

однажды, но с избыточностью, например, для  . На низких частотах будет использована вся таблица, а с ростом частоты только каждый 2-ой, 4-ый, 8-ой и т. д. элемент. Это легко реализуется, если в процедуре обработки прерывания придавать счетчику
. На низких частотах будет использована вся таблица, а с ростом частоты только каждый 2-ой, 4-ый, 8-ой и т. д. элемент. Это легко реализуется, если в процедуре обработки прерывания придавать счетчику  неединичное (переменное) приращение
неединичное (переменное) приращение  :
:
. (3.7.3)
Пример реализации на Си
n=N >> (int)floor(log(20E3*16/f)/log(2)); if (n==0) n=1;
Условный оператор вводит ограничение  .
.
Блок 2 процедуры обработки прерывания потребуется заменить на
K+=n;
3.8 Управление двухфазным шаговым двигателем
3.8.1 Задание
Разработать программу, которая обеспечит колебательные движения ротора шагового двигателя в диапазоне углов 0–180°. Период колебания 10 с. Двигатель должен поворачиваться на 10 шагов по часовой стрелке, затем на 10 шагов против часовой стрелки. Шаги повторяются через 0,5 с.
3.8.2 Общие сведения
Шаговый двигатель — это электрическая машина переменного тока, ротор которой может устойчиво занимать несколько фиксированных положений. Ротор меняет положение, поворачиваясь на определенный угол (шаг) при появлении импульса тока в обмотке.
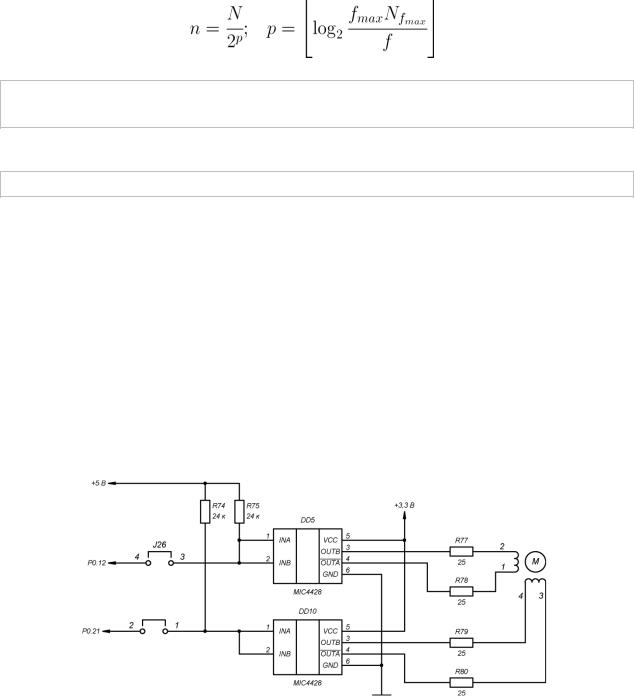
Рисунок 3.8.1 – Схема подключения шагового двигателя к микроконтроллеру
На учебной плате EA-EDU-001 установлен миниатюрный двигатель 20BY20L033 производства фирмы Finespin Motors. Двигатель имеет две обмотки. Полный оборот ротора состоит из 20 шагов (одному шагу соответствует угол поворота 18º). Обмотки двигателя включены в диагонали транзисторных мостов. Это обеспечивает смену направления тока в обмотках на обмотках. Функции мостовых преобразователей выполняют драйверы
182
MIC4428 фирмы Micrel (рисунок 3.8.1). Драйверы управляется портовыми линиями P0.12 и P0.21.Таблица 3.8.1 поясняет реакцию двигателя на импульсы тока в обмотках.
Вращение по часовой стрелке обеспечивается сменяющими друг друга состояниями 1, 6, 4, 7, против часовой стрелки — состояниями 5, 2, 8, 3.
Таблица 3.8.1 – Управление двухфазным шаговым двигателем
|
P0.12 |
P0.21 |
Направление поворота |
||||
|
ротора на один шаг (18º) |
||||||
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
2 |
1 |
|
|
|
|
|
|
3 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
4 |
1 |
|
|
|
|
|
|
5 |
|
0 |
|
|
|||
6 |
|
1 |
|
|
|||
7 |
|
0 |
|
|
|||
8 |
|
1 |
|
|
|||
Чередующиеся кодовые комбинации 00–01–11–10 на P0.12, P021 представляет собой код Грея. Код, в котором запись любых двух смежных чисел отличаются только одним двоичным разрядом.
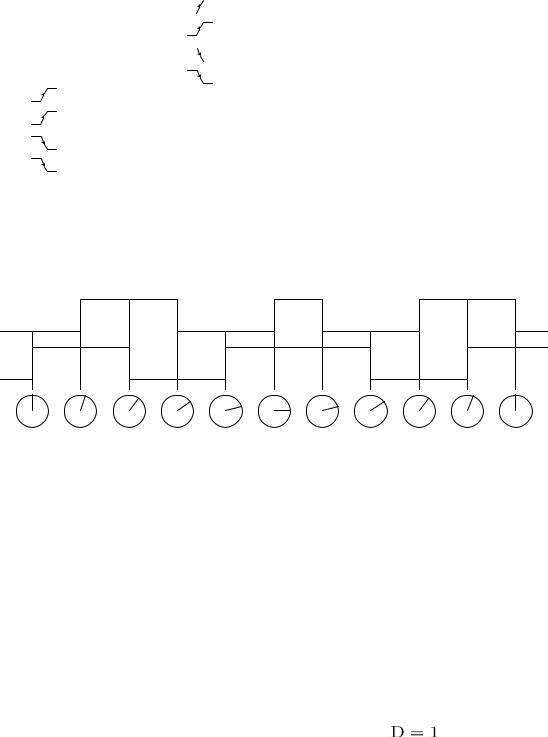
Временные диаграммы, иллюстрирующие управление двигателем, показаны на рисунке 3.8.2
P0.12 |
1 |
4 |
1 |
|
3 |
2 |
P0.21 |
6 |
7 |
6 |
8 |
5 |
8 |
Положение |
|
|
|
|
|
|
ротора |
|
|
|
|
|
|
Рисунок 3.8.2 – Временные диаграммы, поясняющие управление шаговым двигателем
3.8.3 Алгоритм программы
Задача решается с помощью таймера, генерирующего прерывания каждые 0,5 с. Процедура обработки прерываний содержит команды инверсии портовых линий в соответствии с кодом Грея. Перевод позиционного двоичного кода в код Грея рассматривается в разделе 2.1.
Поскольку здесь имеем дело лишь с четырьмя кодовыми комбинациями, проще заранее найти их, поместить в массив, а далее выводить в порт в порядке, соответствующим направлению вращения.
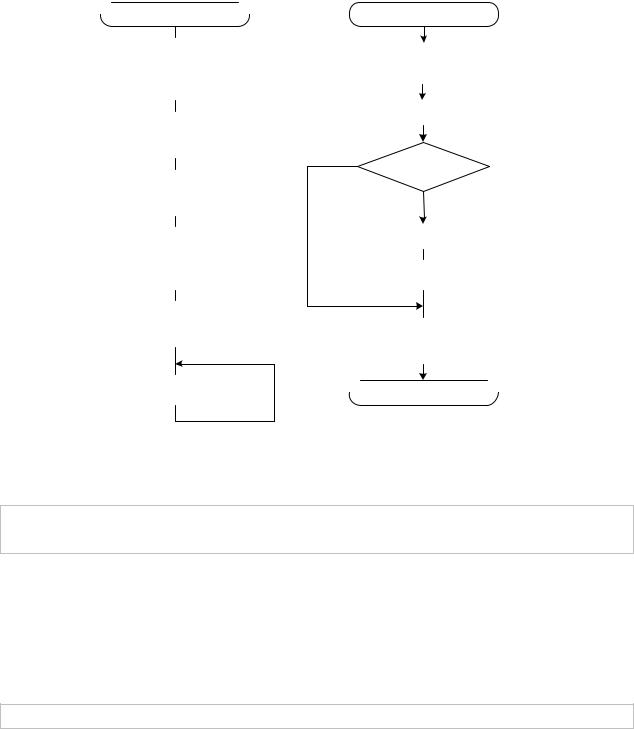
Схема алгоритма показана на рисунке 3.8.3.
В программе потребуются следующие глобальные переменные: а) целочисленный со знаком счетчик шагов  ; б) целочисленное со знаком приращение счетчика ;
; б) целочисленное со знаком приращение счетчика ;
183
Основная программа  Начало
Начало 
1  Включение
Включение
высокоскоростного режима порта 0
2  Настройка на вывод
Настройка на вывод
P0.12 и P0.21
3  Задание маски
Задание маски
для порта 0
4  Настройка таймера:
Настройка таймера:
задание порога, вкл. сброс и прерывание
5  Настройка системы
Настройка системы
прерываний
6  Пустая команда
Пустая команда
Процедура обработки прерывания |
|
|
Начало |
|
1 |
|
Вывод в порт кода |
|
P[n%4] |
|
2 |
|
n = n + D |
Нет |
3 |
|
n < 0 или n > 10 |
|
Да |
|
4 |
|
n = n – 2D |
5
D = –D
6
Инициализация
системы прерываний  Возврат
Возврат 
Рисунок 3.8.3 – Схема программы управления шаговым двигателем
в) целочисленный массив, содержащий все четыре возможные кодовые комбинации, управляющие двигателем:
unsigned int P[]= {0x00000000,0x00001000,0x00201000,0x00200000};
1.Следует включить высокоскоростной режим обмена для порта 0 (регистр SCS). Далее для обращения к порту будут использованы только регистры FIO0….
2.Настроить линии P0.12 и P0.21 на вывод (регистр FIO0DIR).
3.С помощью маскирования запретить изменение всех линий порта 0 кроме P0.12 и P0.21. Для этого записать в регистр FIO0MASK все единицы кроме двух разрядов. Проще всего сделать это командой
FIO0MASK=~0x00201000;
4. Настроить таймер:
а) задать порог таймера (T0MR0) для получения интервала времени 0,5 с; расчет проводить по формуле (1.13.3), учитывая, что по умолчанию  МГц;
МГц;
б) включить сброс таймера и формирование запроса прерывания по совпадению (регистр T0MCR);
в) включить таймер (регистр T0TCR).
5. Включить прерывание от таймера через регистры VICVectAddr0, VICVectCntl0, VICIntEnable (раздел 1.11.5).
184