

совпадению с порогом PWMMR0, а сбрасывать его в процедуре обработки прерываний.
Если допустить усложнение алгоритма, то можно, кроме того, измерять частоту внешнего сигнала и корректировать значения всех пороговых регистров с учетом действительной частоты. Измерение частоты рассматривается в разделе 3.17.
3.7 Формирование сигналов специальной формы с помощью ЦАП
3.7.1 Задание
Разработать программу, формирующую на выходе AOUT сигнал заданной формы (прямоугольной, синусоидальной, треугольной или пилообразной) с заданной амплитудой и частотой. Рекомендуемые параметры сигнала: амплитуда от 0,1 до 2,2 В; частота от 20 Гц до 20 кГц.
3.7.2 Основы
Цифро-аналоговый преобразователь дает дискретный по уровню сигнал. Поэтому здесь речь идет об аппроксимации аналогового сигнала дискретным по уровню и по времени.
В простейшем случае аппроксимация выполняется разбиением периода  сигнала на
сигнала на  равных интервалов длительностью
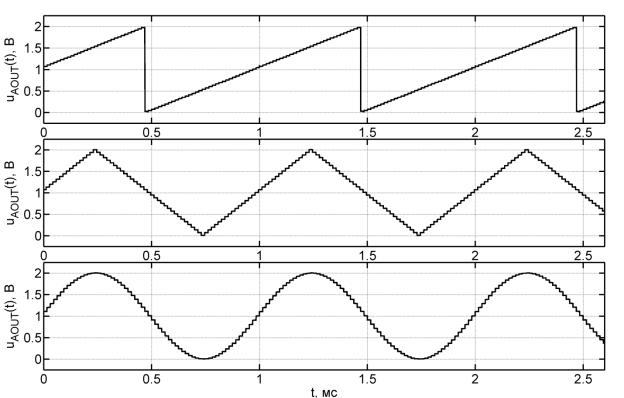
равных интервалов длительностью  . В течение каждого интервала уровень сигнала постоянный. Так образуются характерные «ступеньки» или «дискреты». На рисунке 3.7.1 приведены примеры такой аппроксимации сигналов разной формы.
. В течение каждого интервала уровень сигнала постоянный. Так образуются характерные «ступеньки» или «дискреты». На рисунке 3.7.1 приведены примеры такой аппроксимации сигналов разной формы.
Рисунок 3.7.1 – Осциллограммы сигналов, различной формы, полученные с помощью ЦАП
177

На частотах порядка 500 Гц быстродействия микроконтроллера недостаточно для вычисления дискретных отсчетов синусоидального сигнала в реальном времени. То есть для вычисления одной точки синуса требуется время, превышающее  . Поэтому таблица синусов вычисляется заранее. В зависимости от того меняются ли параметры сигнала в ходе работы программы или они постоянны, таблица рассчитывается либо на этапе разработки программы и «прошивается» в ПЗУ, либо рассчитывается по программе самим микроконтроллером и хранится в ОЗУ. Здесь будем рассматривать только второй случай. Если расчет таблицы выполняется микроконтроллером, то вычисление тригонометрической функции связано с существенными временными затратами. Можно рекомендовать рассчитать шаблон синусоидального сигнала фиксированной амплитуды и постоянно хранить в памяти в формате с плавающей точкой. Будем обозначать этот шаблон
. Поэтому таблица синусов вычисляется заранее. В зависимости от того меняются ли параметры сигнала в ходе работы программы или они постоянны, таблица рассчитывается либо на этапе разработки программы и «прошивается» в ПЗУ, либо рассчитывается по программе самим микроконтроллером и хранится в ОЗУ. Здесь будем рассматривать только второй случай. Если расчет таблицы выполняется микроконтроллером, то вычисление тригонометрической функции связано с существенными временными затратами. Можно рекомендовать рассчитать шаблон синусоидального сигнала фиксированной амплитуды и постоянно хранить в памяти в формате с плавающей точкой. Будем обозначать этот шаблон  . В таблице 3.7.1 приведены выражения и соответствующие команды Си для расчета однополярного шаблонного сигнала
. В таблице 3.7.1 приведены выражения и соответствующие команды Си для расчета однополярного шаблонного сигнала  разных форм в диапазоне
разных форм в диапазоне  .
.
Таблица 3.7.1 – Выражения для расчета шаблонных сигналов
Форма |
Математическое |
|
Реализация с помощью |
сигнала |
выражение ( |
) |
команды Си |
Меандр |
|
|
u[k] = k<N/2? 0 : 2; |
|
|
|
|
Пила |
|
|
u[k] = k*2.0/(N-1); |
|
|
|
|
Треугольник |
|
|
u[k] = k<N/2 ? |
|
|
k*4.0/N : 4-k*4.0/N; |
|
|
|
|
|
Синус |
|
|
u[k] = |
|
|
sin(6.283185307*k/N)+1; |
|
|
|
|
Всякий раз, когда необходимо изменить амплитуду, на основе шаблона  путем масштабирования, смещения и округления рассчитывается цифровой сигнал
путем масштабирования, смещения и округления рассчитывается цифровой сигнал  . Этот сигнал должен быть представлен в формате с фиксированной точкой. Он содержит отсчеты, готовые для записи в ЦАП.
. Этот сигнал должен быть представлен в формате с фиксированной точкой. Он содержит отсчеты, готовые для записи в ЦАП.
Сигнал  рассчитывается на основе
рассчитывается на основе  по общей формуле (независимо от формы):
по общей формуле (независимо от формы):
, |
(3.7.1) |
где  — амплитуда сигнала, В;
— амплитуда сигнала, В;  — опорное напряжение, В.
— опорное напряжение, В.
Дадим необходимые пояснения. Множитель 511,5 выбран исходя из числа кодовых комбинаций 10-разрадного ЦАП ( ) и при
) и при  дает
дает  . Операция округления
. Операция округления  уже известна. Умножение на 64 — это сдвиг на 6 разрядов влево (см. формат регистра DACR в разделе 1.16.1).
уже известна. Умножение на 64 — это сдвиг на 6 разрядов влево (см. формат регистра DACR в разделе 1.16.1).
Выражение (3.7.1) реализация на Си следующей командой.
v[k]=(int)floor(511.5*A/Vref*u[k]+0.5)<<6;
178
Для формирования временных интервалов  используется таймер. В процедуру обработки прерывания помещается команда обновления ЦАП вычисленным заранее значением
используется таймер. В процедуру обработки прерывания помещается команда обновления ЦАП вычисленным заранее значением  для очередной дискреты.
для очередной дискреты.
3.7.3 Алгоритм программы
Потребуется подключить директивой #include файл math.h.
На вкладке Configuration Wizard файла настройки Startup.s выбрать опцию VPBDIV Setup и VPB Clock = CPU Clock.
Впрограмме используется несколько глобальных констант и пере-
менных:
а) целочисленная константа N — число дискрет в периоде сигнала (обычно несколько десятков или сотен, но не более 500 тыс./с);
б) вещественная константа Vref, равная величине опорного напряжения (по умолчанию 2,2 В);
в) вещественные переменные A и f — амплитуда и частота сигнала, которым здесь же следует присвоить значения из задания;
г) вещественный массив отсчетов сигнала u из N элементов; д) целочисленный массив v из N элементов;
е) целочисленный счетчик  .
.
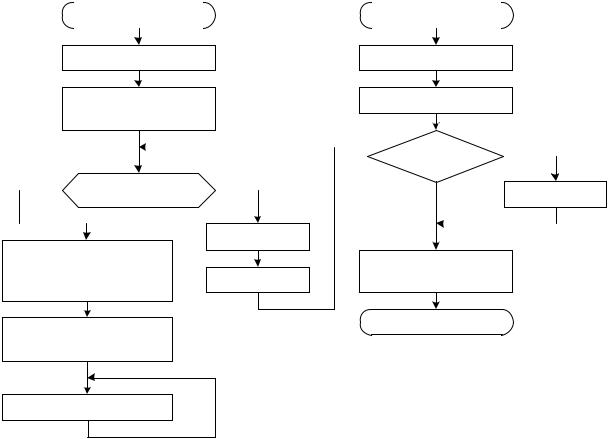
Схема основной программы и процедуры обработки прерывания показаны на рисунке 3.7.2
Восновной программе потребуется локальная переменная — счетчик k.
|
|
|
Основная программа |
|
|
|
Процедура обработки прерывания |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Начало |
|
|
|
|
|
Начало |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|||
|
|
|
|
K = 0 |
|
|
|
|
|
Запись в ЦАП v[K] |
|
|
|
||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
Настройка режима |
|
|
|
|
|
K = K + 1 |
|
|
|
|||
|
|
|
|
линии P0.25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
Да |
||
|
|
|
|
|
|
|
|
|
|
||||||
|
Нет |
3 |
|
|
Да |
|
|
K = N |
|
|
|
||||
|
|
|
|
|
4 |
|
|||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
k = 0; k < N; k++ |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Нет |
|
K = 0 |
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6 |
|
|
|
|
|
Расчет u[k] |
5 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Настройка таймера: |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Инициализация |
|
|
|
||||||
|
задание порога, вкл. |
5 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
Расчет v[k] |
|
|
системы прерываний |
|
|
|
|||||||
сброс и запрос прерывания |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
7 |
Настройка системы |
Конец |
|
||
|
|
|
|
прерываний |
|
8
Пустая команда
Рисунок 3.7.2 – Алгоритм программы функционального генератора
179
1.Присваивание нулевого начального значения счетчику K реализуется в разделе объявления.
2.Перевести линию P0.25 в режим аналогового выхода (PINSEL1).
3–5. В цикле заполнить массивы по одной из формул таблицы 3.7.1 и формуле (3.7.1)
6. Настроить таймер:
а) задать пороговое значение, обеспечивающее необходимую длительность дискреты
 ;
;
в соответствии с выражением 1.13.3 пороговое значение
 ;
;
б) включить сброс и прерывание по совпадению (T0MCR); в) включить таймер (T0TCR).
7. Настроить систему прерываний через регистры VICVectAddr0, VICVectCntl0 и VICIntEnable (раздел 1.11.5).
Процедура обработки прерывания создается до основной программы по шаблону, предложенному в разделе 1.11.7.
Прокомментируем алгоритм процедуры обработки прерываний.
1.Записать значение текущей дискреты в ЦАП (регистр DACR).
2.Увечить глобальный счетчик K на единицу.
3–4. Обнулить счетчик K, Если он равен N.
5. Выполнить инициализацию системы прерываний, сбросив флаг совпадения (T0IR) и обнулив VICVectAddr.
3.7.4 Повышение точности генерирования частоты
Недостаток рассмотренного алгоритма в том, что равенство длительностей всех  интервалов увеличивает погрешность частоты. Действительно, очевидно, что пределы абсолютной погрешности длительности дискреты
интервалов увеличивает погрешность частоты. Действительно, очевидно, что пределы абсолютной погрешности длительности дискреты
 .
.
Причем погрешности каждой дискреты одинаковы и имеют один и тот же знак. Тогда предельная абсолютная погрешность периода пропорциональная числу дискрет  .
.
 .
.
Избавиться от влияния  можно, сделав разными
можно, сделав разными  для каждой дискреты, так чтобы погрешность периода не превышала половины такта. Реализация такого подхода потребует внести следующие изменения в алгоритм:
для каждой дискреты, так чтобы погрешность периода не превышала половины такта. Реализация такого подхода потребует внести следующие изменения в алгоритм:
1.Ввести глобальный целочисленный массив T из N элементов, который будет хранить пороговые значения таймера для каждой дискреты.
2.Цикл (блоки 3–5) дополнить командой расчета длительностей дискрет по формуле
T[k]=floor(60E6/f/N*(k+1)+0.5)-1;
3. Присвоить пороговому значению (блок 6) величину T[0].
180