

{
case Значение1:
... ; // Блок операторов 1 break;
case Значение3:
... ; // Блок операторов 3 break;
...
default
... ; // Блок операторов N
}
Выполняется условный переход на одно из Значений Выражения. Если ни одно из указанных Значений не соответствует реальному значению, то происходит переход на точку default. Заметим, что после выполнения любого блока операторов будет продолжено выполнение операторов всех других блоков ниже, если в конце не дать команду выхода break.
2.2.14 Цикл со счетчиком
Конструкция цикла со счетчиком имеет вид
for (Команда1; Выражение; Команда2)
{
... ; // Операторы
}
Команда1 выполняется перед выполнением всего цикла; обычно содержит команду присваивания счетчику начального значения. Цикл повторяется пока Выражение не равно нулю; как правило, Выражение имеет вид операции отношения вида
Счетчик < Предельное_значение
Команда2, чаще всего представляет собой инкремент или декремент счетчика, например k++. Команда1 и Команда2 могут отсутствовать. В качестве вечного цикла можно использовать конструкцию
for (;;)
{
... ; // Операторы
}
Оператор continue досрочно прекращает текущую итерацию и начинает следующую; оператор break досрочно завершает весь цикл.
2.2.15 Циклы с предусловием и постусловием
Конструкция цикла с предусловием имеет вид
while (Выражение)
{
... ; // Операторы
}
111
Тело цикла выполняется по крайней мере один раз независимо от значения Выражения, а затем повторяется пока целочисленное Выражение не равно нулю. Часто используется такая конструкция для вечного цикла
while (1)
{
... ; // Операторы
}
Конструкция цикла с предусловием имеет вид
do
{
... ; // Операторы
} while (Выражение)
Если Выражение равно нулю, тело цикла не выполняется ни разу. Здесь также допустимо использование операторов continue и break.
2.2.16 Функции
Функция объявляется по шаблону
Тип Имя(Параметр1,...,ПараметрN)
{
... ; // Тело функции return Выражение ;
}
Если не предполагается возврат результата и включение функции в правую часть оператора присваивания, то в качестве типа указывается пустой тип void и оператор return опускается. Список параметров также может быть опущен.
Вызов функции осуществляется по ее имени, после которого в скобках перечисляются параметры. Скобки обязательны, даже если параметры отсутствуют.
С сущности в Си не существует понятия выходных параметров. Результат может присваиваться только самой функции. Разумеется, часто этого недостаточно.
Для того чтобы функция могла возвращать измененные данные в основную программу, в качестве параметра функции передают указатель на переменную, массив или структуру. Сам параметр и в этом случае остается неизменным, но функция получает возможность записи в область памяти, на которую ссылается указатель и доступную для чтения в основной программе.
При объявлении функции такие параметры описывают как указатели (с символом * перед именем), а при вызове функции передают не саму переменную, а адрес (указывая перед именем символ взятия адреса &).
Ниже приведен пример функции, иллюстрирующий передачу нескольких параметров, в том числе массива С.
int Function(char A, int *B, char *C)
{
112

A+=10;
C[5]=*B+A;
*B=0; return 1;
}
int main()
{
A=5; B=10; C[5]=20;
D=Function(A,&B,C); //A=5,B=0,C[5]=25,D=1
}
Здесь при вызове функции ей передается входной параметр A (без возможности изменения) и два выходных параметра (с возможностью изменения): целое B и массив C. Видно, что в результате выполнения функции A не изменилась, несмотря на то, что внутри функции ей присвоено новое значение. В то же время изменилась переменная B и пятый элемент массива C. Переменная D получила единичное значение, возвращенное через команду return.
2.2.17 Некоторые директивы компилятора
Директивы не являются частью программы и не компилируются в инструкции процессора, а управляют процессом компиляции. Здесь коснемся лишь двух наиболее часто встречающихся директив
Директива присоединения файла.
#include "Имя_файла"
или
#include <Имя_файла>
В Си-программу будет «вшит» заданный файл. Это может быть файл заголовков (*.h), в котором описаны переменные, константы или функции, а может быть другая Си-программа (*.C).
Если имя указано в двойных кавычках, то поиск файла будет осуществляться сначала в текущем каталоге, где находится проект, а затем, в стандартных каталогах компилятора. Если использованы треугольные скобки (знаки «больше» и «меньше»), то поиск в текущем каталоге будет пропущен.
Директива подстановки имеет следующий вид.
#define Имя Значение
Такая команда вводит символическое обозначение Имя для Значения. Далее вместо имени будет подставляться присвоенное ему значение. В отличие от переменной память для постоянного хранения данных при этом не выделяется.
2.2.18 Библиотека математических функций MATH.h
Для использования в программе математических функций необходимо в начале подключить библиотеку директивой
#include <math.h>
При этом станут доступны функции, приведенные в таблице 2.2.2.
113
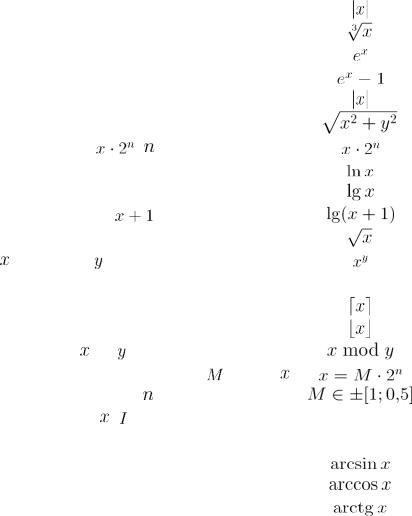
Таблица 2.2.2 – Основные математические функции библиотеки MATH.h
Функция |
Объявление функции |
Описание |
|
Действие |
|
Основные |
|
|
|
abs(x) |
int abs(int x) |
модуль целого аргумента |
|
|
cbrt(x) |
double cbrt(double x) |
кубический корень |
|
|
exp(x) |
double exp(double x) |
экспонента |
|
|
expm1(x) |
double expm1(double x) |
экспонента, уменьшенная на единицу |
|
|
fabs(x) |
double fabs(double x) |
модуль вещественного аргумента |
|
|
hypot(x,y) |
double hypot(double x, double y) |
корень из суммы квадратов аргументов |
|
|
|
|
|
|
|
ldexp(x) |
double ldexp(double x, int n) |
возвращает значение , целое |
|
|
log(x) |
double log(double x) |
натуральный логарифм |
|
|
log10(x) |
double log10(double x) |
десятичный логарифм |
|
|
log1p(x) |
double log1p(double x) |
натуральный логарифм |
|
|
sqrt(x) |
double sqrt(double x) |
квадратный корень |
|
|
pow(x,y) |
double pow(double x, double y) |
возводит в степень |
|
|
|
Округление, остаток от деления, выделение целой и дробной части |
|
|
|
ceil(x) |
double ceil(double x) |
округление до большего целого |
|
|
floor(x) |
double floor(double x) |
округление до меньшего целого |
|
|
fmod(x,y) |
double fmod(double x, double y) |
остаток от деления на |
|
|
frexp(x,&n) |
double frexp(double x, int *n) |
возвр. нормализованную мантиссу |
числа |
|
и экспоненциальную часть , как степень 2 |
|
|||
|
|
|
||
modf(x,&I) |
double modf(double x, double *I) |
возвр. дробную часть , — целая часть |
|
|
|
Тригонометрические и обратные тригонометрические |
|
|
|
asin(x) |
double asin(double x) |
арксинус |
|
|
acos(x) |
double acos(double x) |
арккосинус |
|
|
atan(x) |
double atan(double x) |
арктангенс |
|
|
114
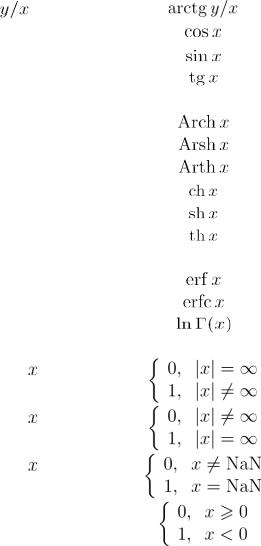
Таблица 2.2.2 – Продолжение
Функция |
Объявление функции |
Описание |
Действие |
atan2(x) |
double atan2(double x, double y) |
арктангенс отношения |
|
cos(x) |
double cos(double x) |
косинус |
|
sin(x) |
double sin(double x) |
синус |
|
tan(x) |
double tan(double x) |
тангенс |
|
|
Гиперболические и обратные гиперболические |
|
|
acosh |
double acosh(double x) |
гиперболический арккосинус |
|
asinh |
double asinh(double x) |
гиперболический арксинус |
|
atanh |
double atanh(double x) |
гиперболический арктангенс |
|
cosh(x) |
double cosh(double x) |
гиперболический косинус |
|
sinh(x) |
double sinh(double x) |
гиперболический синус |
|
tanh(x) |
double tanh(double x) |
гиперболический тангенс |
|
|
Специальные |
|
|
erf(x) |
double erf(double x) |
функция ошибок |
|
erfc(x) |
double erfc(double x) |
дополнительная функция ошибок |
|
lgamma(x) |
double lgamma(double x) |
логарифм гамма-функции |
|
|
Тестирование чисел в формате IEE754 |
|
|
isfinite(x) |
double isfinite(double x) |
возвращает единицу, если |
|
не равен бесконечности |
|
||
|
|
|
|
|
|
|
|
isinf(x) |
double isinf(double x) |
возвращает единицу, если |
|
равен бесконечности |
|
||
|
|
|
|
|
|
|
|
isnan(x) |
double isnan(double x) |
возвращает единицу, если |
|
равен неопределенности |
|
||
|
|
|
|
|
|
|
|
signbit(x) |
int signbit(double x) |
возвращает знаковый разряд числа |
|
|
|
|
|
115