

Отладчики подключаются к компьютеру через интерфейс USB (J-Link Ultra также поддерживает Ethernet). Эксплуатация прибора не вызывает трудностей. При первом подключении будет запрошена установка драйвера, который находится на диске, входящем в комплект поставки. Среда Keil µVision 4 поддерживает J-Link. Поэтому дополнительное программное обеспечение не потребуется. Практически не требуется и никакая настройка, кроме простейших действий, рассмотренных в разделе 2.3.3.
Программатор поддерживает большинство микроконтроллеров се-
мейств ARM7, ARM9, Cortex-M3, Cortex-M4.
2.6.3 Утилиты программирования ПЗУ LPC Flash Utility и FlashMagic
Микроконтроллеры семейства LPC200 поддерживают загрузку исполнимого кода программы через интерфейс UART. За эту возможность отвечает загрузчик, размещенный в ПЗУ на заводе-изготовителе. Связь UART с персональным компьютером может обеспечиваться через RS-232 или USB посредством микросхем, таких как MAX3232 или FT232R. Этот способ загрузки программы можно считать наиболее дешевым, потому что не требуется JTAG-программатор.
Со стороны персонального компьютера «прошивкой» могут управлять известные программы: LPC2000 Flash Utility и FlashMagic (рисунки 2.6.7, 2.6.8). Обе программы требуют сохранения исполнимого файла программы в формате HEX (раздел 2.3.3).
10 11
1 |
|
6 |
3 |
|
|
7 |
4 |
9 |
|
8 |
|
2 |
|
5 |
|
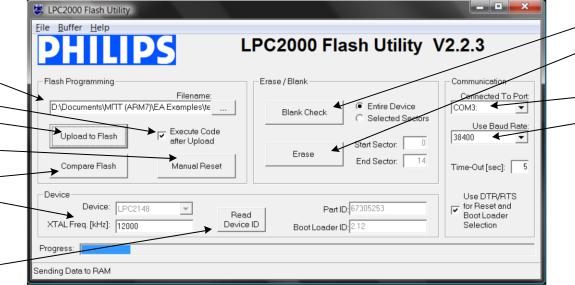
Рисунок 2.6.7 – Окно программы Philips Flash Utility
Порядок работы с LPC Flash Utility таков:
1)выбрать HEX-файл, расположенный в папке проекта;
2)ввести реальную частоту кварцевого резонатора микроконтроллера (в килогерцах);
3)выбрать последовательный порт, к которому подключен микроконтроллер;
4)выбрать скорость передачи данных (не более 38400 бит/с);
157
5)считать идентификатор устройства (после этого шага в поле Device должен появиться теп микроконтроллера);
6)если это необходимо установить флажок Execute Code after Upload (запустить программу после загрузки);
7)нажать кнопку Upload to Flash; начнется процесс загрузки. Помимо загрузки программы имеется возможность сравнения вы-
бранного HEX-файла с содержимым Flash-памяти микроконтроллера (8). Сброс микроконтроллера можно выполнить кнопкой (9).
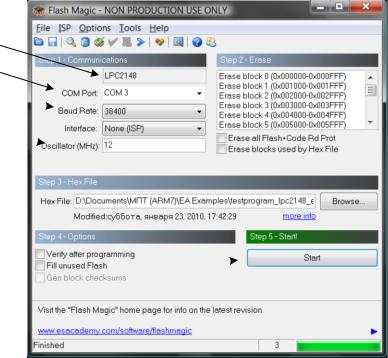
Программа Flash Magic позволяет «прошивать» микроконтроллеры и других семейств производства NXP, например 8051. Для записи исполнимого кода необходимы следующие действия: выбрать тип устройства кнопкой Select Device (1); выбрать последовательный порт (2); выбрать скорость передачи данных (не более 38400 бит/с) (3); ввести частоту кварцевого резонатора в мегагерцах (4); выбрать загружаемый HEX-файл (5); нажать кнопку
Start (6).
1 2
3
4
5
6 
Рисунок 2.6.8 – Окно программы Flash Magic
2.6.4 Программа-терминал 232Analyzer
Для взаимодействия с микроконтроллером по интерфейсу RS-232 потребуется программа-терминал. Простейший терминал, как известно, входит в комплект поставки Windows, однако пользоваться им крайне неудобно. Еще более простая и, тем не менее, удобная программа называется TTY. Программа довольно старая и сегодня найти ее трудно.
Проведя обзор современных программ-терминалов, авторы рекомен-
дуют 232Analyzer (рисунок 2.6.9).
Выбор и настройка порта RS-232 выполняется меню (2), вынесенными на панель инструментов программы. Для установки подключения нужно
158
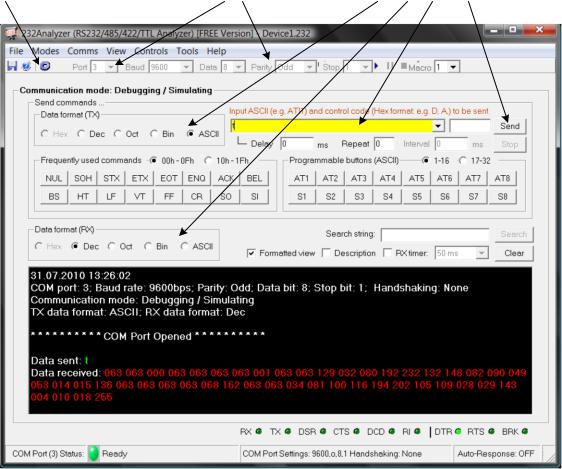
нажать кнопку (1). Флаги (3–4) позволяют выбрать формат передаваемой и принимаемой информации.
Для передачи символа, он или его код вводится в поле 5 и нажимается кнопка Send (6). Если нужно передать несколько символов в формате ASCII, они водятся подряд. Если передается последовательность кодов, то они разделяются запятой. Причем запятая ставится и в конце последнего кода. Над строкой (5) появляется подсказка с примером.
1 |
2 |
3 |
4 |
5 |
6 |
Рисунок 2.6.9 – Окно программы 232Analyzer
2.6.5 Низкоуровневый редактор диска DMDE
В разделе рассматривается взаимодействие с картами Flash-памяти стандарта MMC/SD. Для тестирования программы необходима возможность считывать и записывать информацию на карту на низком уровне с персонального компьютера. Для этого удобен редактор дисков DMDE 2.0.
После запуска программы следует перейти в режим «Физические секторы» с помощью одноименного пункта меню Редактор. Выбрать текущий диск можно через меню Диск Выбрать диск.
По умолчанию программа работает в режиме «только чтение». Изменение информации на диске становится возможным после включения режима Правка Режим редактирования. Для сохранения всех внесенных изме-
нений служит меню Правка Сохранить изменения.
159