


3.6 Формирование импульсного управляющего сигнала с помощью модуля ШИМ
3.6.1 Задание
Разработать программу, генерирующую три последовательности прямоугольных сигналов, смещенных по фазе на 120º. Параметры сигналов: частота  ; скважность
; скважность  (коэффициент заполнения
(коэффициент заполнения  задаются преподавателем). Пример осциллограммы сигнала показан на рисунке 3.6.1
задаются преподавателем). Пример осциллограммы сигнала показан на рисунке 3.6.1
Рисунок 3.6.1 – Осциллограммы сигнала на выходах ШИМ
3.6.2 Общие сведения
Вимпульсных системах управление объектом возможно путем регулирования коэффициента заполнения (скважности) импульсов, начальной фазы или частоты. В этой связи различают системы с широтно-импульсной модуляцией (ШИМ), импульсно-фазового управления (СИФУ) или частотного управления.
Система может быть как однофазной, так и трехфазной. Трехфазная система состоит из трех каналов. Параметры импульсов во всех каналах обычно одинаковы, но начальная фаза отличается на 120 градусов.
Ниже в таблицах 3.6.1–3.6.3 приводятся выражения для настройки ШИМ в трехфазных системах тех типов. В случае однофазной системы нужно повторить настройки для каналов 0 и 2 (а для СИФУ— 0–2).
Втрехфазных системах управляющий импульсный сигнал формируется на выходах PWM2, 4, 6; в однофазных — PWM2. Считается, что предварительный делитель частоты ШИМ не используется.
Частотное управление дает коэффициент заполнения  . Если требуется получить другой коэффициент управления, можно использовать настройки для ШИМ (таблица 3.6.1).
. Если требуется получить другой коэффициент управления, можно использовать настройки для ШИМ (таблица 3.6.1).
174
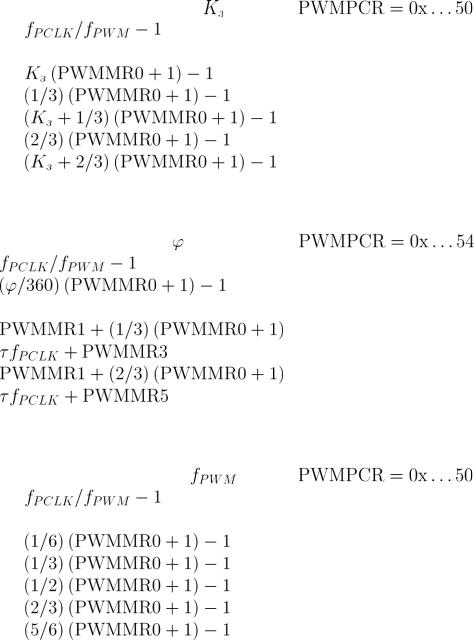
Таблица 3.6.1 – Настройки для трехфазной системы ШИМ
Пороговые |
|
Значения пороговых регистров |
|
PWMSELx |
регистры |
|
(переменная — ) |
|
|
PWMMR0 |
|
|
|
— |
PWMMR1 |
|
0 (не имеет значения) |
|
— |
PWMMR2 |
|
|
|
0 |
PWMMR3 |
|
|
|
0 |
PWMMR4 |
|
|
|
1 |
PWMMR5 |
|
|
|
0 |
PWMMR6 |
|
|
|
1 |
Таблица 3.6.2 – Настройки для трехфазной системы СИФУ |
|
|||
|
|
|
|
|
Пороговые |
|
Значения пороговых регистров |
|
PWMSELx |
регистры |
|
(переменная — , град.) |
|
|
PWMMR0 |
|
|
|
— |
PWMMR1 |
|
|
|
— |
PWMMR2 |
¿ fP CLK + PWMMR1 |
|
1 |
|
PWMMR3 |
|
|
|
0 |
PWMMR4 |
|
|
|
1 |
PWMMR5 |
|
|
|
0 |
PWMMR6 |
|
|
|
1 |
Таблица 3.6.3 – Настройки для трехфазной системы частотного управления
Пороговые |
Значения пороговых регистров |
PWMSELx |
|
регистры |
(переменная — |
) |
|
PWMMR0 |
|
|
— |
PWMMR1 |
0 (не имеет значения) |
|
— |
PWMMR2 |
|
|
0 |
PWMMR3 |
|
|
0 |
PWMMR4 |
|
|
1 |
PWMMR5 |
|
|
0 |
PWMMR6 |
|
|
1 |
3.6.3 Алгоритм программы
Широтно-импульсных модулятор является одним из самых простых узлов микроконтроллера. Для получения сигнала с неизменными параметрами требуется однократно выполнить настройку модуля ШИМ. Алгоритм настройки приведен на рисунке 3.6.2.
1.Перевести портовые линии P0.7–P0.9 в режим PWM2, 4, 6 соответственно (регистр PINSEL0).
2.Задать частоту ШИМ  Гц (регистр PWMMR0). Воспользоваться первой формулой в таблице 3.6.1.
Гц (регистр PWMMR0). Воспользоваться первой формулой в таблице 3.6.1.
3.Рассчитать и присвоить регистрам PWMMR1–6 значения, обеспечивающие необходимую скважность (коэффициент заполнения и начальные фазы). Начальная фаза канала PWM2 задается регистром PWMMR1, его ко-
175

эффициент заполнения — разностью PWMMR2 и PWMMR1. По аналогии следующая пара регистров PWMMR3–PWMMR4 определяет параметры сигнала PWM4, а пара PWMMR5–PWMMR6 — сигнала PWM6. Принять начальную фазу второго канала нулевой, остальные в соответствии с заданием смещены на 120º. Все необходимые формулы есть в таблице 3.6.1.
Основная программа |
4 |
|
|
|
|
||
Начало |
|
Настройка схемы |
|
|
совпадения ШИМ |
||
|
|
||
1 |
5 |
|
|
Настройка режимов |
Включить счетчик |
||
портовых линий |
|
||
ШИМ в синхронном |
|||
P0.7–P0.9 |
|||
|
режиме |
||
|
|
||
2 |
6 |
|
|
Задание частоты ШИМ |
|
||
Включить каналы с |
|||
|
|||
3 |
|
управлением фазой |
|
|
|
||
Задание коэфф. |
|
|
|
заполнения |
7 |
|
|
и начальные фазы |
Пустая команда |
||
|
|||
|
|
||
Рисунок 3.6.2 – Алгоритм настройки ШИМ
4.Через регистр PWMMCR разрешить сброс счетчика ШИМ при совпадении с пороговым значением PWMMR0.
5.Включить счетчик ШИМ, включить защелки пороговых регистров для синхронного режима (регистр PWMTCR).
6.Через регистр PWMPCR включить выходы каналов 2, 4, 6 и управление начальной фазой для каналов 4 и 6 (см. правую колонку таблицы 3.6.1).
7.Зациклить программу.
3.6.4 Отладка
Если полученный сигнал не соответствует осциллограммам на рисунке 3.6.1, тщательно проверить настройку ШИМ. Практически верные настройки ШИМ показаны на рисунке 2.4.8.
3.6.5 Синхронизация внешним сигналом
В системах импульсно-фазового управления обычно необходима синхронизация внешним сигналом, соответствующим напряжению питающей сети 220/380 В, 50 Гц. Такой сигнал формируется с помощью устройства синхронизации с трансформаторной или оптической развязкой.
С точки зрения программирования для синхронизации необходимо обеспечить сброс счетчика ШИМ и начало нового цикла счета по фронту внешнего синхросигнала. В этом случае частота станет равна частоте сети, а фаза начнет отсчитываться от начала синхроимпульса (обычно совпадает с началом периода сети).
Предлагается реализация с помощью прерывания по внешнему сигналу (раздел 1.12). Нужно запретить автоматический сброс счетчика ШИМ по
176