

Новгородский государственный университет имени Ярослава Мудрого
Кафедра механизации сельского хозяйства
Экзаменационный билет № 16
Государственный междисциплинарный экзамен для специальности 110301 – Механизация сельского хозяйства
1. Способы и кинематические схемы поворота колёсных машин, их сравнительный анализ. Регулировки рулевых управлений тракторов и автомобилей.
Сельскохозяйственное производство связано с транспортировкой различных грузов: зерна, удобрений, горючего, кормов и др. Транспортные работы по объему составляют примерно 30% всех работ в сельском хозяйстве. Значительный объем перевозок сельскохозяйственных грузов осуществляется тракторными поездами. Время, затрачиваемое на перевозку грузов колесными тракторами, составляет более 50% общего годового рабочего времени.
Трактор или автомобиль движется от пункта отправления к пункту назначения по пути сложной конфигурации, состоящему из прямолинейных и криволинейных участков. Для движения в заданном направлении водитель воздействует на органы управления, что приводит к изменению положнеия машины на опорной поверхности. Использование принципов системного подхода позволяет рассматривать поворот трактора и автомобиля как систему машина — водитель — опорная поверхность (почва). Одним из главных свойств машины как звена в системе является управляемость.
Под управляемостью маши»ы понимают ее способность точно сохранять заданное направление движения (заданный курс), а при соответствующем воздействии изменять его по требуемой траектории. Первое свойство называют курсовой устойчивостью, а второе — поворачиваемостью машины.
В качестве критериев оценки управляемости и поворачивае-мости колесных машин применяют следующие количественные показатели: минимальный радиус поворота при круговом движении; предельное значение скорости изменения кривизны траектории различных точек; количество энергии, затрачиваемое на управление при движении по заданной траектории; удельная сила тяги, необходимая при повороте; коэффициент использования сцепного веса при повороте.
Чем меньше радиус поворота, больше предельная скорость изменения кривизны траекторий характерных точек и меньше энергии затрачивается на управление, тем лучше управляемость и поворачиваемость колесной машины.
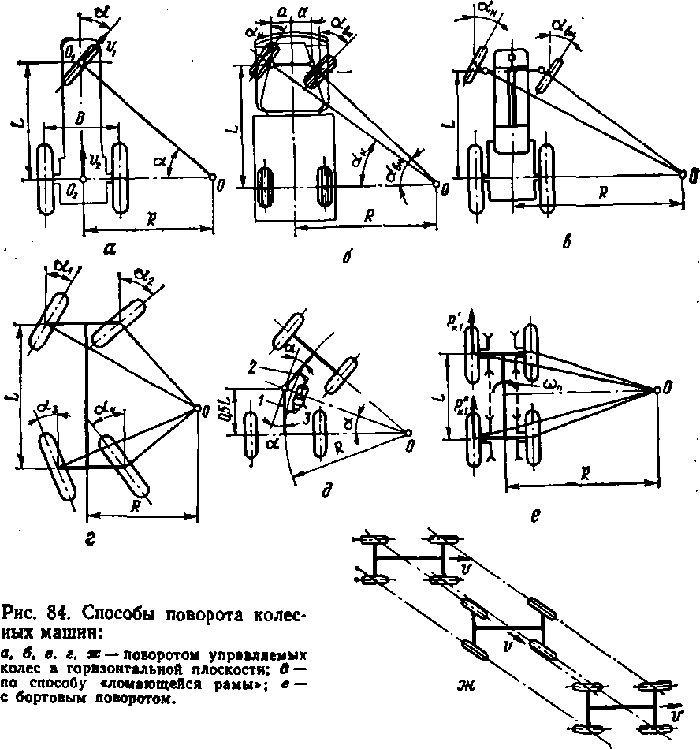
Основной способ поворота колесных машин — поворот управляемых колес в горизонтальной плоскости (рис. 84, а, б, в, г, ж). Обычно в качестве управляемых используют передние колеса, которые могут быть меньше задних (в универсально-пропашных тракторах) или одинакового с ними размера.
Некоторые тракторы и автомобили, чаще всего полноприводные, выполняют со всеми управляемыми колесами. Направления движения такой машины изменяют двумя способами: 1) передние и задние колеса поворачивают в разные стороны (рис. 84, г), и машина движется по окружности, центром О которой является пересечение осей вращения колес; 2) все колеса поворачивают в одну сторону (рис. 84, ж). Последний способ называют «краб». При повороте способом «краб» можно предотвратить сползание тракторов, работающих на косогорах, сместив все колеса на некоторый угол в сторону, противоположную направлению сползания. При этом улучшается и поперечная устойчивость трактора.
Однако при повороте машин с управляемыми колесами трудно получить малые радиусы поворота. Привод рулевого управления этих машин, особенно машин со всеми управляемыми колесами, имеет сложную конструкцию. Полезный объем таких машин уменьшен из-за наличия в корпусе ниш, необходимых для размещения управляемых колес при их повороте.
В связи с этим созданы новые схемы поворота по способу «ломающейся рамы» (рис. 84, д). Такие машины представляют собой систему из шарнирно сочлененных секций / и 2, поворачивающихся одна относительно другой в двух плоскостях. Направление движения такой машины изменяют поворотом одной секции относительно другой с помощью гидроцилиндра 3 на некоторый угол а в горизонтальной плоскости. При данном способе поворота достигаются хорошая маневренность и малые радиусы поворота, а также уменьшается число шарниров, так как оси колес неподвижны по отношению к рамам. Однако такие машины не могут работать на склонах.
Стремление создать высокоманевренный и простой по конструкции колесный трактор привело к появлению машины с колесной формулой 4К4 и управлением, выполненным по схеме поворота гусеничного трактора, т. е. с бортовым поворотом (рис. 84, е). Передние и задние колеса каждой стороны соединены шестеренной или цепной передачей. При повороте трактора выключают колеса одного борта, а при необходимости крутого поворота тормозят их. Касательная сила тяги PKl создается на включенном борту трактора. В такой конструкции отсутствует сложная в изготовлении и эксплуатации шарнирная передача крутящего момента к ведущим и управляемым колесам.
Каждый из перечисленных способов поворота определяет своеобразие кинематики поворота. Рассмотрим сначала кинематику простейшего случая поворота на опорной поверхности трактора с одним передним управляемым колесом (рис. 84, а). Допустим, что радиус поворота постоянен, скорость движения установившаяся и шины не имеют боковой эластичности. При этих условиях движение трактора на повороте можно рассматривать как вращение вокруг постоянной оси. Чтобы найти ее положение, достаточно определить, где на опорной поверхности пересекаются плоскости, нормальные к векторам скоростей любых двух точек остова трактора, например точки 0\ середины передней оси и точки Ог середины заднего моста. Так как скорости v\ и V2 указанных точек перпендикулярны соответствующим осям, то плоскости, нормальные к векторам скоростей точек 0\ и 02, проходят через геометрические оси соответственно переднего и задних колес. Точка О пересечения этих осей определяет положение проекций искомой оси вращения на опорной поверхности. Эту точку называют центром поворота.
Расстояние 002 от центра поворота до середины заднего моста называют радиусом поворота и определяют по формуле
tf=Ictga, (108)
где L — продольная база трактора, м; о — угол отклонения переднего колеса от его нейтрального положения при прямолинейном движении, град.
Минимальный радиус поворота Rm\n зависит от продольной базы L машины и возможного максимального угла ат»х отклонения колеса от нейтрального положения. Обычно атах=35...
45°. Минимальный радиус поворота по схеме на рисунке 84, д:
^min = 0,5Lctgamal, (109)
где ата<—максимальный угол, на который может быть отклонена от нейтрального положения каждая секция машины.
Для сравнительных расчетов используют относительный радиус поворота
р = Я/£, (110)
где В — ширина колеи машины.
На рисунке 84, б показан поворот автомобиля с двумя передними управляемыми колесами. Чтобы все колеса на опорной поверхности вращались без боковых скольжения и деформаций шин, центр вращения должен лежать на пересечении осей колес. Для этого необходимо отклонять управляемые колеса от нейтрального положения на разные углы, определяемые из следующих соотношений:
ctg«BH = {R-a)lL\ ctgaH - (R+a)/L,
где а»,, и ав — углы отклонения от нейтрального положения соответственно внутреннего и наружного по отношению к центру поворота колес; а — половина расстояния между осями шкворней поворотных цапф управляемых колес.
Разность ctgaH—ctgaBH=2a/L постоянна независимо от радиуса поворота. Соблюдение требуемого соотношения между углами ан и ави часто достигается применением для поворота цапф управляемых колес специального четырехзвенного механизма, называемого рулевой трапецией. При правильном подборе параметров рулевой трапеции соотношения между углами ан и аВн достаточно близки к теоретическим.
В тракторах с регулируемой шириной колеи эти соотношения выдерживаются с достаточной точностью лишь при определенной расстановке колес, применительно к которой были подобраны параметры рулевой трапеции. При изменении ширины колеи требуемые соотношения нарушаются.
При повороте машины с двумя передними управляемыми колесами на опорной поверхности часто для упрощения рассматривают средний угол поворота управляемых колес а= - (аВн+ан)/2.
Переход от прямолинейного движения на опорной поверхности к криволинейному с установившимся радиусом совершается не мгновенно, а по дуге, радиус кривизны которой постепенно уменьшается от начального R = oo до заданного конечного значения #=const. Аналогично выход из поворота совершается по дуге, радиус кривизны которой постепенно увеличивается от R=const до # = оо. Таким образом, движение с постоянным радиусом происходит лишь на части траектории поворота.
Длина переходных участков зависит от конструктивных параметров машины — продольной базы и конструкции рулевого привода, а также от эксплуатационных факторов — скорости движения на повороте и резкости поворота. Чем выше скорость и чем плавнее осуществляется поворот, тем больше длина переходных участков.
Регулировки рулевых управлений тракторов и автомобилей.
Регулировка рулевого управления сводится к уменьшению зазоров в сочленениях и к правильной установке направляющих колес. Если рулевое управление отрегулировано правильно, то при прямолинейном движении трактора свободный ход рулевого колеса не превышает угла 20°. Причем свободный ход получается за счет рабочих зазоров в сопряжениях деталей. Регулировка проводится в такой последовательности.
Регулировка шарниров тяг
Расшплинтовать и завернуть пробку шарнира до устранения ощутимого зазора в нем и, совместив паз пробки с отверстием в головке тяги, зашплинтовать ее. В шарнире с новыми деталями затягивают пробку до упора и отворачивают ее на 1/2 оборота.
Также вращением наконечников рулевых тяг делается схождение колес (около 2 мм).
Проверка и регулировка конических подшипников червяка
Проверить и подтянуть крепления деталей к корпусу рулевого механизма; отъединить от рулевой сошки продольную тягу и вращением руля вывести ролик сошки из зацепления с червяком; перемещая рулевое колесо в осевом направлении, определить зазор в подшипниках червяка. Если он ощущается, его необходимо отрегулировать, снимая прокладки из-под крышки корпуса.
При правильной регулировке рулевое колесо поворачивается от усилия 0,3 — 0,8 кг.
После регулировки ввести ролик сошки в зацепление с червяком.
Проверка и регулировка зацепления ролика с червяком. Установить ролик в среднее положение червяка. Для этого подсчитать число оборотов рулевого колеса при повороте червяка из одного крайнего положения в другое и повернуть колесо на половину сделанных оборотов.
Проверить угол поворота червяка и разбег сошки. При верной регулировке червяк вращается от среднего положения вправо и влево на угол 100° от усилия 1,5 — 2,2 кг, приложенного к ободу рулевого колеса; конец рулевой сошки имеет разбег не более 0,3 мм; угол поворота сошки в ту и другую сторону от среднего положения не менее 45°. При этом в крайних положениях ролика допускается свободный ход рулевого колеса до 30°.
В случае отклонения от указанных требований нужно снять рулевой механизм с трактора и регулировочным винтом вала рулевой сошки отрегулировать зацепление ролика с червяком до беззазорного в среднем положении, после чего установить рулевой механизм па трактор и поставить другие снятые детали.
Регулировка сходимости направляющих колес. Расстояние между покрышками колес на уровне оси в передней части должно быть на 8 — 12 мм меньше, чем в задней части. Это достигается регулировкой поперечной тяги.
Для получения наименьшего одинакового радиуса поворота трактора направо и налево устанавливают одинаковые наибольшие углы поворота направляющих колес.
Проверка и регулировка наибольших углов поворота направляющих колес. Повернуть рулевое колесо из крайнего положения в среднее. При одинаковых углах поворота правого и левого колес они займут положение, соответствующее движению трактора по прямой. В противном случае необходимо закрепить рулевое колесо в среднем положении и, вращая трубу толкающей тяги, установить колеса в положение, соответствующее прямолинейному движению трактора.