является границей площади, внутри которой не должно быть препятствий, мешающих видимости. Обеспечение видимости на кривых в плане проверяют для автомобилей, движущихся по крайней внутренней полосе движения. Принимают, что глаз водителя расположен в 1,5 м от внутренней кромки проезжей части на высоте 1,2 м. Это соответствует положению водителя легкового автомобиля.
Разработан графический метод определения границы срезки препятствий – в зоне видимости (рис. 3.17).

Рис. 3.17. Обеспечение видимости на кривых в плане:
а – общая схема видимости; б – построение кривой видимости
На плане закругления по линии траектории движения автомобиля откладывают расстояния видимости S, которые соединяются прямыми линиями. Огибающая этих линий определяет границу видимости.
Графическое определение границы видимости целесообразно, когда из зоны видимости необходимо удалить ценные здания или произвести другие дорогостоящие работы.
В остальных случаях можно определить максимальную стрелу видимости в центре круговой кривой аналитическим методом и принятии величину расчистки в пределах всей кривой одинаковой.
Стрела видимости в центре круговой кривой приближенно определяется из следующих соображений:
1-й случай: длина кривой меньше расстояния видимости К < S (рис. 3.18, а)
Z = Z1 + Z2,
где
![]() ,
,
![]() .
.
Откуда
![]() .
.
2-ой случай: длина
кривой больше расстояния видимости
![]() (рис. 3.18, б).
(рис. 3.18, б).
В этом случае второй член исчезает
![]() ,
,
где
![]() .
.
При K = S, β = α
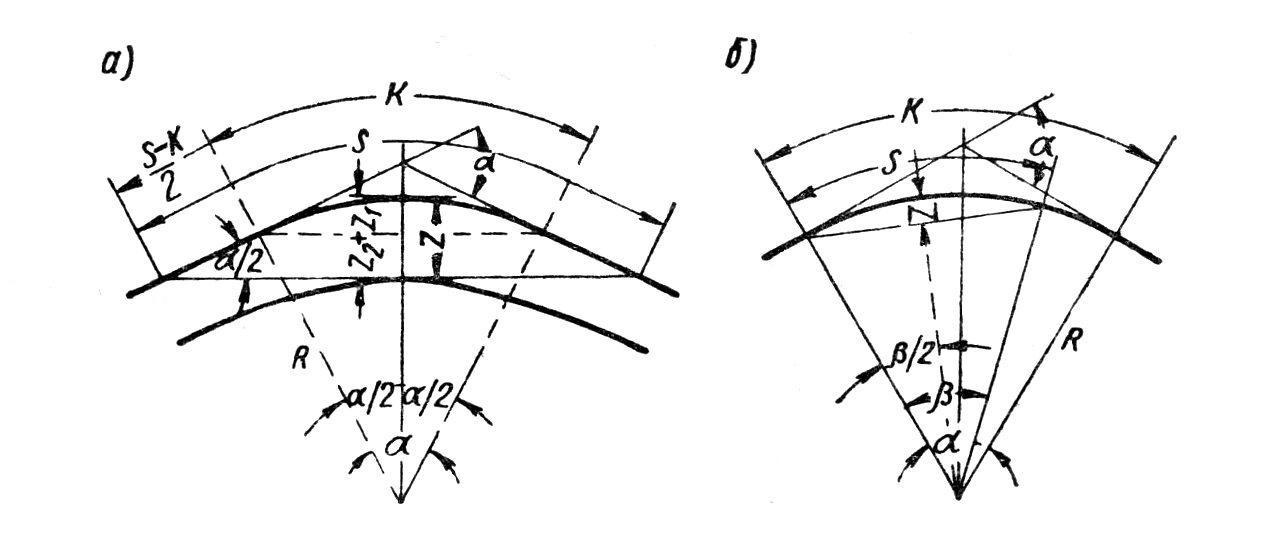
Рис. 3.18. Схема к расчету зависимости между радиусом кривой, углом поворота и расстоянием видимости в плане
Проверка обеспечения видимости производится путем построения поперечника дороги (рис. 3.19). Видимость проверяется для автомобиля, едущего по крайней правой полосе движения Глаза водителя расположены на высоте 1,2 м от поверхности дороги на расстоянии 1,5 от края проезжей части.
В выемках целесообразно срезку откосов доводить до уровня по поверхности дороги с учетом зарастания откосов кустарником и выпадения снега (рис. 3.19, б).

Рис. 3.19. Проверка обеспечения видимости на кривых:
а – граница вырубки деревьев в насыпи; б – граница срезка откоса в выемке; 1 – расчистка для обеспечения видимости в лесу; 2 – граница зоны видимости; 3 – срезка в выемки; 4 – наиболее целесообразный уровень срезки; 5 – положение глаз водителя
Видимость дороги на кривых в плане ночью обеспечивается за счет света фар (рис. 3.20).

Рис. 3.20. Видимость ночью на кривой в плане при свете фар
Современные фары освещают дорогу на расстоянии S = 100–175 м. Середина пучка света направлена по касательной к траектории движения. Угол раствора пучка света α = 2°. При малых радиусах кривых в плане большая часть света не попадает на поверхность дороги. Минимальный радиус кривой в плане, обеспечивающий расстояние видимости можно определить из следующих соображений: Если пучок света фар расходится под углом α, то центральный угол β, стягивающий дугу, равную расстоянию видимости S, равен 2α.
Поскольку
![]() ,
то
,
то
![]() .
.
При S ≈ 100 м, α = 2°, Rmin ≈ 1500 м. Безопасность на дороге ночью может быть улучшена за счет установки на внешней обочине столбиков с отражателями.