

ПРЕДИСЛОВИЕ |
|
. |
ru |
|
|
||
|
antigtu |
|
|
Курс лекций предназначен для студентов технических университетов и |
|||
состоит из четырех частей, в которых излагается теоретический материал |
|||
курса математики для инженеров.
В первой части излагаются следующие разделы: линейная алгебра, аналитическая геометрия, начала математического анализа (теория пределов и дифференцирование).
Во второй части излагаются следующие разделы: исследование функций, неопределенный и определенный интегралы, дифференциальные уравнения, дифференциальное исчисление функций нескольких переменных
В начале каждой лекции приведены заголовки разделов. В совокупности эти заголовки образуют программу дисциплины и являются базой вопросов для тестовых и экзаменационных заданий. Звездочкой помечены разделы, предназначенные для более глубокого изучения. В конце каждой лекции приведен список ключевых понятий.
В лекциях студент найдет основные определения, формулировки теорем, примеры, демонстрирующие методы решения типичных задач. Если отсутствуют доказательства каких–либо утверждений, то формулировки результатов сопровождаются примерами, разъя няющими их смысл.
|
В тексте приняты следующие условные обозначения: |
|
|
определение |
с |
О |
|
|
Т |
теорема |
|
С |
следствие |
|
! |
замеч ние |
|
|
Скачано |
|

Лекции 1-2 |
. |
ru |
|
||
ОПРЕДЕЛИТЕЛИ И МАТРИЦЫ |
|
|
|
|
В лекциях 1 – 2 излагаются элементы линейной алгебры, в них приведены первоначальные сведения о матрицах и определителях и их применении. Матричное исчисление широко применяется в различных областях математики (решение систем линейных уравнений, векторная алгебра, дифференциальные уравнения, теория вероятности), механики, электротехники, теоретической физики и т.д. Матричное исчисление позволяет в компактной форме получить решение реальных задач, содержащих большое количество переменных.
1.1. Понятие матрицы. Частные виды матриц
1.2.* |
Перестановки и подстановки |
|
|
1.3.* Понятие определителя любого порядка |
|||
1.4. Определители второго и третьего порядка |
|||
1.5. |
Свойства определителей |
|
|
1.6. Теорема о разложении определителя по строке (столбцу) |
|||
1.7. Методы вычисления определителя n-го порядка |
|||
|
1.7.1. Метод понижения порядка |
||
|
1.7.2. Метод сведения к треугольному виду |
||
2.1. |
|
с |
|
Операции над матрицами |
|
||
2.2. Обратная матрица. Теорема о существовании левой и правой |
|||
|
обратной матрицы. Алгоритм нахожденияantigtuобратной матрицы |
||
2.3. |
Решение матричных уравнений |
|
|
Скачано |
|
|
|
2.4. Ранг матрицы. Метод окаймляющих миноров. |
|||
|
Элементарные преобразования матриц |
||
Ниже будут использ ваться с кращенные способы записи сумм и произведений |
|||
большого количества элемент в: |
|
|
|
|
n |
|
n |
|
∑aj = a1 + a2 +…+ an , |
∏aj = a1 a2 … an . |
|
|
j=1 |
|
j=1 |
1.1. Понятие м трицы. Частные виды матриц
О |
Матрицей размерности m ×n называется прямоугольная таблица чисел |
|||||||||||||
|
aij |
|
|
|
|
a11 |
a12 |
... |
a1n |
|||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
a |
a |
... |
a |
|
||
|
A = |
|
a |
|
m,n |
= (a ) |
m,n |
= |
21 |
|
22 |
|
|
2n , |
|
|
|
ij |
|
ij |
... ... |
... |
... |
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
a |
m1 |
a |
m2 |
... |
a |
|
|
|
|
|
|
|
|
|
|
|
|
mn |
|||
6 |
|
Лекции 1-2 |
. |
ru |
|
где i =1,...,m; j =1,...,n , расположенных в m строках и n столбцах. Числа aij называют элементами матрицы. Числа i, j - индексы элемента матрицы, ука-
зывающие его местоположение: i - номер строки, j - номер столбца. Число
элементов матрицы m ×n определяется как произведение числа строк m на число столбцов n .
Частные виды матриц
О |
|
Нулевой матрицей размерности m ×n называется матрица, все эле- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
менты которой равны нулю, например: = |
. |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Матрица размерности 1×n |
называется матрицей-строкой или просто |
||||||||||||
О |
|
||||||||||||||
|
|
строкой, например: B = (2 |
1 7,3)1,3 . |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
Матрица размерности m ×1 называется матрицей-столбцом или просто |
|||||||||||||
О |
|
||||||||||||||
|
|
|
|
|
7 |
|
|
antigtu |
|
|
|||||
|
|
|
|
|
|
|
|||||||||
|
|
столбцом, например: |
|
|
|
|
|
|
|||||||
|
|
C = 3,5 |
. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
0 3,1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
О |
|
Матрица |
называется |
квадратной, |
если |
число |
ее |
строк |
равно числу |
||||||
|
|
столбцов, |
m = n . Число n называется порядком матрицы, |
например при |
|||||||||||
|
|
||||||||||||||
|
|
n=3: |
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
7 |
0 |
|
|
|
|
|
|
|
|
|
|
|
D = |
. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
4 |
5 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3,3 |
|
|
|
|
|
|||
|
|
Главной ди гон лью квадратной матрицы называется диагональ, со- |
|||||||||||||
О |
|
||||||||||||||
|
|
ставленн я из чисел a11,a22 ,...,ann , идущая из левого верхнего угла в пра- |
|||||||||||||
|
|
||||||||||||||
|
|
вый нижний; побочной называется диагональ, идущая из правого верх- |
|||||||||||||
|
|
него угла в левый нижний: |
|
|
|
|
|
|
|
|
|
|
|
||
|
Скачано |
|
|
|
|
|
|
|
|
|
|
. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Определители и матрицы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
7 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Квадратная матрица называется диагональной, если все элементы, |
|
|||||||||||||||||
|
О |
|
|
||||||||||||||||||
|
|
|
стоящие выше и ниже главной диагонали, равны нулю: |
. |
|
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
6 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
A = |
0 |
2 |
|
0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
−11 |
|
|
|
|
|
|||
|
О |
|
Квадратная матрица называется |
треугольной, если все ее элементы, |
|||||||||||||||||
|
|
|
расположенные по одну сторону главной диагонали, равны нулю: |
|
|||||||||||||||||
|
|
|
|
4 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
0 |
7 |
5 |
|
- верхняя треугольная матрица; |
|
|
|||||||||||
|
|
|
D = |
|
|
|
|||||||||||||||
|
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
3 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
6 |
−2 |
0 |
|
- нижняя треугольная матрица. |
|
|
|||||||||||
|
|
|
D = |
|
|
|
|||||||||||||||
|
|
|
|
4 |
−8 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
О |
|
Квадратная диагональная матрица с единичными элементами называется |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
единичной и обозначается буквой Е. |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Например, единичная матрица 3-го порядка имеет вид: |
|
|
|
|||||||||||||||
|
|
|
Скачано |
|
|
|
|
|
1 |
0 |
0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
E = |
0 |
1 |
0 . |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
|
|
Транспонированием матрицы называется преобразование, состоящее в |
||||||||||||||||||
|
О |
|
|||||||||||||||||||
|
|
|
замене строк столбцами с с хранением их номеров. |
|
|
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
Таким образом, строки да |
|
ой матрицы будут в той же последователь- |
||||||||||||||||
|
|
|
ности столбцами тра спо ированной матрицы, и наоборот. |
|
|
||||||||||||||||
|
|
|
|
|
|
|
1 |
|
2 |
3 |
|
|
|
|
|
1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
, |
|
T |
|
2 5 |
|
|
|
|
||||||
|
|
|
|
|
A = |
4 |
|
5 |
6 |
|
|
A |
= |
. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
6 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В слу ае квадратной матрицы транспонирование сводится к повороту м трицы на 180˚ вокруг главной диагонали.

8 Лекции 1-2
1.2. * Перестановки и подстановки |
. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
О |
Перестановкой n символов a1 ,a2 ,...,an называется любое расположение этих сим- |
||||||||
|
волов в определенном порядке. |
antigtu |
|
|
|||||
|
|
|
|||||||
|
Так как данные n |
|
|
,n , то изучение пе- |
|||||
|
символов можно занумеровать числами 1,2, |
||||||||
|
рестановок любых n символов сводится к изучению перестановок этихruчисел. Число |
||||||||
|
всех перестановок из n чисел равно n! =1 2 3 ... n (читается: « n -факториал»). |
||||||||
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Все перестановки чисел 1, 2, 3 имеют вид: 123, 132, 213, 231, 312, 321. |
||||||
|
|
|
Число их 3! = 6. |
|
|
|
|||
|
|
|
|
|
|||||
|
|
||||||||
О |
Два числа в перестановке образуют инверсию, если большее число стоит впереди |
||||||||
|
меньшего, и образуют порядок, если меньшее число стоит впереди большего. |
||||||||
|
Способ подсчета числа инверсий: читаем числа перестановки в порядке их за- |
||||||||
|
писи (слева направо), для каждого из чисел считаем, сколько чисел, меньших данно- |
||||||||
|
го, стоит правее него, и все полученные числа складываем. |
|
|
||||||
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
В перестановке 528371964 число инверсий равно |
|
|
||||
|
|
|
|
|
|
4 + 1 + 5 + 1 + 3 + 2 + 1 = 17. |
|
|
|
|
|
|
|
||||||
|
Перестановка называет я четной или нечетной, смотря по тому, будет число инвер- |
||||||||
О |
|||||||||
|
сий в ней четно или нечетно. |
|
|
|
|||||
|
|
|
|
||||||
|
Скачано |
местами двух чисел перестановки. Транспози- |
|||||||
О |
Транспозицией называется переменас |
||||||||
|
ция чисел i и j |
б значается через (i, j). От любой перестановки n чисел к любой |
|||||||
|
|||||||||
|
другой перестан вке тех же чисел можно перейти путем ряда транспозиций, причем |
||||||||
|
можно обойтись |
е более чем n −1 транспозициями. |
|
|
|||||
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
От перест новки 25134 к перестановке 42513 можно перейти путем че- |
||||||
|
|
|
тырех тр нспозиций: (2,4),(2,5),(1,5),(1,3). |
|
|
||||
|
|
|
|
||||||
|
|
||||||||
О |
Подстановкой n исел 1, 2, … n, или подстановкой n-й степени, называется вза- |
||||||||
|
имно однозна ное отображение совокупности этих чисел на себя, т.е. такое отобра- |
||||||||
|
жение, при котором каждому числу от 1 до n соответствует одно из этих чисел и |
||||||||
|
двум р зличным числам всегда соответствуют два различных числа. |
||||||||
|
Подст новка записывается двумя строками в общих скобках, причем каждому |
||||||||
|
числу верхней строки соответствует стоящее под ним число нижней строки. |
||||||||
|
|
|
|
2 1 3 4 |
|
|
→1, 2 → 3 , 3 → 4 , |
||
|
Например, |
3 1 4 2 |
обозначает подстановку, в которой 1 |
||||||
|
|
|
|
|
|
|
|
||
4 → 2 . Иначе можно сказать, что подстановка n-й степени – это соответствие между двумя перестановками n чисел.

Определители и матрицы |
|
|
|
|
|
|
|
|
|
|
|
9 |
В зависимости от расположения чисел в верхней строке одну и ту же подстановку |
||||||||||||
можно записывать многими способами. |
|
|
|
|
|
|
|
|||||
Например, записи |
1 |
2 |
3 |
2 |
3 |
1 |
|
, |
3 |
2 |
1 |
обозначают одну и ту же |
|
3 |
, |
|
1 |
2 |
|
|
3 |
|
|||
|
2 |
1 |
3 |
|
|
1 |
2 |
|
||||
|
подстановку, в которой 1 переходит в 2, 2 в 3, 3 в 1. Каждая подстановка n чисел до- |
||
|
пускает n! различных записей. Число различных подстановок n элементов также |
||
|
равно n!. |
. |
ru |
|
ется число, полученное из элементов этой матрицыantigtuпо формулам: |
|
|
|
|
||
|
|
|
|
О |
|
|
|
О Подстановка называется четной, если общее число инверсий в обеих ее строках четно, и нечетной, если нечетно. Иначе говоря, подстановка четна, если ее строки име-
ют одинаковую четность, и нечетна, если – противоположную четность.
1.3. * Понятие определителя любого порядка
|
|
a11 |
a12 |
... |
a1 |
|
|
A = (a ) |
|
a |
|
a |
... |
a |
|
|
= |
21 |
22 |
... |
2 |
. |
|
ij |
n,n |
... ... |
... |
||||
|
|
a |
|
a |
... |
|
|
|
|
n1 |
n2 |
|
nn |
||
Определителем n -го порядка, или определителем матрицы A , при n >1 называ-
|
|
|
|
|
|
|
|
a11 |
|
a12 |
... |
a1n |
|
|
|
A |
|
= |
|
aij |
|
n,n = |
a21 |
|
a22 |
... |
a2n |
|
= ∑(−1)s+t ai1 j1 ai2 j2 ...ain jn , |
|
|
|
|
|
||||||||||
|
|
|
||||||||||||
|
|
|
...с... ... |
|||||||||||
|
|
|
|
|
|
|
|
... |
|
|
|
|||
|
|
|
|
|
|
|
|
an1 |
|
an2 |
... |
ann |
|
|
где сумма берется по всем различным между собой подстановкам |
||||||||||||||
|
|
|
|
|
|
|
|
i1 |
i2 |
... |
in |
|
||
|
|
|
|
|
|
|
|
|
j |
j |
... |
j |
, |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
n |
|
|
причем s - число инверсий в верхней, а t |
- в нижней строке. |
|||||||||||||
Слаг емые суммы н зываются членами определителя; каждый член опреде- |
||||||||||||||
лителя равен произведению n |
элементов матрицы, взятых по одному из каждой |
|||||||||||||
Скачано |
|
|
|
|
|
|
|
|||||||
строки и каждого столбца, причем это произведение берется со своим знаком, если подстановка индексов етна, и с противоположным, если нечетна.
Определитель первого порядка равен единственному своему элементу. Число всех членов определителя n -го порядка равно n !. Элементы, строки, столбцы и т. д. м трицы A н зыв ются соответственно элементами, строками, столбцами и т. д. определителя A .
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
Лекции 1-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1.4. Определители второго и третьего порядка |
|
|
|
|||||||||||||||||
О |
Определителем квадратной матрицы A второго порядка называется |
|||||||||||||||||||
|
число, равное det A = |
|
a11 |
a12 |
|
= a a |
|
− a |
|
a . |
. |
|
|
|||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
11 |
antigtu |
|
|
|||||||
|
|
|
|
|
|
a21 |
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Например, |
1 |
2 |
=1 4 − 2 |
3 = −2 . |
|
|
|
|
|
|
|
||||||||
|
3 |
4 |
|
|
|
|
|
|
|
|||||||||||
О |
Определителем квадратной матрицы А третьего порядка называется |
|||||||||||||||||||
|
число, равное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a11 |
a12 |
|
a13 |
|
|
|
|
|
|
|
|
|
|
|
det A = |
A |
= |
a21 |
a22 |
|
a23 |
= |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
a31 |
a32 |
|
a33 |
|
|
|
|
|
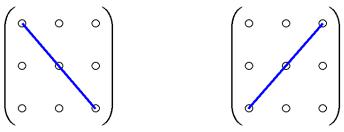
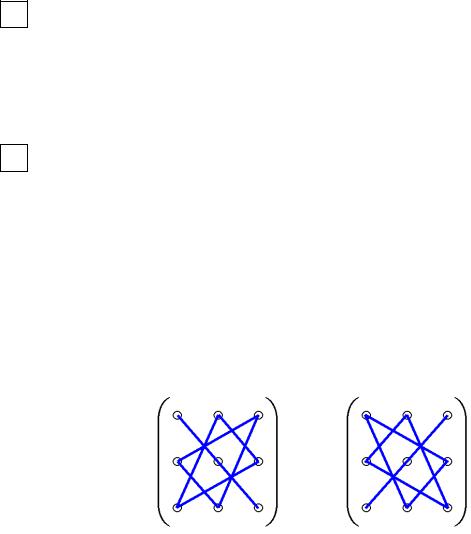
= a11a22a33 + a12a23a31 + a21a32a13 − a13a22a31 − a21a12a33 − a32a23a11 .
Это выражение получается по правилу треугольников (правилу Саррюса), которое можно пояснить следующей схемой:
Скачано |
|
с |
, |
|
+ |
|
- |
где элементы определителя изображаются кружками, а соответствующие произведения - отрезками или треугольниками. Знаки «+» и «-» соответствуют знакам слагаемых, входящих в определитель, например,
∆ = |
1 |
0 |
0 |
=1 2 1 + 0 1 0 +1 3 0 −0 2 0 −1 3 1−1 1 0 = −1. |
1 |
2 |
1 |
||
|
0 |
3 |
1 |
|
1.5. Свойства определителей
Сформулированные ниже свойства легко проверяются непосредственным вычислением определителей 2-го или 3-го порядков и остаются справедливыми для определителей порядка n .
Введем необходимые определения.
|
Определители и матрицы |
|
|
|
11 |
|
|
|
Суммой нескольких строк одинаковой длины называется строка, каж- |
||||
|
О |
|||||
|
|
|
|
. |
|
|
|
|
дый элемент которой равен сумме соответствующих элементов данных |
||||
|
|
строк. |
antigtu |
|
|
|
|
О |
Произведением строки на число называется строка, каждый элемент |
||||
|
|
которой получен из соответствующего элемента данной строки умноже- |
||||
|
|
|||||
|
|
нием его на данное число. |
|
|
ru |
|
|
О |
Линейной комбинацией нескольких строк одинаковой длины называ- |
||||
|
|
ется строка, равная сумме произведений данных строк на некоторые |
||||
|
|
|||||
|
|
числа, называемые коэффициентами этой линейной комбинации. Если |
||||
|
|
одна строка является линейной комбинацией других, то говорят, что она |
||||
|
|
линейно выражается через |
эти строки. Например, равенство |
|||
(1, −1, −3, −5)= 3(1,1,1,1)− 2(1, 2,3, 4) означает, что первая строка является линейной комбинацией двух других.
1˚. При транспонировании определителя его значение не меняется. Свойство 1˚ устанавливает полное равноправие строк и столбцов определителя |A|. Иначе говоря, свойства определителей, доказанные для строк, верны и для столбцов, и наоборот.
2˚. При перестановке местами двух любых строк (столбцов) определитель меняет знак.
3˚. Определитель, имеющий две одинаковые строки (столбца), равен 0.
Из 2˚: при перестановке |
трок ∆ = −∆, ∆ + ∆ = 0 , 2∆ = 0 ∆ = 0 . |
Скачано |
|
4˚. Общий множитель любой строки (столбца) можно выносить за знак оп- |
|
ределителя. |
с |
Это свойство можно сф рмулир вать иначе: умножение всех элементов некоторой строки (ст лбца) пределителя |A| на число k равносильно
умножению определителя |
а это число, например, |
|||||||||||
|
|
2 |
1 |
2 |
|
= 2 |
|
1 |
1 |
2 |
|
|
|
|
|
|
|||||||||
|
|
4 |
3 |
4 |
|
|
2 |
3 |
4 |
|
. |
|
|
|
6 |
5 |
6 |
|
|
|
3 |
5 |
6 |
|
|
5˚. Если все элементы некоторой строки (столбца) определителя |A| равны нулю, то и сам определитель равен нулю. Это свойство вытекает из предыдущего при k = 0.
6˚. Если все элементы одной строки (столбца) определителя пропорциональны соответствующим элементам другой строки (столбца), то он равен нулю.
7˚. Если всякий элемент любой строки (столбца) представляет собой сумму двух слагаемых, определитель равен сумме двух определителей, в пер-

12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лекции 1-2 |
вом из которых в соответствующей строке (столбце) оставлены первые |
|||||||||||||||||||||||||||
слагаемые, а во втором – вторые, например, |
|
|
|
|
|
|
. |
|
|
ru |
|
||||||||||||||||
|
|
1 |
2 |
3 |
|
|
|
1 |
2 |
3 |
|
|
|
|
1 |
2 |
3 |
|
|
|
1 |
2 |
3 |
|
|
||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
4 |
5 |
6 |
|
= |
|
1 + 3 3 + 2 5 +1 |
|
= |
|
1 |
3 |
5 |
|
+ |
|
3 |
2 |
1 |
|
|
|||||
|
|
7 |
8 |
9 |
|
|
|
7 |
8 |
9 |
|
|
|
|
7 |
8 |
9 |
|
|
|
7 |
8 |
9 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|||||||||||
8˚. Если к элементам любой строки (столбца) определителя прибавить соответствующие элементы другой строки (столбца), умноженные на любое
число, то он не изменится.
Пользуясь свойством 8˚, можно все элементы некоторой строки (столбца) определителя, кроме одного, сделать равными нулю, не меняя при этом величину определителя.
1.6. Теорема о разложении определителя по строке (столбцу)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a11 |
a12 |
... |
a1n |
|
|
|
|
Рассмотрим определитель n -го порядка |
|
A |
|
= |
a21 |
a22 |
... |
a2n |
. |
||||||||||||
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... ... ... ... |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an1 |
an2 |
... |
ann |
|
|
|
|
Минором Мij элемента аij определителя n-го порядка называется опре- |
|||||||||||||||||||||
О |
|
||||||||||||||||||||||
|
|
делитель (n-1) |
порядка, |
полученный |
|
из исходного |
вычеркиванием |
||||||||||||||||
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i-строки и j–ст лбца, на пересечении которых стоит элемент aij. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|
|
4 |
5 |
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Н пример, ∆ = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
4 |
5 |
6 |
|
, M13 = |
, M32 = |
. |
|
|
|
|
||||||||||
|
|
|
|
7 |
8 |
9 |
|
|
|
7 |
8 |
|
|
|
4 |
6 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Алгебраическим дополнением Аij элемента аij называется его минор со |
|||||||||||||||||||||
О |
|
||||||||||||||||||||||
|
|
зна ом (-1)i+j, где i – номер строки, а j – номер столбца, на пересечении |
|||||||||||||||||||||
|
|
||||||||||||||||||||||
|
|
которых стоит элемент aij, |
A = (−1)i+ j M |
ij |
, например, |
|
|
|
|||||||||||||||
|
Скачано |
|
|
|
ij |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||

|
|
n |
|
|
|
|
|
|
|
|
ru |
|
13 |
Определители и матрицы |
|
|
|
|
|
|
|
|
|
|
|||
A = (−1)1+3 M |
13 |
= (−1)4 M |
13 |
= M |
13 |
, |
A = (−1)3+2 M |
32 |
= (−1)5 M |
32 |
= −M |
32 |
. |
13 |
|
|
|
32 |
|
|
|
||||||
Т |
Определитель n-го порядка |A| численно равен сумме произведений эле- |
|
antigtu |
|
ментов любой его строки (столбца) на соответствующие алгебраические |
дополнения: .
det A = ∑aij Aij = ai1 Ai1 + ai2 Ai2 +... + ain Ain , i =1,..., n , i=1
n
det A = ∑aij Aij = a1 j A1 j + a2 j A2 j +... + anj Anj , j =1,..., n . i=1
Эти формулы представляют собой разложение определителя по i-й строке и по j-му столбцу. Например, для определителей третьего порядка разложение по первому столбцу имеет вид:
|
|
a11 |
|
|
a12 |
a13 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
a21 |
|
|
a22 |
a23 |
|
= a11 A11 + a21 A21 + a31 A31 = |
||||||||||||
|
|
a31 |
|
|
a32 |
a33 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
= a |
|
a22 |
a23 |
|
− |
с |
|
12 |
13 |
|
+ |
|
12 |
a13 |
|
= |
||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
11 |
|
a |
a |
|
|
21 |
a |
a |
|
|
31 |
a |
a |
|
|
||
|
|
|
|
|
32 |
33 |
|
|
|
|
|
32 |
33 |
|
|
|
22 |
23 |
|
|
|
= a11a22a33 + a12a23a31 + a21a32a13 − a13a22a31 − a21a12a33 − a32a23a11 . |
|||||||||||||||||||
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
||||||||
С |
Алгебраическая сумма произведений элементов любой строки (столбца) |
|||||||||||||||||||
|
определителя |A| на алгебраическое дополнение соответствующих эле- |
|||||||||||||||||||
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
ментов другой стр ки (ст лбца) равна нулю: ∑Aij akj = 0,k ≠ i . |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j=1 |
|||
|
Непосредстве |
ым вычисле ием показывают, |
что этой сумме соответ- |
|||||||||||||||||
ствует определитель с двумя одинаковыми строками (столбцами).
1.7. Методы вы исления определителя n-го порядка
Определители высшего порядка вычисляются с использованием их свойств двумя способами.
14 |
ru |
Лекции 1-2 |
|
1.7.1. Метод понижения порядка
Так как в формуле разложения определителя n-го порядка по строке
(столбцу)
detA= ∑n aij Aij = ai1 Ai1 + ai2 Ai2 + ...+ ain Ain , .
j=1
все алгебраические дополнения являются определителями (n-1)-го порядка, то задача свелась к вычислению n определителей меньшего, (n-1)-го порядка.
Если в некоторой строке исходного определителя много нулей, то именно по ней удобно проводить разложение. Более того, используя свойство 8˚, можно добиться того, что все элементы некоторой строки (столбца), кроме
одного, станут равны нулю.
1.7.2. Метод сведения к треугольному виду
Используя свойства 1˚– 8˚, добиваются такой структуры определителя,
при которой все его элементы, стоящие выше (ниже) главной диагонали, равны нулю, т.е. определитель имеет треугольную форму и численно равен произведению элементов, стоящих на главной диагонали:
antigtu
|
|
|
|
a11 |
a12 |
|
|
|
|
|
... |
|
|
|
1n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
A |
= |
0 |
|
|
a22 |
|
|
|
|
|
... |
|
|
|
2n |
= ∏aii =a11 a22 ... ann . |
|
||||||||||||||||||||||||
|
|
|
|
... ... ... ... |
|
|
|
i |
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
... |
|
|
|
ann |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Вычислить |
пределитель ∆ = |
|
1 |
0 |
0 |
|
|
|
двумя способами. |
|
||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
1 |
2 |
1 |
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1). Разложим определитель по первой строке: |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
∆ =1 (−1)1+1 |
|
2 1 |
|
|
+ 0 (−1)1+2 |
|
1 1 |
|
+ 0 (−1)1+3 |
|
1 2 |
|
= 2 −3 = −1. |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
0 |
3 |
|
|
|
|
||||||
|
2). Приведем определитель к треугольному виду: |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
1 |
|
0 |
0 |
|
|
|
|
1 |
|
0 |
0 |
|
|
|
|
1 |
0 |
|
|
|
0 |
|
|
|
|
|
1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 2 1 |
|
= |
|
0 2 1 |
= |
|
|
0 2 |
|
|
|
1 |
|
=1 2 |
− |
|
|
|
= −1. |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
3 |
1 |
|
|
|
|
0 |
|
3 |
1 |
|
|
|
|
0 |
0 |
|
|
|
− 0,5 |
|
|
|
|
|
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||

Определители и матрицы |
|
|
|
|
|
|
|
|
|
|
|
. |
ru |
15 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2.1. Операции над матрицами |
|
|
|
|
|
|
|
|
|||||||||||
О |
Две матрицы |
A = (aij ) |
и B = (bij |
) |
m,n |
равны, A = B , если равны их размер- |
|||||||||||||
|
|
|
|
|
|
|
m,n |
|
|
|
|
|
|
|
|
|
|
|
|
|
Свойства операции умножения на чи лоantigtu: |
|
|
aij = bij , |
|||||||||||||||
|
ности |
и |
все |
их |
соответствующие |
элементы совпадают, |
|||||||||||||
|
i =1,...,m; |
j =1,...,n . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
О |
Суммой двух матриц A = (aij ) |
m,n |
и B = (bij ) |
m,n |
одинаковой размерности m ×n |
||||||||||||||
|
называется матрица |
C = (cij ) |
|
|
, |
|
C = A + B , |
все элементы которой равны |
|||||||||||
|
|
|
|
|
|
|
|
|
m,n |
|
|
|
|
|
|
|
|
||
|
cij = aij + bij , |
i =1,..., m; |
j =1,..., n . |
|
|
|
|
|
|
||||||||||
|
Свойства операции сложения: |
1˚. A + B = B + A . |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2˚. A + B +C = (A + B) +C . |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
3˚. A + = A . |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
4˚. A + (−A) = . |
|
|
|
|||||
О |
Произведением матрицы A = ( |
ij ) |
на число α называется матрица |
||||||||||||||||
|
B = (bij ) |
|
|
|
|
|
|
|
|
с |
|
|
m,n |
|
|
|
|
|
|
|
m,n |
, |
B =α A, |
все |
элементы |
которой |
равны |
bij =αaij , |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i =1,...,m; |
j =1,...,n . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Скачано |
|
|
|
5˚. (α β)A =α(β A) . |
|
|
|
|||||||||||
|
|
|
|
6˚. α( A + B) =α A +αB . |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
7˚. (α + β) A =α A + β A . |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
8˚. 0 A = ; 1 A = A . |
|
|
|
|||||
|
Для доказательства свойств 1˚-8˚ достаточно воспользоваться соответст- |
||||||||||||||||||
вующими определе иями. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Операция умножения двух матриц вводится только для случая, когда |
||||||||||||||||||
число столбцов первой м трицы равно числу строк второй матрицы. |
|
||||||||||||||||||
О |
Произведением матрицы A = (ail )m,n размерности (m ×n) |
на матрицу |
|||||||||||||||||
|
B = (blj )n,k |
размерности |
(n ×k ) |
|
называется матрица |
C = (cij ) |
= A B |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m,k |
|
р змерности (m ×k ), элементы которой вычисляются по формуле: |
||||||||||||||||||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cij |
= ∑ail |
blj |
= ai1 b1 j + ai2 b2 j |
+... + ail |
blj i =1,..., m , |
j =1,...,k . |
||||||||||||
l=1

16 |
|
Лекции 1-2 |
. |
ru |
|
Иначе: элемент, стоящий на пересечении i-й строки и j-го столбца матрицы произведения cij , равен сумме произведений элементов i-й строки
матрицы А на соответствующие элементы j-го столбца матрицы В.
Пример: |
|
|
|
|
|
|
|
antigtu |
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
1 |
9 |
10 |
. Найти C = A |
B . |
||||
|
Дано: A = |
|
, B = |
|
2 |
|
|
||||
|
2 |
4 |
0 |
|
1 |
|
|
|
|||
|
c11 =1 1+3 0 =1, |
|
|
c12 =1 9 +3 2 =15 , |
c13 =1 10 +3 1 =13 , |
||||||
|
c21 = 2 1+ 4 0 = 2 , |
|
c22 = 2 9 + 4 2 = 26 , |
c23 = 2 10 + 4 1 = 24 . |
|||||||
|
1 |
15 |
13 |
|
|
|
|
|
|
|
|
|
C = |
26 |
. |
|
|
|
|
|
|
|
|
|
2 |
24 |
|
|
|
|
|
|
|
|
|
Свойства операции умножения матриц: |
|
||||||||||
|
|
|
с |
|
|
|
|
|
|
|
|
|
9˚. (A× B)×C= A×( B× C) (A× B)× C= A×( B× C). |
||||||||||
|
10˚. (A+ B)× C = A× C+ B× C. |
|
|||||||||
|
11˚. A×( B + C)= A× B+ A× C. |
|
|||||||||
|
12˚. A×E=E× A= A. |
|
|
|
|||||||
Скачано |
|
|
|
|
|
|
|
|
|
||
|
13˚. A× = × A = . |
|
|
||||||||
|
14˚. (A×B) |
T |
= B |
T |
|
T |
. |
|
|||
|
|
|
× A |
|
|||||||
15˚. det(A× B) = det A×det B .
Для доказательства свойств 9˚-14˚ достаточно воспользоваться определениями операций ад матрицами.
О Матрицы A и B н зыв ются перестановочными (коммутирующими),
если A×B=B×A. В общем случае произведение матриц не коммутативно, A×B≠B×A.
Определители и матрицы |
17 |
2.2. Обратная матрица. Теорема о существовании левой и правой обратной матрицы.
Алгоритм нахождения обратной матрицы
О |
Квадратная матрица A n–го порядка называется вырожденной, если оп- |
||||||||||||
|
ределитель этой матрицы равен нулю, |
|
A |
|
= 0 |
, и невырожденнойru |
, если |
||||||
|
|
|
|||||||||||
|
|
A |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
≠ 0 . |
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||
|
Матрица А-1 называется обратной матрицей для некоторой квадратной |
||||||||||||
О |
|||||||||||||
|
матрицы А, если выполняется соотношение: A× A−1 = A−1 × A = E . |
|
|||||||||||
|
|
||||||||||||
|
Теорема о существовании и единственности обратной матрицы. |
||||||||||||
Т |
|||||||||||||
|
|
|
|
Если матрица A не вырождена, то существует, и притом единст- |
|||||||||
|
|
|
|
||||||||||
|
венная, обратная матрица A−1 , равная A−1 = |
|
1 |
|
( A )T , где A = (Aij )- |
||||||||
|
det |
A |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
присоединенная матрица (матрица, составленная из алгебраических до- |
||||||||||||
|
полнений элементов исходной матрицы). |
|
|
|
|
|
|||||||
|
Доказательство: |
|
|
|
|
|
|||||||
|
Пусть дана квадратная матрица порядка n : |
|
|
|
|
|
|||||||
по теореме о разложении определителя по строке (столбцу),
|
|
|
a11 |
a12 |
... |
a1n |
|
||||
|
|
|
|
a |
|
|
|
|
|
|
|
|
A = (a ) |
|
= |
21 |
a antigtu... a |
||||||
|
|
|
|
22 |
|
2n |
. |
||||
|
ij |
n,n |
... ... |
... ... |
|
||||||
|
|
|
a |
n1 |
a |
n2 |
... |
a |
nn |
|
|
|
|
|
|
|
|
|
|
|
|||
1. |
|
|
с |
|
|
|
|
|
|
|
|
Доказательство существ вания (необходимость). Пусть существует |
|||||||||||
A−1 . По определению A−1 A = E . По свойству 15˚ операции умножения |
|||||||||||
матриц det( A−1 A) = det E , |
det A−1 det A = det E =1 det A ≠ 0 , то есть мат- |
||||||||||
рица A не вырожде а. |
|
|
|
|
|
|
|
|
|
|
|
2. |
Доказательство существования (достаточность). Пусть матрица A |
||||||||||
не вырождена. Н йдем вид элементов |
A−1 , для чего вычислим произве- |
||||||||||
дение |
|
|
|
|
|
|
|
|
|
|
|
|
C = A ( A )T = (aij ) (Aij )T , |
|
|||||||||
|
n |
|
|
n |
|
|
det A, |
i = j |
|||
|
cij = ∑aik ( AT )kj = ∑aik Ajk |
||||||||||
|
= |
|
|
|
|||||||
|
k =1 |
|
|
k =1 |
|
|
0, i ≠ j |
||||
Скачано |
|
|
|
|
|
|
|
|
|
|
|

18 |
т.е. |
A ( A )T = det A E . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
Лекции 1-2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
det A |
|
0 |
... |
0 |
|
|
1 |
|
|
|
|
0 ... |
0 |
|
|
|
|||||||||
|
|
|
|
|
det A |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|||||
|
откуда C = |
0 |
... |
0 |
= det A 0 |
|
|
|
|
1 ... |
|
= det A E , |
|||||||||||||||
|
|
|
|
|
0 |
||||||||||||||||||||||
|
|
|
|
|
|
... |
... |
... |
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||||
|
|
... |
|
|
|
... |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
0 |
|
0 |
... |
det A |
|
0 |
|
|
|
|
0 |
|
|
1 |
|
|
|
|||||||
|
Так как det A ≠ 0 , A |
|
( A )T |
= E и A |
−1 |
1 |
( A |
|
) |
T |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
= |
|
|
|
. |
|
|
|
|
|
|
|||||||||||||
|
|
det A |
|
det A |
|
|
|
|
|
|
|
||||||||||||||||
|
3. |
Доказательство единственности (от противного). Предположим, что |
|||||||||||||||||||||||||
|
кроме матрицы A−1 , |
для которой A−1 A = E , существует матрица B , для |
|||||||||||||||||||||||||
|
которой также B A = E , |
причем |
B ≠ A−1 . Вычтем из одного равенства |
||||||||||||||||||||||||
|
другое: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A−1 A − B A = E − E = , ( A−1 − B) A =. |
|
|
|
||||||||||||||||||||
|
Умножив последнее равенство на A−1 |
справа, получим: |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
( A−1 − B) AA−1 = A−1 = . |
|
|
|
|
|
|||||||||||||||
|
Так как A A−1 = E , |
( A−1 − B)E = , A−1 − B = , |
A−1 = B , что противоре- |
||||||||||||||||||||||||
|
чит B ≠ A−1 . Предположение неверноantigtu, обратная матрица единственна. |
||||||||||||||||||||||||||
|
Скачано |
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
! |
1˚. |
(A−1 )−1 = A . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2˚. (α A)−1 = |
1 |
A−1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3˚. (A× B)−1 = B−1 × A−1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
4˚. (A−1 )T = (AT )−1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Алгоритм н хождения обратной матрицы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1. |
Находим det A , проверяем det A ≠ 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
2. |
Находим M ij |
- все миноры матрицы A . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
3. |
Определяем |
A = (−1)i+ j M |
ij |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4. |
Строим м трицу алгебраических дополнений |
|
A = (Aij |
) |
и транспониру- |
||||||||||||||||||||||
|
ем: ( A )T = (Aji ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Делим каждый элемент матрицы на det A : A |
−1 |
|
|
|
|
|
1 |
|
|
|
T |
|
|
|||||||||||||
5. |
|
= |
|
( A |
) |
|
. |
|
|||||||||||||||||||
|
det A |
|
|
||||||||||||||||||||||||

Определители и матрицы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
19 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Найти матрицу, обратную для матрицы A = |
1 |
2 |
|
. |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. det A = 4 − 6 = −2 ≠ 0 . |
|
|
|
antigtu |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
2. M11 = 4, M12 = 3, M 21 = 2, M 22 |
=1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
3. A11 |
= 4, A12 = −3, A21 |
= −2, A22 |
=1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
4 |
−3 |
|
|
) |
T |
4 |
−2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
4. A |
= |
|
|
|
|
|
, ( A |
|
= |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
−2 |
1 |
|
|
|
|
−3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
5. A−1 = − |
|
1 |
|
4 |
−2 |
|
|
−2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
−3 |
|
|
|
3 / 2 −0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Проверка: |
|
|
1 2 −2 |
|
1 −2 +3 1−1 1 0 |
|
= E . |
||||||||||||||||||||||
|
|
|
|
|
|
A A−1 = |
3 |
|
|
|
|
|
|
= |
|
|
3 − 2 |
|
= |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 1,5 |
−0,5 |
−6 +6 |
|
|
0 1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.3. Решение матричных уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
О |
Если A , B - известные матрицы, а X |
– неизвестная, то равенство вида |
||||||||||||||||||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
A X = B называется матричным уравнением. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Основные типы матричных уравнений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
1. |
A X = B . Матрица A д лжна быть квадратной, |
A |
≠ 0. Умножим уравне- |
||||||||||||||||||||||||||||||||
|
|
ние на A−1 слева: A−1 A X = A−1B , E X = A−1B , |
X = A−1B . |
|
|
|
|
|
|
||||||||||||||||||||||||||
2. |
X A = B . Матрица A долж а быть квадратной, |
A |
≠ 0. Умножим уравне- |
||||||||||||||||||||||||||||||||
|
|
ние на A−1 спр ва: |
|
X AA−1 = B A−1 X = B A−1 . |
|
|
|
A |
|
≠ 0, |
|
B |
|
≠ 0 . |
|||||||||||||||||||||
3. |
A X B = C . М трицы A и B должны быть квадратными, |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
Умножим на A−1 слева: A−1 A X B = A−1C X B = A−1C . Умножим на |
|||||||||||||||||||||||||||||||||
|
|
B−1 справа: X B B−1 = A−1C B−1 X = A−1 C B−1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Решить матричное уравнение: |
A X = B , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
1 |
2 |
B = |
|
3 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
где A = |
3 |
|
4 |
; |
|
5 |
9 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
ru |
Лекции 1-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
X = A |
−1 |
B , A |
−1 |
|
|
1 |
|
|
T |
−2 |
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
= |
|
|
|
|
( A ) |
= |
|
−0,5 |
, |
|
|
|
|
|
||
|
|
|
det |
A |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|
|
||||||
r (A)= r |
(B). |
− 2 |
|
1 |
3 5 −1 |
−1 |
|
−1 −1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
= |
antigtu |
|
|
|
|
||||||
|
A−1 B = |
|
|
|
|
|
, |
X = |
|
|
|
|
|||||||
|
|
|
− 0,5 |
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|||
|
|
1,5 |
|
|
5 9 |
|
3 |
|
3 |
|
|
|
|||||||
2.4. Ранг матрицы. Метод окаймляющих миноров. |
|
|
|||||||||||||||||
Элементарные преобразования матриц |
|
|
|
|
|
||||||||||||||
Пусть в матрице A размерности (m ×n) выбраны k |
строк и k столбцов, |
||||||||||||||||||
причем k ≤ min (m,n). Тогда элементы, |
стоящие на пересечении выбранных |
||||||||||||||||||
строк и столбцов, образуют квадратную матрицу k -го порядка. Определитель Mk этой матрицы называется минором k -го порядка матрицы A .
О |
|
Рангом матрицы A называется число, равное максимальному порядку |
|
|
|
r отличных от нуля миноров M k этой матрицы: |
|
|
|
||
|
|
|
с |
|
|
r = r (A)= r ng A. |
|
О |
|
Матрицы называются эквивалентными, что обозначается A B , если |
|
|
|
Ранг матрицы A вычи ляет я методом окаймляющих миноров или ме- |
|
|
Скачано |
|
|
тодом элементарных преобразований. |
|||
Метод окаймляющих мин р в |
|
||
|
|
Пусть в матрице A элемент aij ≠ 0 , тогда M1 ≠ 0 и r (A)≥1. Окаймляем |
|
этот элемент элеме тами ( j +1)-го столбца и (i +1)-й строки, получаем минор 2-го порядка:
M2 = |
ai, j |
ai, j+1 |
. |
|
ai+1, j |
ai+1, j+1 |
|
Если M2 = 0 , то присоединяем другие строки и столбцы, перебирая все возможные миноры 2-го порядка. Если все миноры второго порядка равны нулю, то r (A)=1; если же существует хотя бы один минор 2-го порядка, отличный от нуля, то r (A)≥ 2 .
Выбираем отличный от нуля минор 2-го порядка M2 и окаймляем его
элементами соседних строк и столбцов до минора 3-го порядка и так до тех пор, пока не будет выполнено условие: Mr ≠ 0 , но все Mr+1 = 0 .

|
Определители и матрицы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
21 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
−1 |
1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
Найти ранг матрицы A = |
2 |
− 2 |
2 . |
|
|
|
|
|
||||||||||||
|
|
|
отбрасывание нулевой |
троки ( толбцаantigtu) матрицы. |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
|
1 −1 |
|
|
|
|
|
2 |
|
−1 1 |
|
|
|
||||
|
|
|
|
|
|
M1 =1; |
M 2 |
= |
2 −2 |
= −2 + 2 = 0 , M |
2 = |
|
−2 2 |
= −2 + 2 = 0 , |
|
|
|
||||||||
|
|
|
|
|
|
M23 = |
2 −2 |
= 2 + 2 = 4 ≠ 0 ; M 3 = |
1 |
−1 |
1 |
= 0 r( A) = 2 . |
|
|
|
||||||||||
|
|
|
|
|
|
2 − 2 2 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
1 |
−1 |
−1 |
|
|
|
|
|
|
||
|
Метод элементарных преобразований |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
К элементарным преобразованиям матрицы относятся следующие: |
|
|
|
|||||||||||||||||||||
|
|
|
|
транспонирование; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
перестановка строк (столбцов); |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
умножение строки (столбца) на число α ≠ 0 ; |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прибавление к элементам строки (столбца) матрицы элементов другой |
|||||||||||||||||||||
|
|
|
|
|
строки, умноженных на некоторое число; |
|
|
|
|
|
|||||||||||||||
|
|
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Т |
|
Элементарные преобразования матрицы не меняют ее ранга. |
|
|
|
||||||||||||||||||
|
|
|
|
Для определения ранга матрицы A методом элементарных преобразова- |
|||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||
1. |
|
ний следует: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Переставить стр ки так, чт бы в верхнем левом углу матрицы был нену- |
||||||||||||||||||||||||
|
|
|
|
левой элемент. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. |
|
Все элементы первого столбца, кроме a11 , обратить в ноль: |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
a |
... |
a |
|
a |
|
|
a |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
11 |
|
|
1n |
|
|
11 |
|
|
|
|
1n |
|
|
|
|
|
|
|
|
|
|
|
|
A = |
|
... |
a |
|
|
0 |
|
|
a |
|
. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
a |
|
|
0 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
m1 |
|
|
mn |
|
|
|
|
|
|
mn |
|
|
|
||
3. Повторить операцию со второй строкой: во втором столбце должен быть ненулевой элемент, после чего все элементы второго столбца, кроме a12
и a22 , обр тить в ноль.
О онч тельно после многократного применения указанной процедуры и отбрасывания нулевых строк преобразованная матрица будет иметь вид:
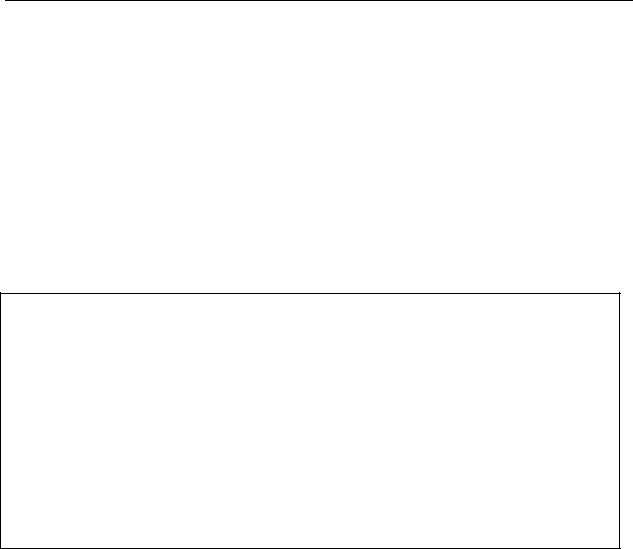
22
a11 |
a12 ... |
a1,r−1 |
a1r |
... |
a1n |
|
||||
|
0 |
a |
22 |
... |
a |
2,r−1 |
a |
... |
a |
|
|
|
|
|
|
2r |
|
2n |
|
||
A = ... ... ... |
|
... |
... |
... |
|
|
||||
|
0 |
0 ... |
a |
−1,r−1 |
a |
... |
a |
|
||
|
|
|
|
|
r |
r−1,r |
|
r−1,n |
||
|
0 |
0 ... |
|
0 |
a |
... |
a |
|
||
|
|
|
|
|
|
|
rr |
|
rn |
|
Тогда ранг матрицы A = r (A) = rang A = rang A.
В результате изучения материала, изложенного в этих лекциях, у студентов должны сформироваться следующие понятия:
|
матрица - таблица, |
|
|
|
определитель - число, |
|
|
|
ранг матрицы - число, |
|
|
|
минор, |
|
|
|
алгебраическое дополнение. |
|
|
Студент должен уметь: |
с |
|
|
|
вычислять определители 2-го, 3-го и n -го порядков, |
||
|
перемножать матрицы, |
|
antigtu |
|
находить обратную матрицу, |
||
|
определять ранг матрицы, |
|
|
|
решать матричные уравнения. |
|
|
Скачано |
|
|
|
. |
ru |
Лекции 1-2

Лекция 3 СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
В лекции 3 излагаются элементы теории систем линейных уравнений Системы ли-
ретической физики и т.д. Матричное исчисление позволяет в компактной форме получить решение таких систем. Реальные задачи, содержащие большое количество переменных (десятки и сотни), требуют владения этими методами.
нейных уравнений возникают при решении многих задач механики, электротехники, тео- |
||
antigtu |
. |
ru |
3.1. |
Системы m линейных уравнений с n неизвестными. |
|
|||||
|
Основные определения |
|
|
|
|||
3.2. |
Системы n линейных уравнений с n неизвестными. |
|
|||||
|
Матричный метод решения. Правило Крамера. Метод Гаусса |
|
|||||
|
(метод последовательного исключения переменных) |
|
|||||
|
3.2.1. Системы n-линейных уравнений с неизвестными |
|
|||||
|
3.2.2. Правило Крамера |
|
|
|
|||
|
3.2.3. Метод Гаусса |
|
|
|
|||
3.3. |
Теорема Кронекера - Капелли |
|
|
||||
3.4. Однородные системы линейных уравнений |
|
||||||
3.5. |
|
|
|
с |
|
|
|
Схема отыскания общего решения системы m уравнений |
|
||||||
|
с n неизвестными |
|
|
|
|
||
3.6.* Фундаментальная |
и тема решений |
|
|
||||
Скачано |
|
|
|
|
|
||
3.1. Системы m линейных уравнений с n неизвестными. |
|
||||||
Основные определения |
|
|
|
||||
Рассмотрим систему ли ей ых уравнений (СЛУ), содержащую m урав- |
|||||||
нений и n неизвестных: |
|
|
|
|
|
||
|
|
a11x1 + a12 x2 +…+ a1n xn = b1, |
|
|
|||
|
|
a21x1 + a22 x2 +…+ a2n xn = b2 , |
|
||||
|
|
…………………………………, |
(1) |
||||
|
|
|
|
|
|
|
|
|
|
a x |
+ a x |
+…+ a x = b . |
|
||
|
|
m1 1 |
|
m2 2 |
mn n |
m |
|
где aij , i =1,..., m; |
j =1,...,n |
- |
коэффициенты системы, bi , i =1,..., m |
- сво- |
|||
бодные члены, xj , |
j =1,...,n - неизвестные. |
|
|
||||
Система может быть записана в матричном виде: |
A X = B , |
|
|||||
24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лекция 3 |
|
|
|
|
|
|
|
|
a11 |
|
|
|
|
|
a12 |
|
... |
a1n |
|
|
|
|
|
|
|
|
|
где |
A = (a |
) |
|
|
a |
|
|
|
|
|
a |
|
... |
a |
|
- основная матрица системы, |
|||||||
|
m,n |
= 21 |
|
|
|
|
22 |
|
|
2n |
|
|||||||||||||
|
|
|
ik |
|
|
|
|
|
|
|
|
|
|
... |
... |
|
|
|
|
|
. |
ru |
|
|
|
|
|
|
|
|
|
... ... |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
am1 |
|
|
|
|
am2 |
|
... |
amn |
m,n |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
B = (b ) |
|
|
|
|
- матрица-столбец свободных членов, |
||||||||||||||
|
|
|
|
|
m,1 |
= |
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bm m,1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
X = (x |
) |
|
x |
|
- матрица-столбец неизвестных. |
|
|||||||||||||
|
|
|
|
|
n,1 |
= |
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xn ,1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
Например, первое уравнение системы получено умножением первой |
|||||||||||||||||||||
|
|
|
строки матрицы A на столбец неизвестных: a11x1 + a12 x2 +... + a1n xn = b1 . |
|||||||||||||||||||||
|
О |
|
Матрица, полученная из матрицы |
A добавлением столбца свободных |
||||||||||||||||||||
|
|
|
членов, называется расширенной матрицей системы: |
|
|
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a11 |
a12 |
... |
a1n |
|
b1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
... |
a |
|
b |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
22 |
|
2n |
|
2 |
|
. |
|
|
|
|
|
|
|
|
A = (A |
|
B)= с... |
... |
... |
... |
|
... |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
... |
a |
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
m2 |
|
mn |
|
m |
m,n+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
О |
|
Упорядоче |
|
ое |
|
м ожество |
из |
n |
величин |
|
x1 = c1 , |
x2 = c2 , … xn = cn |
|||||||||||
|
|
|
называется реше ием СЛУ, |
если при подстановке этих чисел в систему |
||||||||||||||||||||
|
|
|
уравнения превращаются в тождества. Решение может быть записано в |
|||||||||||||||||||||
|
|
|
виде м трицы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X = (ck )n,1 = ... |
. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
n,1 |
|
|
|
|
|
|
|
|
|
Система ур внений называется совместной, если она имеет хотя бы од- |
|||||||||||||||||||||
|
О |
|
||||||||||||||||||||||
|
|
|
но решение, и несовместной, если у нее нет ни одного решения. |
|
||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||
|
|
|
Система называется определенной, если она имеет единственное реше- |
|||||||||||||||||||||
|
О |
|
||||||||||||||||||||||
|
|
|
ние, и называется неопределенной, если она имеет бесконечное множе- |
|||||||||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
ство решений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||

Системы линейных уравнений |
|
|
|
|
|
ru |
25 |
|||||
|
|
|
|
|
|
|||||||
О |
Система линейных уравнений (1) |
называется неоднородной, если мат- |
||||||||||
|
рица B не является нуль−матрицей , |
|
. |
|
если |
|||||||
|
и называется однородной, |
|||||||||||
|
B = . |
|
|
|
|
|
antigtu2 |
|
|
|||
! |
|
|
|
|
|
1 |
|
|
||||
Однородная система всегда имеет |
нулевое (так называемое тривиаль- |
|||||||||||
|
ное) решение: x1 = x2 =... = xn = 0 . |
|
|
|
|
|
|
|||||
|
Например, |
|
|
|
|
|
|
|
|
|
|
|
1). |
Система x1 + x2 =1 |
несовместна, решений нет; |
|
|
||||||||
|
|
x1 + x2 = 2 |
|
|
|
|
|
|
|
|
||
2). |
Система x1 + x2 =1 |
совместна, но не определена, так как имеет беско- |
||||||||||
|
|
x1 + x2 =1 |
|
|
|
|
|
|
|
|
||
|
нечное множество решений: x =1−c, x = c |
или (в матричной форме) |
||||||||||
|
1 − c |
|
|
|
|
|
|
|
|
|
|
|
|
X = |
, где c - произвольная постоянная; |
|
|
||||||||
|
c |
|
|
|
|
|
|
|
|
|
|
|
3). |
Система x1 + x2 =1 |
, совместна и определена, так как имеет единствен- |
||||||||||
|
|
x1 − x2 =1 |
|
с |
|
|
|
|
|
|
||
|
ное решение: x1 =1, |
x2 = 0 |
|
). |
|
|
|
|||||
|
(или X = 1 |
|
|
|
||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
3.2. Системы n линейных уравнений с n неизвестными. |
|
|||||||||||
|
Скачано |
|
|
|
|
|
|
|
||||
|
Матричный метод решения. Правило Крамера. |
|
|
|||||||||
|
Метод Гаусса (мет д п следовательного исключения |
|
||||||||||
|
переменных) |
|
|
|
|
|
|
|
|
|
||
3.2.1. Системы n ли ей ых уравнений с n неизвестными |
|
|
||||||||||
Т |
Система n линейных уравнений с n неизвестными имеет единственное |
|||||||||||
|
решение, если определитель основной матрицы A отличен от нуля. |
|
||||||||||
|
Доказательство: |
|
|
|
|
|
|
|
|
|
||
|
Запишем систему уравнений в матричном виде: A X = B , где |
|
||||||||||
|
a11 ... |
a1n |
|
x1 |
b1 |
|
||||||
|
A = ... ... |
... , X = (xi )n,1 |
= ... , |
B = (bk )n,1 = ... . |
(2) |
|||||||
|
a |
... |
a |
|
|
x |
|
b |
|
|
||
|
|
n1 |
|
nn n,n |
|
|
n |
n,1 |
n |
n,1 |
|
|
|
Пусть det A ≠ 0, тогда существует обратная матрица A−1 , A−1 A = E . |
|
||||||||||
|
Умножим уравнение слева на A−1 : |
A−1 A X = A−1B , X = A−1 B . |
|
|||||||||
26 |
|
|
|
|
|
|
ru |
Лекция 3 |
|
|
|
|
|
|
|
|
|||
|
|
1. Если система n уравнений с n неизвестными имеет отличный от нуля |
|||||||
|
С |
||||||||
|
|
определитель, она может быть решена матричным методом. |
|
||||||
|
|
|
|||||||
|
|
Например, система x1 + x2 =1 в матричном виде выглядит как |
|
||||||
|
|
x1 − x2 =1 |
antigtu |
. |
|
|
|||
|
|
|
|
|
|
|
|||
|
|
1 |
1 |
x |
|
1 |
|
|
|
|
|
|
|
1 |
|
= . |
|
|
|
|
|
1 |
−1 |
x2 |
1 |
|
|
|
|
1 |
1 |
, det A = −2 |
≠ 0 , |
A |
−1 |
|
− |
1 −1 |
−1 |
, |
||
A = |
|
|
= |
|
−1 |
1 |
|
|||||
1 |
−1 |
|
|
|
|
|
|
2 |
|
|
||
x1 |
|
1 −1 |
−1 1 |
1 |
|
|||||||||
X = = − |
|
|
|
= . |
|
|||||||||
x2 |
|
2 −1 1 1 |
0 |
|
||||||||||
2. Если однородная система |
|
|
уравнений с |
неизвестными имеет от- |
||||||||||
личный от нуля определитель основной матрицы системы, то у нее су- |
||||||||||||||
ществует только нулевое (тривиальное) решение. |
|
|||||||||||||
Для однородной системы |
B = ; A X = . |
Так как существует A−1 , |
то |
|||||||||||
X =A−1 = . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.2.2. Правило Крамера |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначим через ∆ - определитель |
основной матрицы системы |
(2) |
||||||||||||
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
(главный определитель системы) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆ = det A = |
|
A |
|
= |
|
a11 |
... |
a1n |
|
|
|
|
||
|
|
|
|
|
|
|||||||||
|
|
|
... |
... |
... |
|
, |
|
|
|||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
an1 |
... |
ann |
|
|
|
|
∆i - i-й вспомог тельный определитель системы (2), получается из ∆ заме-
ной i -го столбца на столбец свободных членов, |
|
|
|
|||||||||||
Скачано |
a11 |
... a1,i−1 |
b1 |
a1,i+1 |
... |
a1n |
|
|||||||
|
|
|
|
|
|
|
|
|||||||
∆ |
i |
= |
|
A |
|
= |
a21 |
... |
a2,i−1 |
b2 |
a2,i+1 |
... |
a2n |
. |
|
|
|||||||||||||
|
|
|
i |
|
|
... ... ... ... ... ... ... |
|
|||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
an1 |
... |
an,i−1 |
bn |
an,i+1 |
... |
ann |
|

|
Системы линейных уравнений |
|
27 |
|
|
ru |
|
||
. |
|
|||
Т Если главный определитель системы линейных уравнений не равен нулю, то система совместна и определена, причём единственное решение
(x1, x2 ,…, xn ) вычисляется по формулам Крамера:
По теореме о разложении определителя по столбцу сумма в круглых скобках – это определитель матрицы Ai , которая отличается от матрицы
|
|
x = |
∆1 , x = |
∆2 , … , x = |
∆n . |
|
|
|
|
|
|
|||||||||||
|
|
1 |
|
∆ |
|
2 |
∆ |
|
n |
∆ |
|
|
|
|
|
|
|
|
||||
Доказательство: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
(V ) |
T |
|
Матрица, обратная к матрице |
коэффициентов: A |
|
= |
|
( A ) |
, ее |
||||||||||||||||
|
det A |
|||||||||||||||||||||
V |
1 |
|
|
|
|
i+ j |
|
|
−1 |
= (q j ) , q j = |
|
(−1)i+ j |
M ji |
|
|
|
||||||
элементы A ij = |
|
|
|
(−1) |
|
|
Mij , |
A |
|
|
|
|
|
|
. |
|
|
|||||
det |
A |
|
|
|
|
det A |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Запишем элемент произведения X = A−1 B : |
|
|
|
|
|
|
|
|
|
|
||||||||||||
n |
|
|
|
|
n |
|
(−1)i+k |
M |
ki |
|
1 |
|
|
|
n |
|
i+k |
|
|
|
|
|
xi = ∑qikbk = ∑ |
|
|
|
bk = |
|
|
|
∑(−1) |
|
bk Mki . |
|
|||||||||||
|
det A |
|
|
|
|
|
||||||||||||||||
k =1 |
|
|
|
|
k =1 |
|
|
|
|
det A k =1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|||||||
A тем, что i-й столбец заменен на столбец свободных членов.
Таким образом, |
x = ∆i . |
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
i |
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скачано |
2x1 |
+3x2 |
+ 2x3 = 9, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Решить систему: |
x + 2x + 3x |
=14, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
3x + 4x |
+ x |
=16. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
По формулам Крамера: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2 |
3 |
2 |
|
|
|
|
|
|
|
9 |
3 |
|
2 |
|
|
|
|
|
|
2 |
9 |
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
∆ = |
|
1 |
2 |
−3 |
|
= −6 ≠ 0, ∆1 = |
|
14 |
2 |
|
−3 |
|
= −12, |
∆2 |
= |
|
1 |
14 |
−3 |
|
= −18, |
|||||||
|
|
3 |
4 |
1 |
|
|
|
|
|
|
|
16 |
4 |
|
1 |
|
|
|
|
|
|
3 |
16 |
1 |
|
|
|||
|
|
2 |
3 |
9 |
|
=12. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
∆3 = |
|
1 |
2 |
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
3 |
4 |
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Вычислим значения неизвестных: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
x = |
∆1 = 2 , x = |
∆2 |
= 3 |
, x = |
∆3 |
= −2 . |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
∆ |
2 |
∆ |
|
|
|
3 |
∆ |
|
|
|
|
|
|
|
|||

28 Лекция 3
3.2.3. Метод Гаусса (метод последовательного исключения неизвестных)
Рассмотрим систему n уравнений с n неизвестными (2). Данная система с помощью элементарных преобразований приводится к эквивалентной сис-
теме, решение которой находится проще. |
|
|
|
|
|
|
Элементарными преобразованиями системы являются следующиеru |
: |
|
||||
|
перемена местами двух любых уравнений системы; |
. |
|
|
|
|
|
|
|
|
|
||
|
умножение любого уравнения системы на произвольное число k ≠ 0 ; |
|||||
|
antigtu |
|
|
|
|
|
|
прибавление к одному уравнению системы другого уравнения, умно- |
|||||
|
женного на произвольное число k ≠ 0 . |
|
|
|
|
|
! |
1). Элементарным преобразованиям уравнений соответствуют элемен- |
|||||
|
тарные преобразования строк расширенной матрицы системы |
A |
= (A |
B). |
||
2). Элементарные преобразования матрицы не изменяют ее ранга. 3). Метод Гаусса справедлив и для произвольных систем ( m ×n ).
Метод Гаусса предполагает следующий алгоритм:
|
|
|
a |
|
|
с |
|
x |
= b |
|
|
|
|
|||
|
|
|
x +... + a |
|
|
|
|
|||||||||
|
|
|
11 |
1 |
|
1n |
|
n |
1 |
|
|
|
|
|||
1. Для системы уравнений .............................. |
|
|
|
|
||||||||||||
Скачано |
a |
x |
|
+... + a |
|
x |
= b |
|
|
|
|
|||||
n1 1 |
|
nn |
n |
n |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
записывают расширенную матрицу системы: |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
a11 |
a12 |
|
|
... |
a1n |
|
b1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
a |
a |
|
|
... |
a |
|
b |
|
|
A = (A |
|
B)= |
21 |
22 |
|
|
|
2n |
|
2 |
|
|||||
|
... ... |
|
|
... ... |
|
... . |
||||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
a |
|
|
... |
a |
|
b |
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|||||
|
|
|
|
|
|
|
n1 |
n2 |
|
|
nn |
|
n |
n,n+1 |
||
|
|
|
|
|
|
|
|
|
|
|||||||
2. Элемент рными преобразованиями строк приводят ее к трапециевидной форме, при этом основн я матрица системы приводится к верхнему тре-
угольному виду.
3. Возвращаясь к системе уравнений, определяют все неизвестные.
Пример:
x1 + x2 + x3 = 6
Решить систему 2x1 − x2 + x3 = 3 .
x1 + x2 − x3 = 0
Для удобства будем обозначать строки матрицы αi , а столбцы – β j .

|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
1 |
|
|
2 |
|
ru |
29 |
|
|
Системы линейных уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 1 |
1 |
6 |
|
α2 − 2α1 |
1 1 1 |
|
6 |
|
|
|
||||||||||||||
|
|
|
|
2 |
−1 |
1 |
3 |
|
|
|
0 |
−3 −1 |
|
−9 |
|
|
|
|
|||||||||
|
|
|
|
|
α |
|
|
− |
α |
|
|
|
, вернемся к системе урав- |
||||||||||||||
|
|
|
|
1 1 −1 |
0 |
|
|
3 |
1 |
|
0 0 −2 |
|
−6 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
||||||
|
|
|
нений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
x |
+ x |
|
|
+ x |
|
|
|
= 6 |
x |
+ x |
+ 3 = 6 |
|
||||||||||||
|
|
|
|
|
− 3x2 |
− x3 |
|
|
= −9 |
− 3x2 |
− 3 |
.= −9 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
− 2 x3 |
|
= −6 |
|
|
|
|
x3 |
= 3 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
x |
+ 5 = 6 |
|
x |
=1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 = 2 |
|
|
|
x2 = 2 . |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
= 3 |
|
|
|
|
|
|
= 3 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
x3 |
|
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Употребляется также расширенный метод Гаусса, |
или метод Гаусса – |
||||||||||||||||||||||||
|
! |
||||||||||||||||||||||||||
|
|
Ньютона. В нем основная матрица системы элементарными преобразо- |
|||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
ваниями строк преобразуется к диагональному виду, пункт 2 предыдущей схемы (так называемый прямой ход) дополняется обратным ходом
– преобразованием верхней треугольной матрицы к диагональной. Для предыдущего примера это будет выглядеть так:
1 |
1 1 |
|
6 |
1 1 1 |
|
6 |
1 |
1 0 |
|
3 |
|||||||||
|
|
|
|||||||||||||||||
0 |
−3 −1 |
−9 |
0 −3 −1 |
|
−9 |
0 |
−3 0 |
|
−6 |
||||||||||
|
0 |
−2 |
|
−6 |
|
|
|
|
|
|
|
|
|
|
|
0 1 |
|
3 |
|
0 |
|
|
0 0 1 |
|
3 |
0 |
|
|
|||||||||||
Скачано |
|
|
с |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
1 |
1 0 |
|
3 |
1 0 0 |
1 |
|
||||||||||
|
|
|
0 |
1 0 |
|
2 |
|
|
0 1 0 |
2 |
|
|
|||||||
|
|
|
|
|
|
, |
|
||||||||||||
|
|
|
0 |
0 1 |
|
3 |
|
|
0 0 1 |
3 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
откуда ответ очевиден.
3.3. Теорема Кронекера - Капелли
Р ссмотрим систему m -линейных уравнений с n -неизвестными (1).
В нач ле лекции было показано, что ее можно представить в матричном виде. Будем р ссм трив ть матрицу A размерности m ×n как набор строк αi (столб-
цовβj ):

30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
ru |
Лекция 3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A = α2 |
|
|
или |
|
|
|
A = (β , β |
, ..., β |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
), |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
n |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
αm |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 j |
|
|
|
|
|
|
|
|
|
|
где α |
i |
= (a |
,a |
,...,a ) – матрица - строка; |
β |
j |
= |
a2 j |
- матрица-столбец. |
|||||||||||||||||||||
|
|
|
|
i1 |
i2 |
|
|
in |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mj |
|
|
|
|
|
|
|
|
|
|
|
|
Введем понятие линейной зависимости строк (столбцов) матрицы. |
||||||||||||||||||||||||||||
|
|
|
Линейной комбинацией строк называется выражение вида: |
|
|||||||||||||||||||||||||||
|
О |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
λα + λ α |
+ ... + λ α |
= |
k |
λα |
|
= |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
2 2 |
|
|
|
k k |
|
∑ i |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= λ1 (a11 a12 ... a1n )+λ2 (a21 a22 ... a2 |
|
|
)+ ... + λk (ak1 ak 2 ... akn ). |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
Строки матрицы α1, α2 , ..., |
αk |
называют |
линейно зависимыми, если |
|||||||||||||||||||||||||
|
|
|
существует такой набор чисел λ1, λ2 , ..., λk , не равных одновременно ну- |
||||||||||||||||||||||||||||
|
|
|
лю, при которых линейная комбинация строк обращается в ноль: |
|
|||||||||||||||||||||||||||
|
|
|
Скачано |
|
λ1α1 + λ2α2 + ... + λkαk = 0 . |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Т |
|
Строки матрицы являются линейно зависимыми, если одна из них явля- |
||||||||||||||||||||||||||||
|
|
|
ется линейной к мбинацией |
|
стальных: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
α |
k |
= λα + λ α |
+ ... + λ α |
|
+ λ |
α |
+1 |
+ ... + λ α |
. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
1 1 |
|
2 2 |
|
|
|
k −1 k −1 |
|
|
k +1 k |
|
|
|
|
n n |
|
|
|||||||
|
|
Действиям |
|
ад строками матрицы соответствуют действия над уравне- |
|||||||||||||||||||||||||||
|
! |
|
|
||||||||||||||||||||||||||||
|
|
|
ниями системы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Пусть м трица A р змерности (m×n) |
|
имеет ранг r . Отличный от нуля |
||||||||||||||||||||||||||
|
О |
|
|
||||||||||||||||||||||||||||
|
|
|
минор порядка r , составленный из элементов матрицы A , называется |
||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||
|
|
|
базисным минором матрицы A . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Неизвестные, коэффициенты перед которыми входят в базисный минор, |
||||||||||||||||||||||||||||
|
О |
|
|||||||||||||||||||||||||||||
|
|
|
называются базисными неизвестными. Неизвестные, не являющиеся ба- |
||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||
|
|
|
зисными, н зываются свободными. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Теорема о б зисном миноре. Если матрица (m×n) имеет ранг r , то су- |
||||||||||||||||||||||||||||
|
Т |
|
|||||||||||||||||||||||||||||
|
|
|
ществуют r |
таких строк (столбцов), что все остальные строки (столбцы) |
|||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||
|
|
|
являются линейными комбинациями данных. Из элементов, входящих в |
||||||||||||||||||||||||||||
|
|
|
эти строки (столбцы), можно построить базисный минор матрицы. |
||||||||||||||||||||||||||||
! Базисных миноров может быть много, но ранг определяется одно-
|
Системы линейных уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
|
значно. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1). Строки (столбцы), входящие в базисный минор, линейно независимы. |
||||||||||||||||||||||||||||||||||||||
|
С |
|||||||||||||||||||||||||||||||||||||||
|
|
2). Все строки (столбцы) матрицы, не входящие в базисный минор, |
||||||||||||||||||||||||||||||||||||||
|
|
Так как добавление столбца B |
в множе твоantigtu{β ,..., β } не увеличивает количество |
|||||||||||||||||||||||||||||||||||||
|
|
линейно зависимы с базисными. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
3). Число линейно независимых строк матрицы равно числу линейноru |
не- |
|||||||||||||||||||||||||||||||||||||
|
|
зависимых столбцов и равно рангу r . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|||||||||||||||||||
|
|
4). rang (A)≤ min (m,n). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Т |
Теорема Кронекера - Капелли. Для того чтобы система m уравнений с |
||||||||||||||||||||||||||||||||||||||
|
|
n неизвестными была совместной, необходимо |
|
и достаточно, чтобы |
||||||||||||||||||||||||||||||||||||
|
|
ранг основной матрицы системы равнялся рангу расширенной матрицы: |
||||||||||||||||||||||||||||||||||||||
|
|
Доказательство*: |
|
|
|
|
|
|
|
|
r(Α) = r (Α |
Β). |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Достаточность. Пусть r(Α) = r(Α |
|
Β). Рассмотрим столбцы матрицы A и |
|
: |
|
|||||||||||||||||||||||||||||||||
|
|
|
A |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
b |
|
|
||||||||||
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
||||||||
|
|
β |
|
= |
a21 |
, … , β |
|
= |
2n |
|
, |
B = |
. |
|
||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
с |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
a |
mn |
|
|
|
|
|
|
b |
|
|
|||||||||||||
|
|
|
|
|
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
линейно независимых столбцов, |
толбец B есть линейная комбинация столбцов ос- |
|||||||||||||||||||||||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
новной матрицы, т.е. суще твуют такие x1, x2 ,…, xn ≠ 0 , что |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
B = x1β1 + x2β2 +…+ xn βn , |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
a |
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
||||||||||
|
|
|
1 |
= x |
|
|
11 |
|
|
+ x |
2 |
|
12 |
|
+... |
+ x |
n |
|
1n |
. |
|
|||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
b |
|
|
|
|
|
a |
m1 |
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|||||||
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
|
|
|
|
|
|
|
|
|
|
mn |
|
||||||||||||
|
|
|
|
|
b |
= a |
|
x +... + a |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Записывая последнее в виде |
|
|
1 |
|
|
|
|
|
11 |
1 |
|
|
|
|
|
1n |
|
n |
|
, |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
b |
|
|
= a |
m1 |
x +... + a |
mn |
x |
n |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
убеждаемся в том, то x1, x2 ,…, xn - решение системы, система совместна. |
|
|||||||||||||||||||||||||||||||||||||
|
|
Необходимость. Пусть система совместна, x1, x2 ,…, xn - решение системы. |
|
|||||||||||||||||||||||||||||||||||||
|
|
З писыв я систему в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
b |
|
|
|||||||||||||||
|
|
|
11 x |
+ |
|
|
|
12 |
x |
2 |
+... |
+ |
|
|
|
1n |
x |
n |
|
= |
1 |
, |
|
|||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
a |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
b |
|
|
|
|||||||||||
|
|
|
m1 |
|
|
|
|
|
|
m2 |
|
|
|
|
|
|
|
|
|
mn |
|
|
|
|
|
m |
|
|||||||||||||
x1β1 + x2β2 +…+ xn βn = B ,
32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
Лекция 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
видим, чтоB является линейной комбинацией β1,..., βn , добавление столбца свобод- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
ных членов не увеличивает ранга матрицы, r( A) = r( A) . |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
Итак, если r(Α) ≠ r (Α |
|
Β), то система заведомо не имеет решений; если же |
|||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
r(Α) = r (Α |
|
Β), то возможны два случая: |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1) если r = n , тогда решение единственно; |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
2) если r < n , тогда решений бесконечно много. |
|
|
|
|
|
|
|
|
||||||||||
|
3.4. Однородные системы линейных уравнений |
|
|
|
|
||||||||||||||||
|
|
|
Однородная система имеет вид: |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
a |
x |
+ a |
x +... + a |
x |
= 0, |
|
|
|
|
|
|||||
|
|
|
|
|
|
11 |
1 |
12 |
2 |
1n |
|
n |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
a21x1 + a22 x2 +... + a2 |
|
x |
= 0, |
|
|
|
|
|
|||||||
|
|
|
|
|
|
............................................ |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
x |
+ a |
x + |
... + a |
|
x = 0, |
|
|
|
|
|||||
|
|
|
|
|
|
m1 1 |
m2 2 |
mn |
n |
|
|
|
|
||||||||
|
ей соответствует матричное уравнение Α Χ = . |
|
|
|
|
||||||||||||||||
|
|
|
Однородная система всегда совместна, |
так как r( A) = r( |
|
, поскольку |
|||||||||||||||
|
|
A) |
|||||||||||||||||||
|
нулевой столбец не меняет ранг матрицыantigtu, всегда существует нулевое реше- |
||||||||||||||||||||
|
ние (0, 0, ..., 0) . |
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для того чтобы дн р дная система имела ненулевое решение, необхо- |
|||||||||||||||||||
|
|
|
димо и достат чно, чт бы r( A) < n . |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Доказательство: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1) |
r не может быть больше n (ранг матрицы не превышает числа столб- |
||||||||||||||||||
|
|
|
|
цов или строк); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2) |
r ≠ n , т.к. если r = n , то главный определитель системы ∆ ≠ 0 , и, по |
||||||||||||||||||
|
|
|
|
формул м Кр мера, существует единственное тривиальное решение |
|||||||||||||||||
|
|
|
|
x1 = x2 =... = xn = 0 , что противоречит условию. Значит, r( A) < n . |
|||||||||||||||||
|
|
|
Для того чтобы однородная система n линейных уравнений с n неиз- |
||||||||||||||||||
|
С |
|
|||||||||||||||||||
|
|
|
вестными имела ненулевое решение, необходимо и достаточно, чтобы |
||||||||||||||||||
|
|
|
|||||||||||||||||||
|
|
|
∆ = 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Системы линейных уравнений |
33 |
3.5. Схема отыскания общего решения системы m уравнений с n неизвестными
входят в общий базисный минор. Остальные уравнения являются линейными комбинациями этих уравнений и не несут дополнительной информации.
1. Находим ранги матриц A и (A |
|
B). |
|
|
ru |
|
|
|
|
||||
|
|
|
|
|
|
|
|||||||
Если r(Α) ≠ r (Α |
|
|
Β ), то система не имеет решений. |
|
|
(A |
|
B) |
|||||
|
|
|
|
||||||||||
Если r(Α) = r (Α |
|
Β )= r , то у системы есть решения. У матриц A |
и |
|
|||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
есть общий базисный минор. Выбираем его. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||
2. Оставляем в системе только те уравнения, коэффициенты которых |
|||||||||||||
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|
3. Сравниваем ранг и количество неизвестных.
Если r = n , то есть порядок базисного минора совпадает с количеством неизвестных, решаем систему n уравнений с n неизвестными (ее определитель ∆ ≠ 0) и получаем единственное решение.
Если r < n , то в системе имеются ( |
− r) |
|
свободных неизвестных. Тогда |
||||||||||||||||||||
x1 , x2 , ..., xr |
– базисные неизвестные, а |
|
xr+1 , |
..., |
xn – свободные неиз- |
||||||||||||||||||
вестные. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переносим свободные неизвестные в правую часть уравнений системы: |
|||||||||||||||||||||||
|
a |
x + a |
x |
+... + a |
x |
= b |
с |
|
x |
|
−... − a |
x , |
|
|
|||||||||
|
|
− a |
|
|
|
||||||||||||||||||
|
11 1 |
|
12 2 |
|
|
1r r |
|
1 |
|
|
1,r+1 r+1 |
|
|
1n n |
|
|
|||||||
|
a21x1 + a22 x2 +... + a2r xr |
= b2 − a2,r+1xr+1 −... − a2n xn , |
(3) |
||||||||||||||||||||
|
........................................................................... |
|
|||||||||||||||||||||
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
x + a |
x |
+... + a x |
= b |
|
− a |
x |
|
|
−... − a |
x . |
|
||||||||||
|
|
r1 1 |
|
r |
2 2 |
|
|
rr r |
|
|
n |
|
|
|
r,r+1 r+1 |
|
|
rn n |
|
|
|||
или, в матричной форме, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
AX r |
= B0 + xr+1B1 + xr+2 B2 +... + xn Bn−r , |
|
(4) |
|||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a11 |
a12 ... |
a1r |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
A = |
a |
a ... |
a |
|
, det A ≠ 0 , |
|
|||||||||||
|
|
|
|
|
|
|
21 |
|
22 |
|
|
|
|
2r |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
... ... |
... |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
ar1 |
ar 2 ... |
arr |
|
|
|
|
|
|
|
||||||
|
|
|
|
x1 |
|
|
b1 |
|
|
|
|
|
|
a1,r+1 |
|
|
|
a1,n |
|
||||
|
|
X |
|
x |
|
B |
b |
|
, B |
|
|
|
a |
|
|
|
B |
a |
|
||||
|
|
|
= |
2 |
, |
= 2 |
|
|
= − 2,r+1 |
, ..., |
= − 2,n . |
||||||||||||
|
|
|
r |
... |
|
0 |
... |
|
|
1 |
|
|
... |
|
|
|
n−r |
... |
|
||||
|
|
|
|
x |
|
|
b |
|
|
|
|
|
|
ar,r+1 |
|
|
|
ar,n |
|
||||
|
|
|
|
|
r |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
34 |
ru |
Лекция 3 |
|
Система (3) является следствием исходной системы (1) и ее решение может
быть найдено любым ранее рассмотренным способом. |
. |
|
||||||||
|
|
|||||||||
Пусть свободные неизвестные принимают значения |
|
|
||||||||
|
xr+2 = c2 |
antigtu |
|
|
||||||
xr+1 = c1 , |
, |
..., |
xn = cn−r |
|
|
|||||
Тогда система (4) принимает вид: |
|
|
|
|
|
|
|
|
|
|
AX r = B0 + c1B1 + c2 B2 +... + cn−r Bn−r |
|
(5) |
||||||||
и базисные неизвестные x1, x2 , |
..., xr |
выражаются определенным образом |
||||||||
через эти значения: xi = xi (c1 , |
c2 , ..., |
|
cn−r ) , |
i =1,2,..., r . |
Решение неодно- |
|||||
родной системы A X = B можно записать в виде матрицы-столбца: |
|
|||||||||
x1(c1, c2 , ..., cn−r ) |
|
|
|
|||||||
x (c , c , ..., c |
−r |
) |
|
|
|
|
||||
2 |
1 |
|
2 |
|
|
|
|
|
|
|
........................... |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
X = xr (c1, c2 , ..., |
c −r ) |
. |
|
|
(6) |
|||||
|
с |
c1 |
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cn−r |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
Поскольку свободные неизвестные могут принимать произвольные числовые значения, то исходная система имеет бесконечно много решений. Выражение (6) называется бщим решением системы (1). Если константам c1, c2 , ..., cn−r придать к нкретные значения, то получим частное решение
системы (1).
Пример:
|
2x |
+3x |
2 |
− x |
3 |
= 2, |
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Решить систему: 7x1 + 4x2 + 2x3 = 8, |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
− 2x2 + 4x3 |
= 5. |
|
|
|
|
|
|
|
|
|
|||||||
|
3x1 |
|
|
|
|
|
|
|
|
|
||||||||||
Рассмотрим расширенную матрицу: |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 3 −1 |
|
2 |
|
|
|
|
|
−1 3 2 |
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
7 4 2 |
|
8 |
|
|
|
~ |
|
2 4 7 |
|
8 |
|
~ |
|||||
(Α |
Β )= |
|
~ |
β3 |
↔ β1 |
|
|
|
||||||||||||
|
|
|
3 −2 4 |
|
5 |
|
|
|
|
|
4 −2 3 |
|
5 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
α2 + 2α1 |
|
−1 |
3 |
2 |
|
2 |
|
|
|
||||||||
|
|
|
|
0 |
10 |
1112 |
|
|
|
|||||||||||
|
|
|
~ α |
|
+ 4α |
~ |
. |
|
|
|||||||||||
|
|
|
|
|
3 |
|
|
1 |
|
0 |
0 |
0 |
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||

Системы линейных уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
35 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Следовательно, r(Α) = 2 |
и r(Α |
|
Β) = 3 . Поскольку r(Α) ≠ r(Α |
|
Β) , система |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
несовместна. Очевидно, что третье уравнение преобразованной системы: |
|||||||||||||||||||||||||||||||||||||||
|
|
|
0 x1 +0 x2 +0 x3 =1 не имеет решений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 − x2 + x3 |
=12, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
2x1 +3x2 − x3 |
=13, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Решить систему |
|
3x2 + 4x3 |
= 5, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
−3x + x |
2 |
|
+ 4x |
3 |
= −20. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Рассмотрим расширенную матрицу: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
1 −1 1 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
1 −1 1 |
|
|
12 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
2 3 −1 |
|
13 |
|
|
α |
|
|
−2α |
|
|
|
0 5 3 |
|
−11 |
|
|
|||||||||||||||||||||
|
|
|
(Α |
Β) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
2 |
|
|
1 |
~ |
|
|
|
|
|
|
|
|
|
~ |
|
|
|||
|
|
|
|
|
0 3 4 |
|
5 |
|
|
|
α |
|
|
+3α |
|
|
|
0 3 4 |
|
5 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
−2 7 |
|
16 |
|
|
|
|
|
|||
|
|
|
|
−3 1 4 |
|
−20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
1 |
−1 |
1 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
1 |
−1 |
1 |
|
12 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
0 3 4 |
|
5 |
|
|
|
α2 −α3 |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
~ α2 +α4 ~ |
|
с |
|
|
|
|
|
|
5 |
|
~ α |
|
↔ |
α |
|
|
~ 0 −2 7 |
|
16 ~ |
|
|
||||||||||||||||||
|
|
|
0 3 4 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
2 |
0 |
3 |
4 |
|
5 |
|
|
|
||||||
|
|
|
|
|
|
0 |
−2 |
7 |
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1 −1 1 |
12 |
1 −1 1 |
12 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
~ 2α3 + |
3α2 |
~ |
0 −2 7 |
16 |
~ |
|
0 −2 7 |
16 |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0 0 29 |
58 |
|
|
|
|
0 0 1 |
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
Следовательно, r(Α) = r(Α |
|
Β) = 3 , |
поэтому система совместна и имеет |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
еди стве ое реше ие. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x − x |
|
+ x =12, |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Преобр зов нн я система имеет вид: |
|
− 2x2 + 7x3 =16, |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
= 2, |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ее решение: x1 =9, |
x2 = −1, x3 = 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
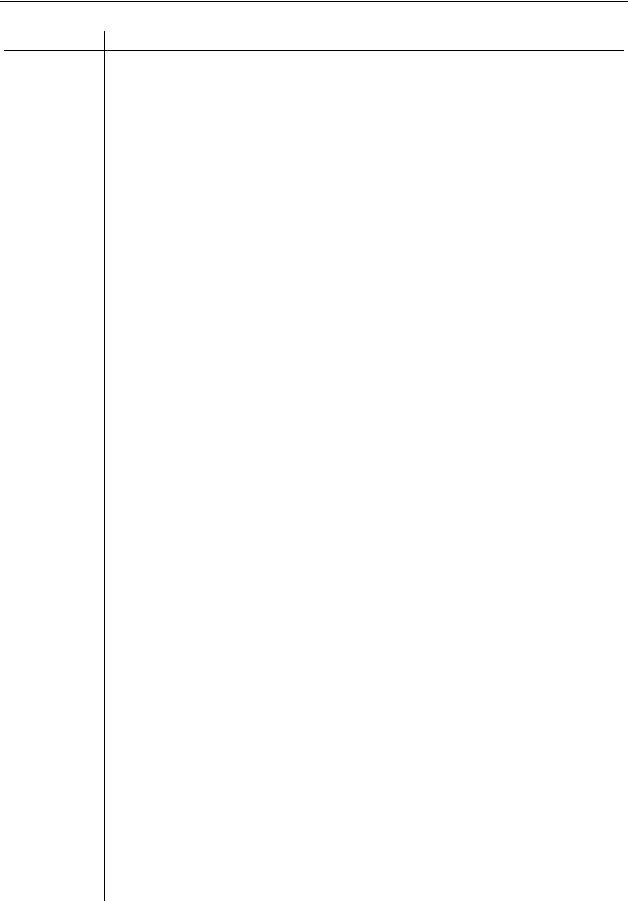
36
Лекция 3
Пример:
|
|
|
|
|
|
|
|
x |
−4x |
2 |
+ 2x |
3 |
= −1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
ru |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Решить систему |
|
2x1 −3x2 − x3 −5x4 |
= −7, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= −8. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
3x1 −7x2 + x3 −5x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Рассмотрим расширенную матрицу: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
1 −4 2 0 |
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
−1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
α2 −2α1 |
|
|
|
|
−4 2 0 |
|
||||||||||||||||||||||||||||||||||
(Α |
|
Β) = |
|
2 |
|
|
−3 −1 −5 |
|
−7 |
|
|
~ |
|
0 5 −5 −5 |
−5 |
|
~ |
||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
~ α |
|
− |
3α |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
3 |
|
|
−7 1 −5 |
|
−8 |
|
|
|
|
|
|
|
1 |
|
|
|
|
0 5 −5 −5 |
−5 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 −4 2 0 |
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 0 −2 −4 |
|
−5 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
~ α |
3 |
− |
α |
2 |
~ |
|
0 1 −1 −1 |
|
−1 |
~ α |
|
+ 4α |
2 |
~ |
0 1 −1 −1 |
|
−1 |
. |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
0 0 0 0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 0 0 0 |
|
0 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Следовательно, r(Α) = r(Α |
|
Β) = 2 , поэтому система совместна и не опре- |
|||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||
делена. Выберем |
x1 |
|
и x2 в качестве базисных неизвестных и запишем |
||||||||||||||||||||||||||||||||||||||||||||
преобразованную систему: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
= −5 + 2x |
+ 4x |
4 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 = −1 + x3 + x4 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Полагая x3 = c1 , |
|
x4 = c2 , |
где c1 |
и |
|
|
c2 |
− произвольные числа, получаем об- |
|||||||||||||||||||||||||||||||||||||||
щее решение |
|
и темы |
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
x |
−5 + 2c + |
4c |
|
|
−5 |
|
|
|
|
|
2 |
|
|
4 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
X = |
x2 |
с |
|
−1+ c1 + c2 |
|
|
|
|
+ c1 |
|
1 |
|
|
1 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
x |
|
= |
|
|
|
|
|
c |
|
|
|
|
|
= |
|
0 |
|
|
|
1 |
+ c2 |
|
0 |
. |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
|
|
|||||||||||||
Реше ие соответствующей однородной системы |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x − 4x |
2 |
+ 2x |
= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2x1 − 3x2 − x3 − 5x4 = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 7x2 + x3 − 5x4 |
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
можно записать в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
X = c |
|
|
+ c |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Системы линейных уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
||||||
|
3.6*. Фундаментальная система решений |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
Если СЛУ имеет вид A X = c1B1 + c2 B2 , |
то ее решение может быть записано в виде |
||||||||||||||||||||||||
|
Т |
||||||||||||||||||||||||||
|
|
X = c1 X1 +c2 X2 , где |
X1 |
и X 2 |
- решения систем |
|
A X = B1 и A X = B2 |
соответствен- |
|||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
но. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
ru |
|
|
|
Доказательство: |
|
|
X |
1 |
= A−1 B |
, |
X |
2 |
= A−1 B |
, |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
X = A−1 (c B + c B |
) |
= A−1 (c B ) |
+ A−1 (c B |
)= |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
1 |
1 |
2 |
2 |
|
|
|
|
1 |
1 |
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
= c A−1 B +c A−1 B = c X |
1 |
+c X |
. |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 |
|
1 |
|
2 |
|
|
2 |
1 |
|
|
2 |
2 |
|
|
|
|
|
|
||
|
|
В предыдущем параграфе возникла система (5) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
AXr |
= B0 +c1B1 +c2 B2 +... +cn−r Bn−r . |
|
|
|
|
|
|||||||||||||||
|
|
Из только что доказанной теоремы следует, что |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
Xr |
= Xr ,0 +c1 Xr ,1 +c2 Xr,2 +... + cn−r Xr ,n−r , |
|
|
|
|
(7) |
|||||||||||||||||
|
|
где Xr,0 , Xr,1, |
Xr,2 , ..., Xr,n−r |
- решения системы (5) при подстановке в нее (5) вместо |
|||||||||||||||||||||||
|
|
правой части столбцов B0 , |
B1, B2 , ..., Bn−r . |
antigtu |
|
|
|
||||||||||||||||||||
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Поскольку X |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
что базисные неизвестные линейно зависят от |
||||||||||||||||||
|
|
|
= |
2 |
, это означает, |
||||||||||||||||||||||
|
|
|
r |
|
... |
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
свободных неизвестных и в выражении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
x1 (c1, c2 , ..., cn−r ) |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
x (c , c , ..., |
c |
|
) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
2 |
n−r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
........................... |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xr (c1, c2 , ..., cn−r ) |
|
|
|
|
|
|
|
(8) |
|||||||||
|
|
|
|
|
|
|
|
|
X = |
|
|
|
|
c1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cn−r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для общего |
|
решения |
системы |
|
|
xi = xi (c1, c2 , ..., cn−r ) |
- |
линейные функции |
|||||||||||||||||
|
|
c1, c2 , ..., cn−r . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Это позволяет записать матрицу–столбец (6) - общее решение системы (1) в виде: |
|
||||||||||||||||||||||||
|
|
|
|
|
|
X = X0 +c1 X1 +c2 X2 +...+cn−r Xn−r , |
|
|
|
|
(9) |
||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
38 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
|
Лекция 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
где частные решения Xi |
(i = 0, 1, 2, ..., n −r) , образующие фундаментальную сис- |
|
||||||||||||||||
|
|
тему решений, получены при следующих значениях постоянных в выражении (5): |
|
|||||||||||||||||
|
|
x1 (0, 0, ..., 0) |
|
|
x1 (1, 0, ..., 0) |
|
|
|
x1 (0, 1, ..., 0) |
|
|
x1 (0, 0, ..., 1) |
|
|
||||||
|
|
|
СЛУ); |
|
x (1, 0, ..., 0) |
|
|
|
antigtu |
|
x (0, 0, ..., 1) |
|
|
|||||||
|
|
x (0, 0, ..., 0) |
|
|
|
|
x (0, 1, ..., 0) |
|
|
|
||||||||||
|
|
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
.................... |
|
|
.................... |
|
|
|
.................... |
|
|
|
|
|
......... |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X = xr (0, 0, ..., 0) |
, |
X = xr (1, 0, ..., 0) |
|
, X |
|
= xr (0, 1, ..., 0) |
, ..., X |
|
= xr |
|
(0, 0, ..., 1) |
. |
|
||||||
|
0 |
|
|
|
1 |
|
|
|
|
2 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|
... |
|
|
|
... |
|
|
|
|
... |
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
0 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Выражение (8) называется разложением по фундаментальной системе решений. |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
В результате изучения материала, изложенного в этой лекции, |
|
|
|
|
|
|
|
|||||||||||
|
|
студент должен знать: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
основные понятия теории СЛУ (основная и расширенная мат- |
|
|
|
|||||||||||||||
|
|
|
рицы |
|
системы, |
совместные |
|
/ |
несовместные, определен- |
|
|
|
||||||||
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ные/неопределенные однородные/неоднородные системы, ба- |
|
|
|
||||||||||||||
|
|
|
зисные и свободные неизвестные, общее и частное решение |
|
|
|
||||||||||||||
|
|
|
способ выяснения, имеет ли |
и тема решения |
|
|
|
|
|
|
|
|
||||||||
|
|
|
(теорема Кронекера – Капелли); |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
методы решения СЛУ – матричный, правило Крамера, метод |
|
|
|
||||||||||||||
|
|
|
Гаусса; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схему отыскания |
бщего решения СЛУ. |
|
|
|
|
|
|
|
|
||||||||
Студент должен п нимать, что преобразования строк матриц системы соответствуют пре браз ваниям уравнений системы.
Лекция 4 ВЕКТОРНАЯ АЛГЕБРА
В лекции 4 излагаются элементы векторной алгебры. Необходимость применения
ством и наглядностью математических формулировок законов, сколько объективными свойствами изучаемых явлений. Направленные величины используются при описании широкого круга явлений, относящихся к теоретической механике, механике жидкости и газа, теории электромагнетизма. Курс математики для инженерных специальностей включает также элементы векторного анализа, который будет излагаться после изучения дифференциального и интегрального исчислений одного и нескольких переменных.
векторного исчисления при изложении технических дисциплин вызвана не столько удоб- |
||
antigtu |
. |
ru |
4.1. |
Основные определения |
|
4.2. Линейные операции над векторами |
||
4.3.* Линейная зависимость векторов. |
||
|
Геометрические критерии линейной зависимости. |
|
4.4. |
Базис и координаты |
|
4.5. Ортонормированный базис. Декартова прямоугольная система |
||
|
координат |
|
4.6. |
Скалярное произведение векторов. Определение. |
|
|
|
с |
|
Алгебраические свойства. Геометрические приложения. |
|
|
Выражение через декартовы координаты сомножителей |
|
4.7. |
Векторное произведение векторов. Определение. |
|
|
Алгебраические и геометриче кие свойства. Выражение через де- |
|
|
картовы координаты омножителей |
|
Скачано |
|
|
4.8. |
Смешанное произведение векторов. Определение. |
|
Алгебраические и геометрические свойства. Выражение через декартовы к рдинаты с мн жителей
4.1. Основные определе ия
Величины, для определения которых достаточно знать одно число, называются ск ляр ми (температура, масса, работа силы, плотность). Величины другого рода х р ктеризуются не только численным значением, но и направлением в пространстве. Таковы перемещение, скорость, ускорение, сила, напряженность электри еского поля и т.д. Рассмотрение такого рода величин приводит к понятию вектора.
О Геометрическим вектором (вектором) назы-
вается направленный отрезок (отрезок, у которого одна граничная точка считается начальной, другая – конечной).

40 |
|
падают: 0G, 0G = 0 . |
|
|
|
|
|
|
|
|
ru |
Лекция 4 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
На чертеже вектор обозначается стрелкой; над буквенным обозначением |
||||||||||||
|
|
|
|
|
|
|
|
|
|
JJG |
. |
|
|
||
|
|
|
вектора также ставится стрелка AB , a . |
|
|
||||||||||
|
|
|
|
|
|
||||||||||
|
О |
|
Длиной вектора (модулем) называется расстояние между началом и кон- |
||||||||||||
|
|
|
|
|
|
JJG |
|
|
|
|
|
|
|
|
|
|
|
|
цом вектора. Обозначение: |
AB |
|
или |
|
a |
. |
|
|
|
|||
|
|
|
Нулевым вектором называется вектор, у которого начало и конец сов- |
||||||||||||
|
О |
|
|||||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
Векторы называются коллинеарными, если лежат на одной прямой, ли- |
||||||||||||
|
О |
|
|||||||||||||
|
|
|
бо на параллельных прямых. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Нулевой вектор коллинеарен любому вектору. |
|
|
||||||||||
|
О |
|
Три вектора называются компланарными, если они лежат в одной |
||||||||||||
|
|
|
плоскости или в параллельных плоскостях. |
|
|
|
|||||||||
|
|
|
|
|
|
||||||||||
|
|
|
Если тройка векторов содержит нулевой вектор или пару коллинеарных |
||||||||||||
|
|
|
векторов, то эти векторы компланарны. |
|
|
|
|||||||||
|
|
Вектор, фигурирующий в определении, носит название связанного, или |
|||||||||||||
|
! |
|
|||||||||||||
|
|
|
закрепленного вектора. |
|
|
|
|
|
|
|
|
JJJG |
|||
|
|
|
Если же точка приложения вектора (точка |
A для вектора |
AB ) может |
||||||||||
|
|
|
быть выбрана произвольно, вектор называется свободным. Если точка |
||||||||||||
|
|
|
приложения может двигаться по линии действия вектора, говорят о |
||||||||||||
|
|
|
скользящем векторе. Иначе говоря, свободный вектор aG |
является пред- |
|||||||||||
|
|
|
ставителем бесконечного множе тваantigtuсвязанных или скользящих векто- |
||||||||||||
|
|
|
ров. |
|
|
|
|
|
|
|
|
|
|
||
|
|
Скачано |
|
матривать только |
|
|
|||||||||
|
|
|
В дальнейшем мы будем ра |
|
|
||||||||||
|
|
|
свободные векторы. Для них, в частности, спра- |
|
|
||||||||||
|
|
|
ведливо следующее пределениес . |
|
|
|
|
|
|
|
|||||
|
О |
|
Два вектора равны, если |
ни коллинеарны, име- |
|
|
|||||||||
|
|
|
ют одинаковую длину и направление. |
|
|
|
|
|
|
||||||
|
|
|
Например, aG = bG. |
|
|
|
|
|
|
|
|
|
|
||
|
4.2. Линейные опер ции над векторами |
|
|
|
|||||||||||
|
О |
|
Суммой aG +b двух векторов |
a |
и b |
|
называется |
|
|
||||||
|
|
|
векторG, идущий из начала вектора a в конец век- |
|
|
||||||||||
|
|
|
тора b при условии, что начало вектора b |
при- |
|
|
|||||||||
ложено к концу вектора a (правило треуголь-
ник ).

Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
41 |
|
|||||||
Свойства операции сложения векторов: |
|
|
|
|
|
|
|||||||||||||
|
G |
|
G |
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
||
1˚. |
a |
+b |
|
= b |
+ a |
(переместительное свойство). |
|
|
|
|
|
|
|||||||
2˚. |
G |
|
G |
G |
|
G |
G |
G |
(сочетательное свойст- |
|
. |
ru |
|
|
|||||
(a |
+b )+ c |
= a +(b |
+ c ) |
|
|
|
|||||||||||||
|
во). |
|
|
G |
|
G |
|
|
|
|
antigtu |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3˚. Существует нулевой |
вектор |
0 , |
такой, |
что |
|
|
|
||||||||||||
|
aG |
+ 0G |
|
= aG |
для любого вектора |
a |
(особая роль |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||||||||
|
нулевого вектора). |
aG существует противо- |
|
|
|
|
|||||||||||||
4˚. |
Для каждого вектора |
|
|
|
|
||||||||||||||
|
положный |
|
ему |
|
|
′ |
G |
такой, |
что |
|
|
|
|
||||||
|
G |
вектор a = |
−a , |
|
|
|
|
||||||||||||
|
G |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
+ (−a ) = |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Свойства доказываются геометрически. Докажем, например, свойство 1˚. |
||||||||||||||||||||||||||||||||||||||
|
|
Рассмотрим |
произвольный |
параллелограмм |
ABCD |
. |
Пусть |
G |
|
|
JJG |
|||||||||||||||||||||||||||||
G |
|
a = AB , |
||||||||||||||||||||||||||||||||||||||
|
JJJG |
|
|
G |
G |
JJJG |
|
|
|
JJJG |
JJJG |
JJG |
JJJG |
|
|
JJG |
= |
JJJG |
JJJG |
|
G |
|
|
G |
||||||||||||||||
b |
= BC . Тогда a |
+b = AC |
. Но BC |
= |
AD , |
DC = |
AB |
|
|
AC |
AD + DC |
= b |
+ a . |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
G |
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, a +b |
= b + a . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
При |
доказательстве |
|
|
свойства |
1˚ обосновано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
еще одно правило сложения векторов, назы- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
ваемое правилом параллелограмма: если |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
векторы a и b приложены к общему началу и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
на них построен параллелограмм, то сумма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
G |
G |
этих векторов представляет собой диа- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
a |
+b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
гональ параллел грамма, идущуюс |
из общего |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
начала векторов |
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
a и b . |
|
|
|
|
|
|
|
|
|
|
|
G |
|
G |
G |
|
G |
|
|
|
|
|||||||||||||||||
! |
|
Вычитание вект р в |
пределяется через сложение: |
a |
−b = a + (−b) . |
|||||||||||||||||||||||||||||||||||
|
|
Иначе: если векторы |
|
|
aG |
и b |
приложены к общему началу, то разностью |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
G |
G |
|
|
|
|
|
|
|
G |
−b , |
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
||||
|
|
векторов a |
и b будет вектор a |
идущий из конца вектора b |
к концу |
|||||||||||||||||||||||||||||||||||
|
|
вектора aG. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
О |
Произведением αaG |
|
|
вектора a на вещественное число α |
|
называется |
||||||||||||||||||||||||||||||||||
|
|
вектор bG, коллинеарный вектору a , имеющий длину |
α |
|
|
aG |
|
|
|
и на- |
||||||||||||||||||||||||||||||
|
|
правление, совпадающее с направлением вектора a |
в случае α > 0 и |
|||||||||||||||||||||||||||||||||||||
|
|
противоположное направлению вектора a в случае α < 0 . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
Геометрический смысл операции умножения вектора на число: |
|||||||||||||||||||||||||||||||||||||
|
|
при умножении вектора aG на число α вектор a «растягивается» в |
|
α |
|
раз |
||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
при |
|
α |
|
>1, при 0 < |
|
α |
|
<1 вектор «сжимается» в |
|
|
1 |
|
|
раз. Если α < 0 , век- |
||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
α |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тор, кроме этого, меняет направление на противоположное. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
42 |
|
чиселG). |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
Лекция 4 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Свойства операции умножения вектора на число: |
|
|
|
. |
|
|
|
|
||||||||||||||||||
|
|
|
G |
G |
|
|
|
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
5˚. |
|
α(a +b )=αa +αb |
(распределительное свойство |
|
|
|
суммы |
|||||||||||||||||||
|
|
относительно |
|||||||||||||||||||||||||
|
6˚. |
|
векторов). |
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|||||||||
|
|
(α + β )aG =αaG + βaG (распределительное свойство относительно суммы |
|||||||||||||||||||||||||
|
7˚. |
|
α(βa)= (αβ )a (сочетательное свойство чи- |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
словых сомножителей). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
8˚. |
|
1 aG = aG |
(существование единицы). |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
ДокажемG |
,G |
например, свойство 5˚. Отложим |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
векторы a и |
|
b |
от общего начала и построим на |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
них параллелограмм, диагональ которого будет |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
представлять собой сумму aG |
+b . При «растяжении» (α >1 ) сторон этого па- |
|||||||||||||||||||||||||
|
раллелограмма в α |
|
раз его диагональ также «растягивается» в α раз, но это и |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
G |
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
означает, что сумма αa |
+αb |
равна α(a + b) . |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
Свойства 1˚ ÷ 7˚ для векторов позволяют производить выкладки в век- |
|||||||||||||||||||||||||
|
! |
|
|||||||||||||||||||||||||
|
|
|
торной алгебре по тем же правилам, по которым производятся аналогич- |
||||||||||||||||||||||||
|
|
|
ные выкладки в алгебре вещественных чисел. |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
4.3.* Линейная зависимо ть векторов. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Геометрические критерии линейной зависимости |
|
|
||||||||||||||||||||||
|
О |
|
Линейной комбинацией вект рсв a , aG , ..., aG называют выражение: |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
G |
+ ... |
G |
n |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α1a1 + α2a2 |
+αnan = |
∑αi ai , |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i =1 |
|
|
|
|
|
|
|
|
|
|
|
где α , α |
2 |
, ..., α |
n |
- произволь ые действительные числа. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
|
|
|
G |
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
О |
|
Система векторов a1 |
, a2 , ..., an |
называется линейно зависимой, если существуют |
||||||||||||||||||||||
|
|
|
действительные числа α1 , α2 , ..., αn , такие, что хотя бы одно из них отлично от нуля, |
||||||||||||||||||||||||
|
|
|
и выполняется р венство: |
α aG |
+ α aG |
+ ...+α aG = 0 . |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(*) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
2 2 |
|
|
n n |
|
|
|
|
|
|
|
|
|
|
|
|
В противном слу ае, |
т.е. если линейная комбинация (*) обращается в ноль только |
|||||||||||||||||||||||
|
|
|
|
при всех αi |
= 0, |
i =1, ..., n , то система векторов называется линейно незави- |
|||||||||||||||||||||
|
|
|
|
симой. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Если векторы линейно зависимы, то любой вектор может быть выражен в виде ли- |
|||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
нейной |
омбинации остальных. Например, если αn ≠ 0 , то из (*) следует, что |
|||||||||||||||||||||||
|
|
|
|
|
G |
|
|
G |
|
|
G |
|
|
G |
n−1 |
G |
, где β1 |
= − |
α1 |
, ..., βn−1 |
= − |
αn−1 |
. |
|
|||
|
|
|
|
an = β1a1 |
|
+ β2 a2 + ...+βn−1an−1 = |
∑βi ai |
αn |
αn |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|||

|
Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
|
|
43 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Геометрические критерии линейной зависимости |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
Система двух ненулевых векторов a1 , |
aG2 |
линейно зависима тогда, |
и только тогда, |
||||||||||||||||||||||||||||||||||||||
|
Т |
||||||||||||||||||||||||||||||||||||||||||
|
|
когда векторы коллинеарны. |
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
Доказательство: |
|
|
|
|
|
|
|
|
|
|
|
aG |
|
|
|
|
|
|
|
|
aG |
|
α2 aG |
|
|
||||||||||||||||
|
4.4. Базис и координаты |
|
|
|
|
|
|
|
|
|
|
, |
= − |
; или |
|||||||||||||||||||||||||||||
|
|
Необходимость. Пусть |
α aG + α |
|
|
= 0 и α ≠ 0 . Тогда α aG |
= −α aG |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
|
|
2 2 |
|
|
|
|
1 |
|
|
1 1 |
|
|
2 2 |
. |
1 |
|
α |
2 |
|
|
|||||||
|
|
aG |
= λaG , где λ = −α2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||||||||||
|
|
1 |
|
2 |
|
|
|
|
|
α1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Достаточность. |
Пусть |
|
a |
= λa . |
|
|
Запишем это |
равенство |
в виде |
|
a |
|
−λa |
= 0 |
или |
||||||||||||||||||||||||||
|
|
|
G |
|
|
G |
G |
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
α a |
+ α |
a |
= 0 , |
где α =1, α |
2 |
= −λ ≠ 0 . Итак, существует нулевая линейная комби- |
|||||||||||||||||||||||||||||||||||
|
|
1 |
1 |
2 |
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нация с ненулевыми коэффициентами, а это и означает, что система векторов линей- |
|||||||||||||||||||||||||||||||||||||||||
|
|
но зависима. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Т |
Система трех векторов aG1, aG2 , aG3 линейно зависима тогда и только тогда, когда век- |
|||||||||||||||||||||||||||||||||||||||||
|
|
торы компланарны. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.е. для любых aG1, aG2 , aG3 , aG4 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
Система четырех векторов всегда линейно зависима, |
|||||||||||||||||||||||||||||||||||||||||
|
Т |
||||||||||||||||||||||||||||||||||||||||||
|
|
найдутся |
G |
такие |
числа |
α , |
α |
|
, |
|
α |
, α |
|
, |
|
не |
равные |
одновременно нулю, |
что |
||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
G |
+ α |
|
+α |
|
G |
+α |
|
G |
G 1 |
|
|
|
2 |
|
|
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
α a |
a |
a |
4 |
a |
4 |
= 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
1 |
1 |
2 |
|
2 |
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
Базисом в пространстве будем называть три некомпланарных вектора, |
|||||||||||||||||||||||||||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
взятые в определенном порядке. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
О |
Базисом на плоск сти будем называть два неколлинеарных вектора на |
|||||||||||||||||||||||||||||||||||||||||
|
|
этой плоскости, взятые в |
|
пределенном порядке. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
О |
Базисом на прям й будем называть любой ненулевой вектор этой пря- |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
мой. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Т |
Каждый вектор может быть разложен по базису в пространстве и это |
|||||||||||||||||||||||||||||||||||||||||
|
|
разложение единственно. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
Иначе, если aG |
, bG, cG |
|
– три некомпланар- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
ных вектора в простр нстве, то любой вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
G |
|
может |
|
|
|
быть |
|
|
записан |
|
|
|
в |
виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
d |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
G |
|
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
=αa + βb +γc . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
Док з тельство возможности: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
G |
G |
|
G |
} - некоторый базис в простран- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
Пусть {a, b, |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
стве, dG - произвольный вектор. |
|
Тогда |
αaG + βb +γcG = 0G |
|
только |
при |
|||||||||||||||||||||||||||||||||||
|
|
α = β = γ = 0 . |
α aG +α |
2 |
bG +α |
3 |
cG +α |
dG |
= 0 , при этом α4 ≠ 0 , |
|
так как если |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
44 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
|
Лекция 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
α4 = 0 , то α1aG +α2bG +α3cG = 0 , а этого быть не может, т.к. {aG, bG, cG} - ба- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
зис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда G |
|
|
G |
|
G |
|
|
|
|
G |
|
G |
|
|
|
|
α1 |
|
G |
|
|
α2 |
G |
|
|
α3 |
|
G |
|
|
|
|
G |
|
|
G |
G |
|||||||||
|
|
|
α |
|
d = −α a −α |
b −α |
c , d = − |
|
|
|
|
antigtu |
=αa + βb +γc . |
||||||||||||||||||||||||||||||||||||
|
|
|
|
4 |
|
|
|
1 |
2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
α4 |
|
|
|
|
|
α4 |
|
|
|
|
α4 |
|
|
|
|
|
|
. |
|
|
|
|
|||||
|
|
|
Доказательство единственности: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
по базису |
||||||||||||||||||||
|
|
|
Предположим, что существуют два разложения вектора |
d |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
G G |
|
G |
}, |
то есть |
G |
= |
|
G |
+ |
|
G |
|
|
|
|
|
|
G |
; |
|
d = |
|
|
|
G |
|
|
|
|
G |
|
|
G |
|
|
|
|
|||||||||
|
|
|
{a, b, |
c |
d |
α1a |
β1b |
+γ1c |
|
α2a + β2b + |
γ2c . Вычтем из од- |
||||||||||||||||||||||||||||||||||||||
|
|
|
ного равенства |
другое: |
|
|
|
|
|
|
|
|
|
G |
+ |
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
= |
|
G |
Так как |
|||||||||||||
|
|
|
(α1 −α2 )a |
β1 − β2 )b + (γ1 −γ2 )c |
|
0. |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
G G |
|
G |
}- базис, ни один из векторов |
|
|
G |
|
|
|
|
|
G |
} не может быть выражен |
|||||||||||||||||||||||||||||||||
|
|
|
{a, b, c |
|
{a, b, |
|
c |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
через |
|
другие |
при |
|
|
|
ненулевых |
|
|
коэффициентах, |
|
|
поэтому |
α1 =α2 , |
||||||||||||||||||||||||||||||||
|
|
|
β1 = β2 ,γ1 =γ2 . |
|
|
|
|
|
dG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
! |
|
Геометрически вектор |
представляет собой пространственную диаго- |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
наль параллелепипеда, построенного на векторах a , |
b и сG. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
О |
|
Коэффициенты разложения вектора по базису называются координата- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ми вектора в данном базисе и в каждом базисе определяются одно- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
значно: |
|
|
|
|
G |
|
|
|
|
G |
|
|
|
G |
|
|
|
|
|
G |
|
|
|
{ |
|
|
|
|
|
|
|
}. |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
d =αa + βb +γc = |
α |
, β,γ |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
Т |
|
При сложении двух векторов d |
|
|
|
и d |
|
|
их координаты (относительно лю- |
|||||||||||||||||||||||||||||||||||||||
|
|
|
Скачано |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
бого базиса) складываются. При умножении вектора dG1 на любое число |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
α все его координаты умн жаютсяс |
на это число. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
Доказательств : |
G |
|
|
|
G |
|
|
|
|
|
|
|
G |
|
|
|
|
|
G |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Пусть |
G |
|
|
G |
|
|
|
d |
|
=α |
|
|
|
|
|
|
|
+ |
γ |
|
. Тогда в силу свойств 1˚-7˚ |
|||||||||||||||||||||||||
|
|
|
d |
|
=α a + |
β b +γ c |
, |
2 |
2 |
a + β |
2 |
b |
2 |
c |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
1 |
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
линейных операций |
|
ад векторами |
|
|
|
|
|
|
|
|
|
)bG |
|
|
|
|
|
|
|
|
)cG, |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
dG + dG |
|
|
= (α +α |
2 |
)aG |
+ (β |
1 |
+ β |
2 |
+ (γ |
1 |
+γ |
2 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
2 |
λdG |
|
1 |
|
|
)aG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= (λα |
+ (λβ )bG |
|
+ (λγ |
1 |
)cG. |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
В силу единственности разложения вектора по базису теорема доказана. |
||||||||||||||||||||||||||||||||||||||||||||||
|
О |
|
Системой координат в |
пространстве |
называют |
совокупность базиса |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
G G |
|
G |
} |
и некоторой точки, называемой началом координат. |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
{a, b, |
c |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
JJJJG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
О |
|
Вектор OM , идущий из начала координат в точку M , называется ради- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ус-вектором точки M . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
JJJG |
|||||||||||
|
О |
|
Координ т ми точки M (α, β,γ ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
называются координаты вектора OM . |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Та им образом, |
координаты радиус-вектора |
|
|
|
JJJG |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
OM |
и координаты точки |
||||||||||||||||||||||||||||||||||||||||||||
M совпадают.
Векторная алгебра |
45 |
4.5. Ортонормированный базис. Декартова прямоугольная система координат
Пусть в качестве базиса выбраны три взаимно перпендикулярных векто-
ра с длинами, равными единице. |
|
|
|
|
|
|
|
. |
|
ru |
|
|
||||||||||||
|
|
|
|
G G |
|
G |
= |
|
G |
= |
G |
=1 |
|
|
|
|
|
|
|
|||||
|
Обозначения: {i, j,k}, |
i |
|
j |
k |
|
|
|
|
|
|
|
||||||||||||
|
Такой базис называется |
ортонормированным |
|
|
|
|
||||||||||||||||||
О |
|
|
|
|
|
|||||||||||||||||||
|
(ОНБ). Векторы iG, |
Gj, kG |
называются базисны- |
Z |
|
|
|
M |
||||||||||||||||
|
|
|
|
|||||||||||||||||||||
|
ми ортами. Зафиксируем точку О – начало ко- |
z |
|
|
|
|||||||||||||||||||
|
G |
|
|
|
|
|||||||||||||||||||
|
ординат и отложим от нее векторы i , |
G |
k |
|
Gj |
|
Y |
|||||||||||||||||
|
|
j, k . По- |
x i 0 |
|
|
|
y |
|||||||||||||||||
|
лученная система координат называется пря- X |
|
|
|
|
|
||||||||||||||||||
|
моугольной декартовой. Координаты любого |
|
|
|
|
|
||||||||||||||||||
|
вектора в этом базисе называются декартовыми |
|
|
|
|
|
||||||||||||||||||
|
координатами вектора: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
aG ={x, y, z} = x iG+ y Gj + z k |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Прямые линии, проведенные через начало координат по направлениям |
|||||||||||||||||||||||
О |
||||||||||||||||||||||||
|
базисных векторов, называются координатными осями: Gi – порождает |
|||||||||||||||||||||||
|
||||||||||||||||||||||||
|
G |
|
|
|
|
|
|
G |
– порождает antigtuOz . Координаты точки М (вектора |
|||||||||||||||
|
Ox ; j – порождает |
Oy ; k |
||||||||||||||||||||||
|
JJJJG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Oy , Oz называются |
|||||
|
OM ) в декартовой си теме координат по осям Ox , |
|||||||||||||||||||||||
|
соответственно абсциссой, ординатой и аппликатой. |
|
|
|
|
|||||||||||||||||||
|
Декартовы прямоугольные координаты |
x, y, z вектора a равны проекци- |
||||||||||||||||||||||
|
ям этого вектора на |
си Ox , |
|
с |
|
|
|
|
|
|
|
|
|
|||||||||||
|
Oy , Oz соответственно; другими словами, |
|||||||||||||||||||||||
|
x = npOX aG = |
|
aG |
|
cosα , |
|
y = npOY a = |
|
aG |
|
cos β , z = npOZ aG = |
|
aG |
|
cosγ . |
|||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Здесь α, β, γ |
|
– углы, которые составляет вектор |
a с координатными |
||||||||||||||||||||
|
осями Ox , Oy , Oz соответственно, при этом cosα , |
cos β , cosγ |
|
называ- |
||||||||||||||||||||
|
ются напр вляющими косинусами вектора a . |
|
|
|
|
|
||||||||||||||||||
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор aG0 = |
aG |
|
={cosα, cos β, cosγ} представляет собой вектор единич- |
||||||||||||||||||||
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ной длины данного направления, или орт данного направления. Для напр вляющих косинусов справедливо соотношение:
cos2 α + cos2 β + cos2 γ =1.
46 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
Лекция 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4.6. Скалярное произведение векторов. Определение. |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
Алгебраические свойства. Геометрические приложения. |
|||||||||||||||||||||||||||||||||||||||||||||
|
Выражение через декартовы координаты сомножителей |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G G |
|
|
|
|
||
О |
Углом между векторами a и b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
||||||||||||||||||
|
(обозначается (a , b )) называется наи- |
|||||||||||||||||||||||||||||||||||||||||||||
|
меньший угол, на который надо повернуть векторa |
до.совмещения с |
||||||||||||||||||||||||||||||||||||||||||||
|
вектором bG. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
О |
Проекцией вектора aG |
на ось l, |
прl a , называ- |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
ется величина А`В` направленного отрезка |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
JJJJJG |
оси l. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
A`B` |
|
|
|
|
( |
|
|
|
G |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
G |
|
G |
|
|
|
G |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
l0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
прl a = |
a |
cosϕ = |
a |
cos a , l0 |
|
, |
|
где |
|
|
- орт |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
О |
|
оси l. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Скалярным произведением двух векторов называется число, равное |
|||||||||||||||||||||||||||||||||||||||||||||
|
произведению длин этих векторов на косинус угла между ними: |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
G G |
G |
|
G |
|
|
|
G |
G |
|
|
|
G |
|
|
|
|
|
|
G |
|
|
|
|
|
|
G |
G |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
(a b )= (a,b )= b = |
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
n |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(a , b ). |
|
|
|
||||||||||||||||||||||||||||||
! |
Если один из векторов aG, |
b |
|
нулевой, то |
( |
|
G b |
) |
= 0 . |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
Алгебраические свойства |
калярного произведения: |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
Скачано |
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1˚. |
|
|
|
|
|
|
(a b )=(b |
a). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Переместительное свойство: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
2˚. |
Сочетательное св йство: |
|
|
с |
(λaG b )= λ(aG bG)= (aG λbG) |
|
|
|
||||||||||||||||||||||||||||||||||||||
3˚. |
Распределитель |
ое свойство: |
|
((aG +b ) cG)= (aG cG)+(bG cG), |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
(aG (b + cG))= (aG bG)+(aG cG). |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
4˚. |
G G |
, если |
G |
G |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
G |
= 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
(a, a)> 0 |
a |
≠ 0 , и (a, |
|
a)= 0 , если a |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
! |
Доказ тельства свойств следуют из определения. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
Геометри еские приложения скалярного произведения: |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
1. Связь с понятием модуля: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
G G |
G |
|
G |
|
G G |
|
|
G |
|
2 |
cos0 |
o |
|
= |
|
G |
|
2 |
; |
|
|
G |
|
= |
|
|
|
|
G G |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
(a,a)=| a | | a | cos |
a , a |
= |
|
a |
|
|
|
|
|
a |
|
|
|
a |
|
|
|
(a, a ) . |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
|
|
(aG, b ) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. |
Косинус угла между векторами: |
cos(a , b )= |
|
|
aG |
|
|
|
bG |
|
. |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
3. |
вязь с понятием проекции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||

|
Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
47 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Проекция прGaG |
вектора aG на вектор b : |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
G |
G |
|
|
|
|
|
|
|
G |
G |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
G |
|
G |
|
|
G |
G |
|
|
|
G |
|
|
|
|
|
|
(a, b ) |
|
|
|
(a, b ) |
|
|
|
|
G (a, b ) |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
прbGa = |
|
a |
|
cos(a , b )= |
|
a |
|
|
|
|
|
|
aG |
|
|
|
bG |
|
= |
|
|
bG |
|
|
|
, т.е. прbGa = |
|
bG |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
G |
|
|
|
G |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
(a, b ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Аналогично: прaGb |
= |
|
|
|
|
aG |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
4. |
Необходимым и достаточным условием ортогональности (перпендику- |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
лярности) двух ненулевых векторов является равенство нулю их скаляр- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
G |
|
|
G |
G |
|
|
|
π |
|
|
|
|
G G |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
ного произведения: a b : (a , b )= 2 (a,b) = 0 . |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
Выражение скалярного произведения векторов |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
через декартовы координаты сомножителей |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
Если два вектора |
G |
|
|
и |
|
|
G |
заданы своими декартовыми прямоугольными |
||||||||||||||||||||||||||||||||||||||
|
Т |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
a |
|
|
|
b |
|||||||||||||||||||||||||||||||||||||||||||
|
|
координатами |
a ={x1, |
|
y1, |
z1}, |
b ={x2 , |
y2 , z2}, |
то скалярное произведе- |
|||||||||||||||||||||||||||||||||||||||
|
|
ние этих векторов равно сумме парных произведений их соответствую- |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
щих координат, т.е. (a, b )= x1x2 + y1 y2 + z1z2 . |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
G |
|
|
|
G |
|
|
|
|
|
|
G |
|
с |
|
|
|
|
|
|
|
|
|
|
|
G |
|
G |
|
|
|
|
|
|
||||||
|
|
Доказательство: a |
= x i |
|
+ y j |
+ z k |
, |
b = x i + y |
2 |
j |
+ z |
k . |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
В силу свойств 2 и 3 имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
(aG, bG)= |
((x1iG + y1 Gj + z1kG),(x2iG + y2 Gj + z2kG))= |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
Скачано |
G |
G |
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
G G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
= x1x2 (i ,i )+ x1 y2 |
(i , j )+ x1z2 (i ,k )+ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
+y1x2 (Gj,iG)+ y1 y2 (Gj, Gj )+ y1z2 (Gj,k )+ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
+z1x2 (kG,iG)+ z1 y2 (kG, Gj )+ z1z2 (kG,kG). |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
G |
G |
|
G |
|
|
G |
|
|
|
|
|
|
G |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Так как i j , i k |
, j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gj) =1 1 cos90o = 0 . |
|
|
||||||||||||||||||||||||||
|
|
то (iG, Gj) = (iG, kG) = ( Gj,iG) = ( Gj, kG) = (kG,iG) = (kG, |
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
G G |
|
|
G |
2 |
G G |
|
|
G |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
G |
=1. |
|
|
|||||||||||
|
|
Но (i ,i ) |
|
|
=| i |
| cos(i ,i ) =| i |
| |
=1, аналогично ( j, j) =1 |
, (k , k ) |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Таким образом, (a, b )= x1x2 + y1 y2 + z1z2 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
1. Длина ве тора: aG ={x, |
y, z}, |
|
|
aG |
|
|
(aG, aG) = |
|
|
|
||||||||||||||||||||||||||||||||||||
|
С |
|
|
|
= |
x2 + y2 + z2 . |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
2. Расстояние между двумя точками: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
Если A=(x1, y1, |
z1 ), B =(x2 , |
y2, |
z2 ) |
|
– точки, |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||

48 Лекция 4
то ρ(AB) = |
JJJG |
|
= (x −x )2 |
+(y − y )2 |
+(z −z )2 . |
|
|
|
|
|
|
|
|
|
|
ru |
|||||||||||||||||||||||||
AB |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
1 |
|
|
2 |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3. Угол между векторами: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Если aG = (x1, y1, z1 ), |
bG |
= (x2 , y2 , |
z2 ), то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
G |
G |
(aG, |
|
b ) |
|
|
|
|
|
|
|
|
|
x x |
|
+ |
y y |
2 |
+ |
|
z z |
2 |
|
|
||||||||||||||||
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
1 |
|
|
1 |
|
|
||||||||||||
cos(a |
, b )= |
|
|
aG |
|
|
|
|
|
bG |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
. |
|
|||||
|
|
|
|
|
|
|
|
|
|
2 |
+ |
2 |
|
+ |
|
2 |
|
2 |
+ |
2 |
+ 2 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
y1 |
|
|
|
z1 |
|
x2 |
|
|
|
|
y2 |
z2 |
|
|||||
4. Проекция прGaGвектора a на вектор b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
G |
|
|
|
(aG, b ) |
|
|
|
x1x2 + y1 y2 |
+ z1z2 |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
прbGa |
= |
|
|
G |
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
x22 + y22 |
+ z22 |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
5. Направляющие косинусы вектора: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
cosα |
= cos a, |
|
|
i |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 + y2 + z2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
cos β |
= cos |
|
|
, |
|
|
|
j |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
x2 + y2 + z2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
cosγ |
= cos a, |
|
|
k |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
2 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtux + y + z |
|
|
|
|
||||||||||||||||||
|
|
|
cos2 α + cos2 |
|
β + cos2 |
|
|
γ = 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.7. Векторное пр изведение векторов. Определение. Алгебраические свойства. Геометрические приложения. Выраже ие через декартовы координаты сомножителей
|
Упорядоченн я тройка некомпланарных векторов |
a |
, |
aG |
, aG |
, приведен- |
О |
||||||
|
|
1 |
|
2 |
3 |
|
ныхGк одному н ч лу, называется правой, если из конца третьегоG вектора a3 кр тч йший поворот первого вектора a1 ко второму a2 виден со-
вершаемым против часовой стрелки. В противном случае тройка назы-
вается левой. |
JG |
|
|
JJG |
|
|
|
a3 |
JJG |
a3 |
JJG |
|
a2 |
|
|
|
|
|
a2 |
|
JG |
G |
|
|
a1 |
a1 |
|
|
правая |
левая |
|
Скачано |
|
|
|

|
Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
49 |
||||
|
|
Система координат называется правой, если ее базисные векторы обра- |
|||||||||||||||||||||||||||||||||||||
|
О |
||||||||||||||||||||||||||||||||||||||
|
|
зуют правую тройку. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
В дальнейшем мы будем рассматривать только правые системы коорди- |
|||||||||||||||||||||||||||||||||||||
|
|
нат. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При перестановке местами двух соседних векторов ориентация тройки |
|||||||||||||||||||||||||||||||||||||
|
|
меняется. |
Если тройки |
G |
|
|
b c a , |
|
|
c a b |
- |
правые, |
|
то |
G G |
|
G |
G |
|||||||||||||||||||||
|
|
a b c , |
|
|
|
a c b , |
c b a , |
||||||||||||||||||||||||||||||||
|
|
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
|
|
|
|
b aG c - левые. При круговой (циклической) перестановке.векторов ори- |
|||||||||||||||||||||||||||||||||||||
|
|
ентация тройки не меняется. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Векторным произведением вектора a на вектор b |
называется вектор |
||||||||||||||||||||||||||||||||||||
|
О |
||||||||||||||||||||||||||||||||||||||
|
|
G |
G |
G |
G |
G |
|
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
c = |
a, b |
= a ×b |
= a |
×b , удовлетворяющий следующим трем требова- |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ниям: |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
G |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на синус |
|||||
|
|
1). Длина вектора c равна произведению длин векторов |
a |
|
и b |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
G |
G |
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
JGG |
|
|
|
|
|
|
|
|
|
|
угла между ними, т.е. |
|
c |
= |
|
|
|
|
|
|
= |
|
|
a |
|
|
b |
|
sin (a,b). |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
a, b |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2). Вектор c ортогонален к каждому из векторов a и b , т.е. c перпенди- |
|||||||||||||||||||||||||||||||||||||
|
|
кулярен плоскости, в которой лежат векторы |
|
и b . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b c является правой. |
|
|
|
|
||||||||||||||
|
|
3). Вектор c направлен так, что тройка |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
Алгебраические свойства векторного произведения: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtuG |
G |
|
|
|
|
|
|
|||||||||||||
|
1˚. |
Антиперестановочность |
омножителей: |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
a, b |
|
= − b, a . |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
2˚. |
Сочетательное свойство: |
|
|
|
с |
|
|
|
|
|
|
|
|
G |
b |
|
= |
α |
G |
|
G |
|
. |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
αa, |
|
a, |
b |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
G G |
|
|
G |
G |
|
||||||
|
3˚. |
Распределительн е св йство: |
|
|
|
|
|
|
|
|
|
+ b, c |
=[a, c] |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
a |
|
+ b, c |
. |
|||||||||||||||||||||||||||
|
4˚. |
G |
G |
G |
для люб го вект ра a . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
[a, a] |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Геометрические свойства векторного произведения векторов: |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
G |
G |
равен площади |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Т |
Модуль вектора |
Sпар параллелограмма, построен- |
||||||||||||||||||||||||||||||||||||
|
a, |
b |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ного на вектор х a и b . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Площадь параллелограмма, построенного на векторах a и bG, равна |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
S |
|
|
JJJG |
JJJG |
|
G |
|
|
|
|
|
G |
G |
|
|
G |
G |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
пар |
=| AD | |
| BE |=| b | |
h =| b || a | sin(a , b) . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лекция 4 |
|
|
|
|
Необходимым и достаточным условием коллинеарности двух векторов |
||||||||||||||||||||||||||||||||||||
|
Т |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
является равенство нулю их векторного произведения. |
. |
ru |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
Доказательство: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Необходимость. Пусть aG |
|
и b коллинеарны. |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
G G |
|
|
G |
|
|
G |
|
|
|
|
|
G |
|
G |
|
|
|
|
|
|
|
G |
|
G |
|
G |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Тогда |
[a , b] |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
[a , b] = 0 . |
|
|
|
|
|||||||||||||||
|
|
|
=| a | | b | sin (a , b )= 0 |
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
Достаточность. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
G G |
|
G |
|
|
|
|
G |
|
G |
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
G |
|
G |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Пусть [a,b] = 0 |
|
[a , b] |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
||||||||||||||
|
|
|
| a | | b | sin (a , b )= 0 . |
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
||
|
|
|
Тогда существуют три возможности: 1) либо sin (a , b )= 0 , |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) либо aG = 0 , |
|
|
|
|
|
||||||||||
|
|
|
|
G G |
|
|
|
|
|
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
3) либо b = 0 . |
|
|
G |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
n |
|
|
|
|
|
n |
|
|
|
|
a коллинеарен b ; 2) и 3) a коллинеарен b |
||||||||||||||||||||||||
|
|
|
1) sin (a , b )= 0 |
(a |
, b )= 0, |
||||||||||||||||||||||||||||||||||
|
|
|
по определению. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Выражение векторного произведения через координаты сомножите- |
||||||||||||||||||||||||||||||||||||
|
Т |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
лей. Если два вектора aG |
и b заданы своими декартовыми координатами |
|||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
aG = |
{ |
x , y , z |
, b = |
{ |
x , y |
, z |
2} |
, |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
1} |
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
||||||||||||
|
|
|
то их векторное произведение имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
G |
|
|
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
c = |
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
a, |
={y1z2 − z1 y2 , z1x2 − x1z2 , x1 y2 − y1x2}, |
|
|
||||||||||||||||||||||||||||||
|
|
|
или в виде симв лическ г |
спределителя (более удобном для запомина- |
|||||||||||||||||||||||||||||||||||
|
|
|
ния): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iG |
|
|
Gj |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
G |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
x |
|
|
y |
|
|
z |
. |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
c = a, |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
y2 |
|
|
z2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
Доказ тельство: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Тройка {iG, |
Gj, k} - пр вая. Преобразуем: |
|
|
|
|
|
|
|
|
|
|
G |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
G |
G |
G |
|
|
|
|
G |
|
|
G |
|
|
|
G |
|
|
|
G |
|
|
G |
|
|
|
|||||||||
|
|
|
|
|
|
c = a ×b |
= (x1i |
|
+ y1 j |
+ z1k )× |
(x2i |
|
+ y2 j |
+ z2k ) |
= |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
G G |
|
|
|
|
|
G |
G |
|
|
|
|
|
G |
|
|
+ |
|
|
|
||||||||||
|
|
|
|
|
|
= x1 x2 i |
× i |
|
+ x1 y2 i |
× |
|
j |
|
+ x1 z2 i × k |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
G G |
|
|
|
|
|
G G |
|
|
|
|
G |
|
|
+ |
|
|
|
|||||||||||||
|
|
|
|
|
|
+ y1x2 j |
×i |
|
+ y1 y2 j × j |
+ y1z2 j |
×k |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
+z x |
2 |
kG |
×iG |
|
+ z y |
2 |
kG |
× Gj |
+ z z |
2 |
kG×kG . |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
51 |
||
|
Заметим, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
||||
|
|
|
G G |
G G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
G |
|
|
|
|
G G |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
i |
|
×i |
|
= j × j |
|
= k ×k |
|
=0, i |
|
× j |
= |
− j ×i |
|
= k, |
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
iG×kG = − kG×iG = −Gj, |
Gj ×kG |
|
|
= − kG |
× Gj = iG |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
С учетом этих равенств выражение для c |
можно представить в видеru |
: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
G |
G |
|
= ( y1z2 − z1 y2 ) i −( |
|
|
x1z2 − z1x2 ) |
G |
|
|
|
|
|
. |
G |
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
a, b |
|
|
|
j + |
(x1 y2 − y1x2 ) |
k , |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
что можно выразить через определители: |
|
|
|
|
|
|
|
|
|
|
iG |
|
Gj |
kG |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
aG, |
G |
|
|
|
|
y |
|
z |
|
|
G |
|
|
x |
|
|
|
z |
|
|
G |
+ |
|
|
|
x |
|
|
|
y |
|
|
G |
= |
|
. |
|
|
|||||||||||||||||
|
|
b = |
|
y |
1 |
|
z |
1 |
i |
− |
|
1 |
|
|
|
|
z |
1 |
|
|
j |
|
1 |
|
|
|
y |
1 |
|
k |
x |
|
y |
z |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
x |
|
|
|
2 |
|
|
|
|
|
|
|
|
x |
|
|
|
2 |
|
|
|
|
1 |
|
1 |
1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
x2 |
|
y2 |
z2 |
|
|
|
|||||||||
|
Если два вектора aG = (x1, |
y1, z1 ) и b = (x2 , |
|
y2 , z2 ) |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
С |
|
коллинеарны, то их ко- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ординаты пропорциональны, то есть |
|
x1 |
= |
y1 |
= |
z1 |
. |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
2 |
|
|
|
z |
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4.8. Смешанное произведение векторов. Определение. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Алгебраические и геометриче кие свойства. |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Выражение через декартовы координаты сомножителей |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
О |
Если вектор aG |
|
умн жить вектсрно на вектор b , |
а результат |
aG, bG |
|
ска- |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лярно умножить на вект р c , то полученное число называется смешан- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ным произведе ием векторов a , |
|
b , |
c : ( aG, b , |
cG)= aGbGcG. |
G |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Т |
Смешанное произведе ие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
||||||||||||||||||
|
|
екомпланарных векторов a , b , |
c по абсо- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
лютной величине р вно объему параллелепипеда, построенного на этих |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
векторах, приведенных к одному началу. Оно положительно, если тройка |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
G |
G G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
, |
b , c |
|
a |
, b , c пр в я и отриц тельно, если она левая. Если же векторы a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
G |
G G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
компланарны, то a b c равно нулю. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
Доказательство: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Объем п раллелепипеда равен произведе- |
aG |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
нию площ ди основания на высоту. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
S |
|
|
|
|
|
bG, cG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
осн. |
= |
|
; |
h = |
a |
|
|
cosθ |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ |
G |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bG, cG |
|
|
|
|
aG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
cosθ |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
||||||||||||||||||||||||||||||
|
|
|
V = Sосн. h = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
= (aG , b , cG )= |
aGb cG |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
||||||||||||||||||||||||||
52 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лекция 4 |
|
|
|
|
Знак смешанного произведения зависит от знака |
cosθ : |
G GG |
> 0 , если |
|||||||||||||||||||||||||||
|
! |
|
|||||||||||||||||||||||||||||||
|
|
a b c |
|||||||||||||||||||||||||||||||
|
|
|
вектор |
aG |
направлен в ту же сторону, от плоскости, определяемой векто- |
||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
G |
|
|
G |
|
что и вектор |
|
|
G |
, т.е. когда тройка векторов правая; ана- |
|||||||||||||||||||
|
|
|
рами b и c , |
|
b, |
c |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
antigtu |
|
|
|
|
|||
|
|
|
логично доказывается, что aGb cG < 0 для левой тройки |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
плоскости, |
|||
|
|
|
Если же векторы aG, b и c компланарны, то вектор c лежит вru |
||||||||||||||||||||||||||||||
|
|
|
определенной векторами |
a и b , следовательно, прeG c |
. |
G |
G |
G |
|||||||||||||||||||||||||
|
|
|
= 0 |
([a,b |
],c )= 0 . |
||||||||||||||||||||||||||||
|
С |
|
1. |
G G |
G |
|
|
|
|
G |
G G |
G G |
|
|
G |
|
|
|
|
G G G |
|
G G |
|||||||||||
|
|
([a,b |
],c )= ([b |
,c],a)= ([c,a |
],b ), поскольку тройки |
a b c и b c a , c a b |
|||||||||||||||||||||||||||
|
|
|
имеют одинаковую ориентацию (циклическая перестановка векторов в |
||||||||||||||||||||||||||||||
|
|
|
смешанном произведении не меняет его знака). |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
Нециклическая перестановка векторов в смешанном произведении |
|||||||||||||||||||||||||||||
|
|
|
приводит к изменению ориентации тройки векторов и смене знака сме- |
||||||||||||||||||||||||||||||
|
|
|
шанного |
произведения: |
G |
G |
|
GG G |
G G G |
G GG |
|
Это |
означает, что |
||||||||||||||||||||
|
|
|
b a c |
= a c b |
= c b a |
= −ab c . |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
G G |
|
|
|
|
смешанное произведение можно записывать просто в виде a b c , так как |
||||||||||||||||||||||||||||||
|
|
|
|
G G |
G |
|
|
|
G |
G |
], |
G |
|
G |
G |
G |
]) (смешанное произведение |
зависит от |
|||||||||||||||
|
|
|
([a,b], |
c ) |
= ([b |
,c |
a) |
= (a , [b,c |
|||||||||||||||||||||||||
|
|
|
порядка сомножителей, но не зависит от того, какие сомножители связа- |
||||||||||||||||||||||||||||||
|
|
|
ны первичным знаком векторного произведения). |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
2. Критерий компланарно ти трех векторов. Необходимым и достаточ- |
||||||||||||||||||||||||||||||
|
|
|
ным условием компланарно ти трех векторов является равенство нулю |
||||||||||||||||||||||||||||||
|
|
|
их смешанного произведения. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
Доказательство: |
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
G |
GG |
|
G |
|
|
|
G |
G |
|
|
0 , то должно выполняться хотя бы одно из |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
Если a b c = |
|
a |
|
|
|
b |
,c |
|
cosθ = |
|
||||||||||||||||||||
|
|
|
условий: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
1) |
|
aG |
|
|
= 0 => векторы компланарны; |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
2) |
|
|
|
G G |
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
b,c |
|
= 0 , если b и c коллинеарны, => a , b , c - компланарны; |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
||
|
|
3) |
cosθ = 0 , тогда aG b, cG |
|
, т.е. a компланарен |
|
|
|
|
||||||||||||||||||||||||
|
|
b и c . |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G G |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
Обратно, если a |
, b , c - компланарны и не имеют место случаи 1) и 2), |
|||||||||||||||||||||||||||||
то имеет место случай 3).
|
|
Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ru |
53 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Выражение смешанного произведения через |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
декартовы координаты сомножителей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
Если три вектора |
G |
|
G |
и |
|
c |
заданы своими декартовыми координатами |
|
||||||||||||||||||||||||||||||||||||
|
|
Т |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
a |
, b |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
G |
G |
|
G |
|
|
|
|
G |
|
G |
|
|
|
G |
|
G |
|
|
G |
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
a = x1i + y1 j + z1kG, |
Gb = x2i + y2 j + z2k , |
antigtu |
|
то смешанное |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
c = x3i |
+ y3 j + z3k , |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
произведение |
a b c |
равняется определителю, |
строки которого соответ- |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
ственно равны координатам перемножаемых векторов: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
G |
G |
|
x1 |
y1 |
z1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a b c = |
x |
y |
2 |
z |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
y3 |
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Доказательство: |
|
|
|
|
kG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
G |
cG = |
iG |
|
|
Gj |
|
G |
|
y |
|
z |
|
|
G |
|
|
x |
z |
|
|
|
G |
|
|
x |
y |
|
, |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
b , |
x |
|
|
y |
2 |
z |
2 |
|
= i |
|
|
2 |
|
2 |
− j |
|
|
|
2 |
|
2 |
|
|
+ k |
|
|
2 |
|
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
y3 |
z3 |
|
|
|
|
x3 |
z3 |
|
|
|
|
|
|
x3 |
y3 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
x3 |
y3 |
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
G |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
y1 |
|
z1 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
G |
|
|
|
|
y2 |
|
z2 |
|
|
|
|
|
|
x2 |
z2 |
|
|
|
|
|
x2 |
y2 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
(a, |
b , |
c )= x1 |
y |
|
z |
|
− y1 |
x |
|
z |
|
|
+ z1 |
x |
y |
|
|
= |
x2 |
y2 |
|
z2 |
|
. |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
3 |
|
|
|
|
|
3 |
3 |
|
|
|
|
|
3 |
|
3 |
|
|
|
x3 |
y3 |
|
z3 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
Необходимым и достаточным у ловием компланарности трех векторов, |
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
С |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
заданных в декартовом бази е, является равенство нулю определителя |
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Скачано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
третьего порядка, в первой строке которого записаны координаты перво- |
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
го вектора, во второй - второгос, в третьей - третьего. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
В результате изуче ия материала, изложенного в этой лекции, |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
студент должен з |
ать: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
р зличия между ск лярными и векторными величинами; |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
определения и свойства линейных операций над векторами |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
(сложение и умножение на число); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
понятие базиса и координат вектора в данном базисе; |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
определения скалярного, векторного и смешанного произведений; |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
алгебраи еские и геометрические свойства произведений векторов; |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
выр жение произведений векторов через координаты сомножителей; |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
что вычисляется с помощью произведений векторов: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
с |
лярного (число) – длины векторов, углы, проекции, |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
ве торного (вектор) – площади треугольников и параллелограммов, |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
смешанного (число) – объемы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лекция 5 . ru
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Предметом изучения аналитической геометрии является описание геометрических объектов на плоскости и в пространстве с помощью уравнений. Методы аналитической геометрии широко используются в современном естествознании и прикладных техниче-
ских дисциплинах при построении математических моделей объектов и процессов. В лекции 5 рассматриваются наиболее простые объекты, описываемые уравнениями первой степени – плоскости и прямые. Приводятся различные виды уравнений плоскостей и прямых в пространстве, показывается, для какого типа задач тот или иной тип более уместен. Примеры иллюстрируют методы решения типичных задач.
5.1. |
Основы аналитической геометрии |
||
|
5.1.1. Уравнение поверхности |
|
|
|
5.1.2. Уравнения линии |
|
|
5.2. |
Плоскость в пространстве |
|
|
|
5.2.1. Плоскость как поверхность первого порядка. |
||
|
Общее уравнение плоскости. |
||
|
5.2.2. Неполные уравнения плоскостей |
||
|
5.2.3. Уравнения плоскости «в отрезках» |
||
|
5.2.4. Нормальное уравнение плоскости |
||
|
|
|
antigtu |
|
5.2.5. Расстояние от точки до плоскости |
||
|
5.2.6. Уравнение пло ко ти, проходящей через три данные точки |
||
|
5.2.7. Угол между двумя плоскостями |
||
|
5.2.8. Условие параллельности и перпендикулярности плоскостей |
||
5.3. |
|
с |
|
Прямая линия в пр странстве |
|
||
|
5.3.1. Вект рн е уравнение прямой |
||
|
5.3.2. Параметрические уравнения прямой |
||
|
5.3.3. Ка о ические уравнения прямой |
||
|
5.3.4. Урав е ия прямой, проходящей через две данные точки |
||
|
5.3.5. Общие урав ения прямой |
||
|
5.3.6. Ур внение пучка плоскостей, проходящих через прямую |
||
|
5.3.7. Угол между двумя прямыми. Условия параллельности |
||
|
и перпендикулярности двух прямых |
||
5.4. |
Прямая и плоскость |
|
|
|
5.4.1. То ка пересечения прямой и плоскости |
||
|
5.4.2. Угол между прямой и плоскостью. Условия параллельности |
||
|
и перпендикулярности прямой и плоскости |
||
Скачано |
|
|
|