

Рисунок 1.8.1 – Настройка модуля ускорения памяти (MAM)
спомощью инструмента Configuration Wizard
Втехническом описании производителя утверждается, что длительность цикла обращения к памяти не должна быть меньше 50 нс. Соответственно при тактовых частотах до 20 МГц для обращения к памяти программ рекомендуется выделять 1 такт; при тактовой частоте 20–40 МГц — 2 такта; 40–60 МГц — 3 такта. Однако авторы считают, что в большинстве случаев следует выделять один такт при тактовых частотах до 40 МГц и два такта при тактовых частотах 40 МГц и выше.
Можно рекомендовать подбирать настройку модуля MAM, опираясь на экспериментально измеренное время выполнения фрагмента программы. Для этого в начале и конце фрагмента следует включить отладочные команды, формирующие логический сигнал на одном из свободных выводов МК. Для измерений необходим цифровой осциллограф.
Взаключение отметим, что возможно выполнение фрагмента программы абсолютно без потерь производительности, если его разместить в оперативной памяти (см. раздел 2.3.8).
1.9 Внешние выводы микроконтроллера
1.9.1 Служебные контакты
Микроконтроллер LPC2148 выпускается в корпусе LQFP размером 10×10 мм с 64 контактами (шаг 0,5 мм). Контакты микроконтроллера можно разделить на две группы: служебного назначения, например, для подключения источника питания, и программно-управляемые линии ввода-вывода, предназначенные для обмена цифровыми и аналоговыми сигналами с внешней средой. Краткое описание служебных контактов микроконтроллера LPC214x приведено в таблице 1.9.1.
1.9.2 Программно-управляемые линии ввода-вывода
Контакты, не включенные в таблицу 1.9.1, предназначены для ввода и вывода цифровых и аналоговых сигналов. Каждый из них может работать в режиме двунаправленного цифрового входа-выхода. В связи с этим контакты сгруппированы в два 32-разрядных параллельных порта, называемых
30

«порт 0» и «порт 1». В них не все разряды реализованы физически. Принято порты обозначать «P0» и «P1», а номера линий порта указывать через точку, например «P0.14» или «P1.23». Цифровые сигналы могут формироваться или считываться с портов под управлением программы (раздел 1.10). Основные электрические характеристики портовых линий приведены в таблице 1.9.2.
Таблица 1.9.1 – Назначение служебных контактов МК LPC2148
Обознач. |
Контакт |
Назначение |
|
Vdd |
23, 43, 51 |
Питание цифровой части (3,0–3,6 В) |
|
Vdda |
7 |
Питание аналоговой части (3,0–3,6 В) |
|
Vss |
6, 18, 25, 42, 50 |
Общая точка цифровой части |
|
Vssa |
59 |
Общая точка аналоговой части |
|
|
|
Вход сброса. Низкий лог. уровень переводит |
|
|
57 |
микроконтроллер в режим сброса. В рабочем |
|
|
|
режиме должен быть подан высокий уровень |
|
XTAL1 |
62 |
Контакты для подключения основного кварцево- |
|
го резонатора. На контакт XTAL1 может быть |
|||
|
|
||
XTAL2 |
61 |
||
подан внешний тактовый сигнал |
|||
|
|
||
RTCX1 |
3 |
Контакты для подключения кварцевого резона- |
|
RTCX2 |
5 |
тора для тактирования часов реального времени |
|
D+ |
10 |
Двунаправленная линия передачи данных ин- |
|
D– |
11 |
терфейса USB |
|
Vref |
63 |
Опорное напряжение АЦП и ЦАП (2,5–3,6 В) |
|
Vbat |
49 |
Питание часов реального времени (2,0–3,6 В) |
Отметим, что реальные логические уровни, существенно отличаются от предельных. Так в условиях, близких к нормальным, экспериментально можно установить, что:  В,
В,  В.
В.
Таблица 1.9.2 – Электрические параметры цифровых портовых линий
Параметр |
Значение |
Предельно допустимое напряжение в режиме входа, В |
|
Выходной уровень логической единицы, В, не менее |
|
Выходной уровень логического нуля, В, не более |
0,4 |
Входной уровень логической единицы, В, не менее |
2,0 |
Входной уровень логического нуля, В, не более |
0,8 |
Ток в режиме входа, мкА, не более |
3 |
Предельный выходной ток, мА |
50 |
Предельный ток через каждый контакт Vdd и Vss, мА |
100 |
1.9.3 Альтернативные функции линий ввода вывода
Портовые линии совмещают основную функцию (цифровой вводвывод) с несколькими альтернативными функциями. Они служат входами или выходами многочисленных периферийных устройств, встроенных в микроконтроллер, таких как счетчики, АЦП и ЦАП.
31
32
PINSEL1 – настройка входов внешних прерыыаний
31 P0.30 27 24 23 20 19 16 15 12 11 P0.20 7 4 3 P0.16
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
0 |
1 |
|
|
EINT3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EINT3 |
|
|
|
|
|
|
EINT0 |
|||
PINSEL0 – настройка входов внешних прерыыаний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
P0.15 |
P0.14 |
27 |
|
|
24 |
23 |
|
|
20 |
P0.9 |
|
16 |
P0.7 |
|
12 |
11 |
|
|
8 |
P0.3 |
|
4 |
P0.1 |
|
0 |
||||||
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
1 |
1 |
|
|
1 |
1 |
|
|
|
|
|
|
1 |
1 |
|
|
1 |
1 |
|
|
EINT2 |
EINT1 |
|
|
|
|
|
|
|
|
EINT2 |
|
|
EINT2 |
|
|
|
|
|
|
EINT1 |
|
|
EINT0 |
|
|
||||||
PINSEL1 – настройка входов таймеров-счетчиков |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
31 |
|
P0.30 |
P0.29 |
P0.28 |
23 |
|
|
20 |
19 |
|
|
16 |
15 |
|
P0.22 |
P0.21 |
P0.20 |
P0.19 |
P0.18 |
P0.17 |
P0.16 |
||||||||||
|
|
1 |
1 |
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
|
|
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
CAP0.0 |
CAP0.3 |
CAP0.2 |
|
|
|
|
|
|
|
|
|
|
CAP0.0 |
CAP1.3 |
MAT1.3 |
MAT1.2 |
CAP1.3 |
CAP1.2 |
MAT0.2 |
||||||||||
|
|
|
|
MAT0.3 |
MAT0.2 |
|
|
|
|
|
|
|
|
|
|
MAT0.0 |
|
|
|
|
CAP1.2 |
MAT1.3 |
MAT1.2 |
CAP0.2 |
|||||||
PINSEL0 – настройка входов таймеров-счетчиков |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
31 |
|
|
28 |
P0.13 |
P0.12 |
P0.11 |
P0.10 |
19 |
|
|
16 |
15 |
|
P0.6 |
P0.5 |
P0.4 |
P0.3 |
P0.2 |
3 |
|
|
0 |
|||||||||
|
|
|
|
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
|
|
|
|
|
|
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
MAT1.1 |
MAT1.0 |
CAP1.1 |
CAP1.0 |
|
|
|
|
|
|
CAP0.2 |
MAT0.1 |
CAP0.1 |
MAT0.0 |
CAP0.0 |
|
|
|
|
|||||||||
PINSEL1 – настройка выходов ШИМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
31 |
|
|
28 |
27 |
|
|
24 |
23 |
|
|
20 |
19 |
|
|
16 |
15 |
|
|
12 |
P0.21 |
|
8 |
7 |
|
|
4 |
3 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PWM5 |
|
|
|
|
|
|
|
|
|
|
|
PINSEL0 – настройка выходов ШИМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
31 |
|
|
28 |
27 |
|
|
24 |
23 |
|
|
20 |
P0.9 |
P0.8 |
P0.7 |
|
12 |
11 |
|
|
8 |
7 |
|
|
4 |
P0.1 |
P0.0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
PWM6 |
PWM4 |
PWM2 |
|
|
|
|
|
|
|
|
|
|
PWM3 |
PWM1 |
|||||
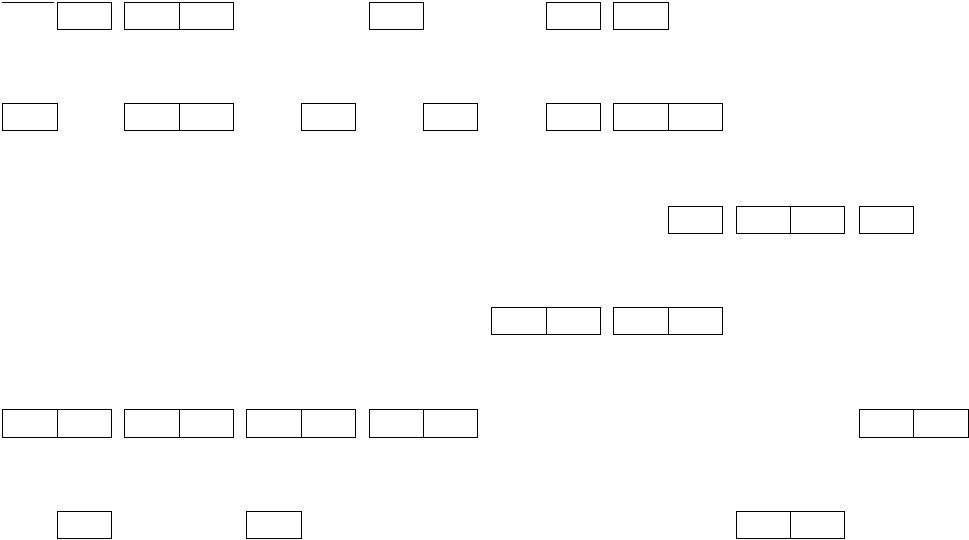
Рисуноук1.9.1 – Схема регистров управления альтернативными функциями портов ввода-вывода
33
PINSEL1 – настройка входов АЦП
31 P0.30 P0.29 P0.28 23 20 P0.25 16 15 P0.22 P0.21 8 7 4 3 0
|
|
0 |
1 |
0 |
1 |
0 |
1 |
|
|
|
|
0 |
1 |
|
|
|
|
0 |
1 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
AD0.3 |
AD0.2 |
AD0.1 |
|
|
|
|
AD0.4 |
|
|
|
|
AD1.7 |
AD1.6 |
|
|
|
|
|
|
|
|
|
|
||||||
PINSEL0 – настройка входов АЦП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
P0.15 |
|
28 |
P0.13 |
P0.12 |
23 |
|
P0.10 |
19 |
|
P0.8 |
15 |
|
P0.6 |
P0.5 |
P0.4 |
7 |
|
|
4 |
3 |
|
|
0 |
||||||||
1 |
1 |
|
|
1 |
1 |
1 |
1 |
|
|
1 |
1 |
|
|
1 |
1 |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
AD1.5 |
|
|
AD1.4 |
AD1.3 |
|
|
AD1.2 |
|
|
AD1.1 |
|
|
AD1.0 |
AD0.7 |
AD0.6 |
|
|
|
|
|
|
|
|
||||||||
PINSEL1 – настройка линий SPI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
31 |
|
|
28 |
27 |
|
|
24 |
23 |
|
|
20 |
19 |
|
|
16 |
15 |
|
|
12 |
11 |
|
P0.20 |
P0.19 |
P0.18 |
P0.17 |
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SSEL1 |
MOSI1 |
MISO1 |
SCK1 |
|
|
||||
PINSEL0 – настройка линий SPI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
31 |
|
|
28 |
27 |
|
|
24 |
23 |
|
|
20 |
19 |
|
|
16 |
P0.7 |
P0.6 |
P0.5 |
P0.4 |
7 |
|
|
4 |
3 |
|
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SSEL0 |
MOSI0 |
MISO0 |
SCK0 |
|
|
|
|
|
|
|
|
||||
PINSEL0 – настройка линий UART |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
P0.15 |
P0.14 |
P0.13 |
P0.12 |
P0.11 |
P0.10 |
P0.9 |
P0.8 |
15 |
|
|
12 |
11 |
|
|
8 |
7 |
|
|
4 |
P0.1 |
P0.0 |
||||||||||
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
1 |
|
RI |
DCD |
DTR |
DSR |
CTS |
RTS |
RxD1 |
TxD1 |
|
|
|
|
|
|
|
|
|
|
|
|
RxD0 |
TxD0 |
|||||||||
PINSEL0 – настройка линий I2С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
31 |
|
P0.11 |
27 |
|
|
24 |
P0.11 |
|
20 |
19 |
|
|
16 |
15 |
|
|
12 |
11 |
|
|
8 |
P0.3 |
P0.2 |
3 |
|
|
0 |
||||
|
|
1 |
1 |
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
1 |
|
|
|
|
|
|
SDA1 |
|
|
|
|
SCL1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SDA0 |
SCL0 |
|
|
|
|
||||
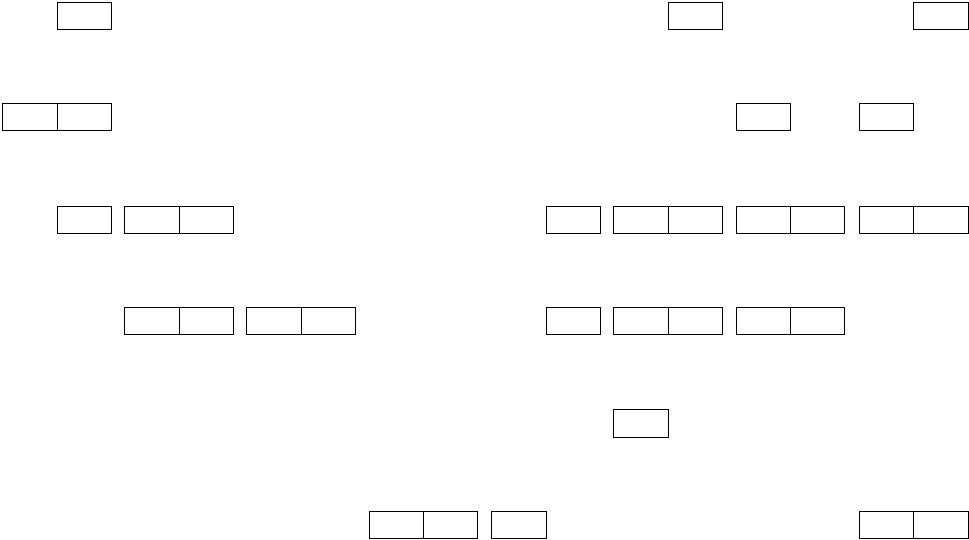
Рисунок 1.9.2 – Схема регистров управления альтернативными функциями портов ввода-вывода

Выбор основной или альтернативной функции линий порта 0 осуществляется путем записи управляющего кода в регистры PINSEL0 и PINSEL1. Имеется также регистр PINSEL2, предназначенный для переключения линий порта 1 в отладочный режим, который здесь не рассматривается.
Управляющие коды и соответствующие им альтернативные функции портовых линий приведены в таблицах 1.9.3, 1.9.4. На рисунках 1.9.1 и 1.9.2 показаны схемы регистров PINSEL0 и PINSEL1, сгруппированы по периферийным устройствам.
Прежде чем использовать какое-либо встроенное периферийное устройство, требующее взаимодействия с внешней средой, необходимо с помощью таблиц 1.9.3, 1.9.4 или рисунков 1.9.1, 1.9.2 определить, какие контакты МК могут использоваться для обмена сигналами с данным устройством и внедрить в программу команды перевода выбранных линий в альтернативный режим.
Таблица 1.9.3 – Управление функциями внешних выводов через PINSEL0
Биты |
Конт. |
Код |
Функция |
Описание |
0–1 |
19 |
00 |
Port 0.0 |
|
|
|
01 |
TxD0 (UART0) |
Выход передатчика UART0 |
|
|
10 |
PWM1 |
Выход 1 ШИМ |
|
|
11 |
— |
|
2–3 |
21 |
00 |
Port 0.1 |
|
|
|
01 |
RxD0 (UART0) |
Вход приемника UART0 |
|
|
10 |
PWM3 |
Выход 3 ШИМ |
|
|
11 |
EINT0 |
Вход 0 внешнего прерывания |
4–5 |
22 |
00 |
Port 0.2 |
|
|
|
01 |
SCL0 (I2C0) |
Тактовый сигнал I2C0 |
|
|
10 |
CAP0.0 (Timer 0) |
Вход 0 устр. захвата таймера 0 |
|
|
11 |
— |
|
6–7 |
26 |
00 |
Port 0.3 |
|
|
|
01 |
SDA0 (I2C0) |
Линия передачи данных I2C0 |
|
|
10 |
MAT0.0 (Timer 0) |
Выход 0 устр. сравнения таймера 0 |
|
|
11 |
EINT1 |
Вход 1 внешнего прерывания |
8–9 |
27 |
00 |
Port 0.4 |
|
|
|
01 |
SCK0 (SPI0) |
Тактовый сигнал SPI0 |
|
|
10 |
CAP0.1 (Timer 0) |
Выход 1 устр. сравнения таймера 0 |
|
|
11 |
AD0.6 |
Вход 6 АЦП 0 |
10–11 |
29 |
00 |
Port 0.5 |
|
|
|
01 |
MISO0 (SPI0) |
Вход ведущего, выход ведомого SPI0 |
|
|
10 |
MAT0.1 (Timer 0) |
Выход 1 устр. сравнения таймера 0 |
|
|
11 |
AD0.7 |
Вход 7 АЦП 0 |
34
Таблица 1.9.3 – Продолжение
Биты |
Конт. |
Код |
Функция |
Описание |
12–13 |
30 |
00 |
Port 0.6 |
|
|
|
01 |
MOSI0 (SPI0) |
Выход ведущего, вход ведомого SPI0 |
|
|
10 |
CAP0.2 (Timer 0) |
Выход 2 устр. сравнения таймера 0 |
|
|
11 |
AD1.0 |
Вход 0 АЦП 1 |
14–15 |
31 |
00 |
Port 0.7 |
|
|
|
01 |
SSEL0 (SPI0) |
Выбор режима ведущий/ведомый SPI0 |
|
|
10 |
PWM2 |
Выход 2 ШИМ |
|
|
11 |
EINT2 |
Вход 2 внешнего прерывания |
16–17 |
33 |
00 |
Port 0.8 |
|
|
|
01 |
TxD1 (UART1) |
Выход передатчика UART1 |
|
|
10 |
PWM4 |
Выход 4 ШИМ |
|
|
11 |
AD1.1 |
Вход 1 АЦП 1 |
18–19 |
34 |
00 |
Port 0.9 |
|
|
|
01 |
RxD1 (UART1) |
Вход приемника UART1 |
|
|
10 |
PWM6 |
Выход 6 ШИМ |
|
|
11 |
EINT3 |
Вход 3 внешнего прерывания |
20–21 |
35 |
00 |
Port 0.10 |
|
|
|
01 |
RTS (UART1) |
Выход запроса передачу (UART1) |
|
|
10 |
CAP1.0 (Timer 1) |
Вход 0 устр. сравнения таймера 1 |
|
|
11 |
AD1.2 |
Вход 2 АЦП 1 |
22–23 |
37 |
00 |
Port 0.11 |
|
|
|
01 |
CTS (UART1) |
Вход готовности к передаче UART1 |
|
|
10 |
CAP1.1 (Timer 1) |
Выход 1 устр. сравнения таймера 1 |
|
|
11 |
SCL1 (I2C1) |
Тактовый сигнал I2C1 |
24–25 |
38 |
00 |
Port 0.12 |
|
|
|
01 |
DSR (UART1) |
Вход готовности к обмену UART1 |
|
|
10 |
MAT1.0 (Timer 1) |
Выход 0 устр. сравнения таймера 1 |
|
|
11 |
AD1.3 |
Вход 3 АЦП 1 |
26–27 |
39 |
00 |
Port 0.13 |
|
|
|
01 |
DTR (UART1) |
Выход готовности к обмену UART1 |
|
|
10 |
MAT1.1 (Timer 1) |
Выход 1 устр. сравнения таймера 1 |
|
|
11 |
AD1.4 |
Вход 4 АЦП 1 |
28–29 |
41 |
00 |
Port 0.14 |
|
|
|
01 |
DCD (UART1) |
Вход «связь установлена» UART1 |
|
|
10 |
EINT1 |
Вход 1 внешнего прерывания |
|
|
11 |
SDA1 (I2C1) |
Линия данных (I2C1) |
30–31 |
45 |
00 |
Port 0.15 |
|
|
|
01 |
RI (UART1) |
Вход входящего вызова UART1 |
|
|
10 |
EINT2 |
Вход 2 внешнего прерывания |
|
|
11 |
AD1.5 |
Вход 5 АЦП 1 |
35
Таблица 1.9.4 – Управление функциями внешних выводов через PINSEL1
Биты |
Конт. |
Код |
Функция |
Описание |
0–1 |
46 |
00 |
Port 0.16 |
|
|
|
01 |
EINT0 |
Вход 0 внешнего прерывания |
|
|
10 |
MAT0.2 (Timer 0) |
Выход 2 устр. совпадения таймера 0 |
|
|
11 |
CAP0.2 (Timer 0) |
Вход 2 устр. захвата таймера 0 |
2–3 |
47 |
00 |
Port 0.17 |
|
|
|
01 |
CAP1.2 (Timer 1) |
Вход 2 устр. захвата таймера 1 |
|
|
10 |
SCK1 (SSP) |
Тактовый синел интерфейса SSP |
|
|
11 |
MAT1.2 (Timer 1) |
Выход 2 устр. совпадения таймера 1 |
4–5 |
53 |
00 |
Port 0.18 |
|
|
|
01 |
CAP1.3 (Timer 1) |
Вход 3 устр. захвата таймера 1 |
|
|
10 |
MISO1 (SSP) |
Вход ведущего, выход ведомого SSP |
|
|
11 |
MAT1.3 |
Выход 2 устр. совпадения таймера 3 |
6–7 |
54 |
00 |
Port 0.19 |
|
|
|
01 |
MAT1.2 |
Выход 2 устр. совпадения таймера 1 |
|
|
10 |
MOSI1 (SSP) |
Выход ведущего, вход ведомого SSP |
|
|
11 |
CAP1.2 (Timer 1) |
Вход 2 устр. захвата таймера 1 |
8–9 |
55 |
00 |
Port 0.20 |
|
|
|
01 |
MAT1.3 (Timer 1) |
Выход 2 устр. совпадения таймера 3 |
|
|
10 |
SSEL1 (SSP) |
Выбор режима ведущий/ведомый SSP |
|
|
11 |
EINT3 |
Вход 3 внешнего прерывания |
10–11 |
1 |
00 |
Port 0.21 |
|
|
|
01 |
PWM5 |
Выход 5 ШИМ0 |
|
|
10 |
AD1.6 |
Вход 6 АЦП 1 |
|
|
11 |
CAP1.3 (Timer 1) |
Вход 3 устр. захвата таймера 1 |
12–13 |
2 |
00 |
Port 0.22 |
|
|
|
01 |
AD1.7 |
Вход 7 АЦП 1 |
|
|
10 |
CAP0.0 (Timer 0) |
Вход 0 устр. захвата таймера 0 |
|
|
11 |
MAT0.0 (Timer 0) |
Выход 0 устр. совпадения таймера 0 |
14–15 |
58 |
00 |
Port 0.23 |
|
|
|
01 |
Vbus |
Вход обнаружения питания USB |
|
|
10,11 |
— |
|
16–17 |
|
— |
— |
— |
18–19 |
9 |
00 |
Port 0.25 |
|
|
|
01 |
AD0.4 |
Вход 4 АЦП 0 |
|
|
10 |
Aout (DAC) |
Выход ЦАП |
|
|
11 |
— |
|
20–23 |
|
— |
— |
— |
24–25 |
13 |
00 |
Port 0.28 |
|
|
|
01 |
AD0.1 |
Вход 1 АЦП 0 |
|
|
10 |
CAP0.2 (Timer 0) |
Вход 2 устр. захвата таймера 0 |
|
|
11 |
MAT0.2 (Timer 0) |
Выход 2 устр. совпадения таймера 0 |
36