


2.Необходимо убедиться, что счетчик включен (2) и не сброшен (3). После запуска программы содержимое счетчика (1) не должно быть нулевым.
3.Пороговые значения для каждого канала отображаются в таблице
(4). Нулевой порог должен быть наибольшим, далее, чаще всего, в порядке возрастания.
4.Обычно остановка отключена (5), а сброс счетчика включен для нулевого порога (видно также и в таблице в столбцах Reset и Stop).
5.Убедиться, что все задействованные каналы ШИМ включены (8).
6.Установка бита PWMSELx (7) включает управление начальной фазой каждого канала.
2.4.8 Аналого-цифровой преобразователь
На этапе тестирования следует подключить к АЦП источник постоянного напряжения, величину которого контролировать вольтметром или осциллографом. Окно настроек АЦП открывается через меню Peripherals A/D Converter A/D Converter 0/1 (рисунок 4.2.9).
2 |
1 |
|
3 |
5 |
|
6 |
||
|
||
4 |
7 |
|
|
8 |
|
|
9 |
|
10 |
|
|
11 |
|
|
|
12 |
13 |
|
15 |
14 |
|
1 |
– включение; |
9 – глобальный запрос прерывания; |
|
2 |
– Выбор канала; |
10 |
– результат АЦП; |
3 |
– разрядность; |
11 |
– номер канала, от которого получен результат; |
4–5 – способ запуска; |
12 |
– состояния каналов; |
|
6 |
– тактовая частота; |
13 |
– управление прерываниями; |
7 |
– флаг завершения преобразования; |
14 |
– опорное напряжение, В; |
8 |
– флаг потери результата; |
15 |
– результаты преобразования, В |
Рисунок 2.4.9 – Окно настройки аналого-цифрового преобразователя
141

1.Убедиться, что настройки верны: АЦП включен (1); частота (6) не превышает 4,5 МГц; разрядность соответствует желаемой (3).
2.Убедиться, что выбран верный канал АЦП (2) и притом только один. Выбор нескольких каналов допускается только в режиме циклического опроса (BURST = 1).
3.Проверить, верно ли выбран способ запуска АЦП (4).
4.Поместить точку останова после цикла ожидания результата АЦП; создать условие, при котором АЦП запустится. Если остановка не произошла, следует искать ошибки в настройке узлов, запускающих АЦП (таймер или порт ввода-вывода).
5.Если результат получен, его следует сверить с ожидаемым, принимая во внимание опорное напряжение.
2.4.9 Цифро-аналоговый преобразователь
Окно управления ЦАП доступно через меню Peripherals D/A Converter (рисунок 2.4.10). Ненулевое значение в поле (1) должно немедленно приводить к установке на выходе AOUT соответствующего напряжения, которое можно измерить вольтметром или осциллографом. Если этого не происходит, значит, выход P0.25 настроен неверно.
В режиме симулятора доступно поле (2) для величины опорного напряжения. Симулятор автоматически рассчитывает выходное напряжение
(3) на основе кода и опорного напряжения.
1
2
3
1 – код управления напряжением;
2 – опорное напряжение, В;
3 – выходное напряжение
Рисунок 2.4.10 – Окно настройки ЦАП
2.4.10 Приемопередатчик SPI
1.Выполнив блок настройки, открыть окно настройки приемопере-
датчика SPI (Peripherals SPI Interface SPI0).
2.Как правило, должен быть выбран режим ведущего (5), биты полярности и фазы (6–7) сброшены.
3.Проконтролировать, верно ли выбрана очередность передачи битов
(4). Установка флага (4) ведет к передаче, начиная с младшего бита.
4.Проверить настройку разрядности (1–2). Если используется разрядность (2), отличная от 8 бит, флаг (1) должен быть установлен.
5.Проверить значение битовой скорости (9). Рекомендуются значения от сотен килогерц до единиц мегагерц (не более 7,5 МГц).
6.Рекомендуется с помощью точки останова остановить программу на команде передачи, то есть присваивания регистру S0SPDR. Подключить к
142

выходу SCK цифровой осциллограф в режиме однократной или ждущей развертки; выполнить команду передачи (F10/F11). На осциллографе должны появиться тактовые импульсы, в окне должен установиться флаг SPIF (8). Так же следует просмотреть сигналы на линиях MOSI, MISO.
Если при правильной настройке осциллографа осциллограмма не зафиксирована, значит, передача не выполнялась, вероятно, из-за ошибочного выбора режима портовых линий.
1  2
2 
 3
3  4
4  5
5  6
6  7
7
 8 9
8 9
10
1–2 – управление разрядностью;
3– разрешение запроса прерывания;
4– очередность (первый бит младший/старший);
5– режим (ведущий/ведомый);
6–7 – управление полярностью и фазой;
8 – диагностика;
9– скорость бит/с;
10– активность запроса прерывания
Рисунок 2.4.11 – Окно настройки приемопередатчика SPI
Внимание! Открытое окно SPI приводит к тому, что регистры S0SPSR и S0SPDR время от времени считывается через интерфейс JTAG. Это дает автоматический сброс флагов в S0SPSR. В частности сбрасывается флаг готовности SPIF. Поэтому при открытом окне цикл ожидания окончания передачи зависнет. Флаг готовности установится и сбросится на следующем же шаге трассировки.
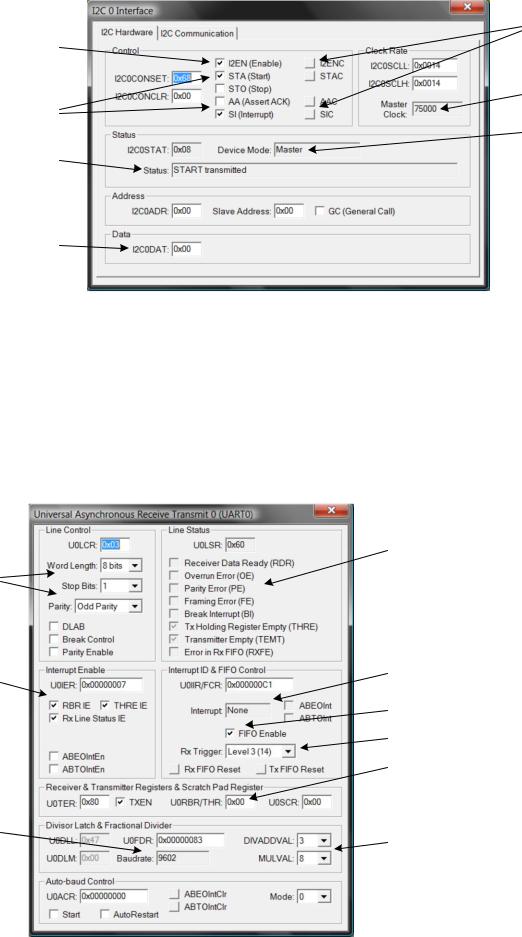
2.4.11 Приемопередатчик I2C
Окно настроек I2C доступно через меню Peripherals I2C I2C0/1 (рисунок 2.4.12). Во время отладки полезно наблюдать за сигналами SCL, SCK с помощью цифрового осциллографа в режиме однократной разверстки.
1.Прежде всего, необходимо проверить, что модуль I2C включен (1) в режиме ведущего (3). Убедиться, что скорость не превышает 400 кГц (5).
2.Установить точку останова на команде установки состояния START; выполнить команду и убедиться что состояние (6) изменилось.
3.Установить точку останова на конструкции switch {...}, используемой для анализа нового состояния. Выполнить программу до этой точки, а затем выполнять в пошаговом режиме (F10/F11), наблюдая за тем, как состояния сменяют друг друга при сбросе флага готовности в регистре
I2CxCONCLR.
Возможные причины ошибок: неверная настройка режимов портовых линий либо ошибочная последовательность чередования состояний I2C.
143
|
|
|
|
4 |
|
|
1 |
|
|
|
|
|
|
|
|
5 |
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|
1 |
– включить; |
|
4 – сброс состояний; |
|
6 – текущее состояние; |
|
|
||||
2 |
– установка состояний; |
|
5 – скорость, бит/с; |
|
7 – данные |
3 |
– режим (ведущий/ведомый); |
|
|
|
|
Рисунок 2.4.12 – Окно настройки приемопередатчика I2C
2.4.12 Приемопередатчик UART
Рекомендуется наблюдать с помощью цифрового осциллографа сигнал на линии RxD, TxD. Окно настроек приемопередатчика UART открыва-
ется через меню Peripherals SPI Interface UART UART0 (рису-
нок 2.4.13).
|
|
1 |
– настройка |
разрядно- |
|
|
|
сти, числа |
стоповых |
|
6 |
|
бит и четности; |
|
1 |
|
2 |
– включение; |
|
|
3 |
– уровень буфера при- |
||
|
|
|||
|
|
|
емника, вызывающий |
|
|
|
|
прерывание; |
|
|
|
4 |
– настройка скорости; |
|
|
|
5 |
– текущая скорость; |
|
7 |
8 |
6 – текущее сосание и ди- |
||
|
|
агностика; |
|
|
|
|
|
|
|
|
2 |
7 |
– настройка |
прерыва- |
|
3 |
|
ний; |
|
|
8 |
– идентификация пре- |
||
|
|
|||
|
9 |
|
рываний; |
|
|
|
9 – принятый или переда- |
||
|
|
|
ваемый байт |
|
5 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.4.13 – Окно настройки приемопередатчика UART
144