

- •ПРЕДИСЛОВИЕ
- •Глава 1. НАЧАЛО РАБОТЫ В MATLAB
- •1.1. РАБОЧЕЕ ОКНО
- •1.3. ВЫЧИСЛЕНИЯ В КОМАНДНОМ ОКНЕ
- •1.5. ПЕРЕМЕННАЯ
- •1.6. ВСТРОЕННЫЕ МАТЕМАТИЧЕСКИЕ ФУНКЦИИ
- •1.7. ОЧИЩЕНИЕ КОМАНДНОГО ОКНА И РАБОЧЕГО ПРОСТРАНСТВА
- •1.8. КОМПЛЕКСНЫЕ ЧИСЛА
- •1.10. M-ФАЙЛЫ
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •Глава 2. МАССИВЫ
- •2.1. ОПЕРАЦИИ НАД МАТРИЦАМИ В ЛИНЕЙНОЙ АЛГЕБРЕ
- •2.2. СПОСОБЫ ЗАДАНИЯ ВЕКТОРОВ В MATLAB
- •2.3. ОПЕРАЦИИ НАД ВЕКТОРАМИ В MATLAB
- •2.4. СПОСОБЫ ЗАДАНИЯ МАТРИЦ В MATLAB
- •2.5. ОПЕРАЦИИ НАД МАТРИЦАМИ В MATLAB
- •2.6. ИЗВЛЕЧЕНИЕ И ВСТАВКА ЧАСТЕЙ МАТРИЦЫ В MATLAB
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •Глава 3. ЛИНЕЙНАЯ АЛГЕБРА
- •3.1. ОПРЕДЕЛИТЕЛЬ КВАДРАТНОЙ МАТРИЦЫ
- •3.2. ОБРАТНАЯ МАТРИЦА
- •3.3. РАНГ МАТРИЦЫ
- •3.4. СИСТЕМЫ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •Глава 4. ГРАФИКА В MATLAB
- •4.1. ДВУМЕРНАЯ ГРАФИКА
- •4.4. ПОСТРОЕНИЕ ПОВЕРХНОСТЕЙ И КРИВЫХ В ПРОСТРАНСТВЕ
- •4.5. ОФОРМЛЕНИЕ ГРАФИКОВ
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •Глава 5. ВЕКТОРНАЯ АЛГЕБРА
- •5.1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
- •5.2. ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ, ОСНОВНЫЕ СВОЙСТВА
- •5.3. БАЗИС И КООРДИНАТЫ ВЕКТОРА. ОРИЕНТАЦИЯ БАЗИСА
- •5.4. ДЛИНА ВЕКТОРА. НАПРАВЛЯЮЩИЕ КОСИНУСЫ ВЕКТОРА
- •5.5. ДЕЙСТВИЯ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕ
- •5.6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ, ЕГО СВОЙСТВА
- •5.7. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ, ЕГО СВОЙСТВА
- •5.8. СМЕШАННОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ, ЕГО СВОЙСТВА
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •Глава 6. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ
- •6.1. УРАВНЕНИЯ ПРЯМОЙ НА ПЛОСКОСТИ
- •6.2. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ДВУХ ПРЯМЫХ НА ПЛОСКОСТИ
- •6.3. РАССТОЯНИЕ ОТ ТОЧКИ ДО ПРЯМОЙ
- •6.4. КРИВЫЕ ВТОРОГО ПОРЯДКА
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •Глава 7. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ
- •7.1. УРАВНЕНИЯ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
- •7.2. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ДВУХ ПЛОСКОСТЕЙ
- •7.3. РАССТОЯНИЕ ОТ ТОЧКИ ДО ПЛОСКОСТИ
- •7.4. ПРЯМАЯ В ПРОСТРАНСТВЕ
- •7.5. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ДВУХ ПРЯМЫХ В ПРОСТРАНСТВЕ
- •7.6. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПРЯМОЙ И ПЛОСКОСТИ В ПРОСТРАНСТВЕ
- •7.7. РАССТОЯНИЕ ОТ ТОЧКИ ДО ПРЯМОЙ В ПРОСТРАНСТВЕ
- •7.8. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
- •КОНТРОЛЬНЫЕ ВОПРОСЫ
- •КОНТРОЛЬНЫЕ ЗАДАНИЯ
- •БИБЛИОГРАФИЧЕСКИЙ СПИСОК
а |
|
|
|
б |
|
|
|
, полученное |
|
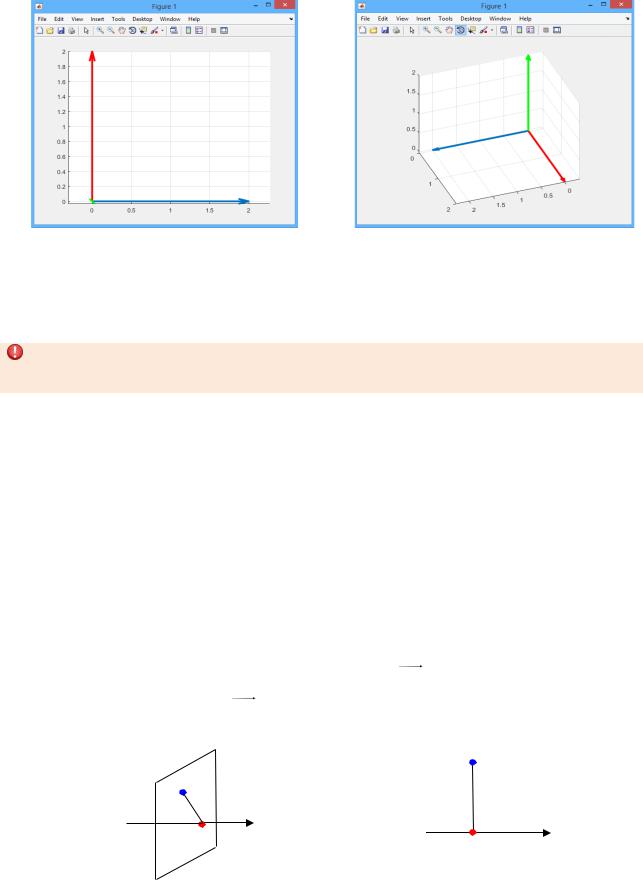
Рис. 5.9. Изображение векторов 1 |
2 |
, 1 2 |
, 1 2 |
|
с использованием команды quiver3: а – плоское; б – объемное
В дальнейшем для построения векторов будем использовать функцию quiver и quiver3.
5.2. ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ, ОСНОВНЫЕ СВОЙСТВА
Пусть в пространстве заданы точка М и ось l (направленная прямая). Проекцией точки М на ось l называется основание М1 перпендикуляра,
опущенного из точки М на ось l .
Точка М1 есть точка пересечения оси l с плоскостью, проходящей через точку М перпендикулярно оси l (рис. 5.10, а).
Если точка М и ось l заданы на плоскости, точка М1 есть точка пересечения оси l с прямой, проходящей через точку М перпендикулярно оси l (рис. 5.10,
б).
Пусть в пространстве заданы ось l и вектор AB и А1, В1 – проекции на ось l
начала A и конца В вектора AB соответственно. |
|
|
|
|
|
|
М |
М |
|
|
|
М1 |
l |
М1 |
l |
|
|||
|
|
||
а |
|
|
б |
Рис. 5.10. М1 – проекция точки М на ось l : а – в пространстве; б – на плоскости
112

Проекцией вектора AB на ось l называется число, равное длине вектора
A1B1 , взятое со знаком «+», если направление вектора A1B1 совпадает с нап-
равлением оси l (рис. 5.11, а), и со знаком «–», если направление вектора A1B1
противоположно направлению оси l (рис. 5.11, б). Обозначение: прl AB .
B
A
A1 |
B1 |
l |
|
а
B 
 A
A
B1 |
A1 |
l |
б
Рис. 5.11. А1, В1 – проекции на ось l начала A и конца В вектора AB
впространстве. Направление вектора A1B1 :
а– совпадает с направлением оси l; б – противоположно направлению оси l
Если ось l и вектор AB заданы на плоскости, то возможны два случая:
направление вектора A1B1 совпадает с направлением оси l (5.12, а); направле-
ние вектора A1B1 противоположно направлению оси l (5.12, б).
|
|
|
B |
|
B |
|
|||
|
|
|
|
|
|
|
|
||
|
A |
|
|
|
|
|
|
A |
|
|
|
|
|
|
l |
|
|
|
l |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
A1 |
|
|
A1 |
B1 |
|
B1 |
|||||
|
|
а |
|
|
|
|
|
|
б |
|
Рис. 5.12. А1, В1 – проекции на ось l начала A и конца В вектора AB |
||||||||
|
|
на плоскости. Направление вектора A1B1 |
: |
||||||
|
а – совпадает с направлением оси l; б – противоположно направлению оси l |
||||||||
|
Если направление вектора A1B1 |
совпадает с направлением оси l (рис. |
|||||||
|
|
|
|
|
|
|
|||
5.11, а и 5.12, а), то прl |
AB |
A1B1 |
; если направление вектора A1B1 противопо- |
||||||
ложно направлению оси l (рис. 5.11, б и 5.12, б), то прl AB A1B1 ; если точ-
ки A1 , B1 совпадают ( AB 0 или AB l ), то прl AB = 0.
113

Пусть в пространстве заданы вектор a , ось l и угол1 (φ ) между вектором a
и осью l. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
На рис. 5.13 показаны случаи, |
когда вектор a |
и ось l заданы на плоскости: |
||||||||||||||||||||||||||||||
0 |
|
и |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
φ |
||||||
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
a1 |
|
l |
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
l |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
||
|
|
|
|
|
Рис. 5.13. Вектор a и ось l заданы на плоскости, |
|||||||||||||||||||||||||||
|
|
|
φ – угол между вектором a и осью l: а – 0 ; б – |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
Теорема 5.1. Проекция вектора a на ось l |
равна произведению модуля |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
вектора a на косинус угла φ между вектором a и осью l, т. е. |
прl a |
a |
cos . |
|||||||||||||||||||||||||||||
Доказательство. Рассмотрим три случая: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
1) |
0 |
. Тогда пр a |
|
a |
|
|
|
|
a |
|
cos . |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
2 |
l |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) |
. Тогда пр a |
|
a |
|
|
|
a |
|
cos |
|
a |
|
cos . |
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
2 |
|
|
|
l |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) 2 . Тогда прl a 0 a cos . Теорема доказана.
Пусть заданы векторы a , b и ось l. Линейные операции над проекциями вектора на ось обладают следующими свойствами:
1)прl a b прl a прl b ,
2)прl a прl a , где R .
Справедливы следующие утверждения:
Проекция вектора на ось положительна (отрицательна), если вектор образует с осью острый (тупой) угол, и равна нулю, если этот угол – прямой.
1 Угол, на который надо повернуть против часовой стрелки ось l, чтобы ее направление совпало с направлением данного вектора.
114

Проекции равных векторов на одну и ту же ось равны.
Проекция линейной комбинации векторов a , b на ось l равна линейной
комбинации проекций векторов a , b на ось l: |
|
прl a b прl a прl b , |
, R . |
5.3. БАЗИС И КООРДИНАТЫ ВЕКТОРА. ОРИЕНТАЦИЯ БАЗИСА
Пусть даны прямая L и ненулевой вектор a , лежащий на ней (рис. 5.14).
L
a
Рис. 5.14. Ненулевой вектор a лежит на прямой L
Лемма (о коллинеарных векторах). Если векторы a и b коллинеарны, a 0 , то существует и притом только одно число R , удовлетворяющее равенству b a .
Таким образом, любой вектор b , лежащий на прямой l, может быть представлен в виде b a , R и такое представление единственно. Это означает, что любой вектор на прямой L с использованием операции умножения вектора на число может быть однозначно выражен через вектор a .
Базисом на прямой L называется любой ненулевой вектор a , лежащий на этой прямой.
Пусть b a , тогда число R будем называть координатой вектора b в базисе a и обозначать b ( ) или b .
Таким образом, базисом на прямой является любой ненулевой вектор. Рассмотрим более общий случай плоскости или пространства и попытаем-
ся ответить на следующий вопрос: сколько и каких векторов нужно задать, чтобы через них с помощью операции сложения векторов и умножения вектора на число можно было бы однозначно выразить любой другой вектор? Ответ на этот вопрос дают следующие две теоремы, доказательство которых можно найти в стандартных школьных учебниках.
Теорема 5.2. Любой вектор, лежащий на плоскости, можно разложить по двум данным неколлинеарным векторам, лежащим в этой же плоскости, притом единственным образом.
115

Теорема 5.3. Любой вектор в пространстве можно разложить по трем некомпланарным векторам и притом единственным образом.
Базисом на плоскости называется любая упорядоченная пара неколлинеарных векторов.
Базисом в пространстве называется любая упорядоченная тройка некомпланарных векторов.
Что означает упорядоченная?
Рассмотрим некоторую плоскость π и три вектора a , b , c π . Пусть a , b – неколлинеарны. Тогда можно записать:
c a b , |
(5.1) |
где , R .
Будем считать вектор a – первым, b – вторым. Тогда запись α, β в бази-
се a , b однозначно определяет вектор c .
Числа , называются координатами вектора c в базисе a , b .
Обозначение: c , или c , . В дальнейшем мы не будем оговаривать тот или иной способ обозначения.
Если будем считать вектор b – первым, a – вторым, тот же самый вектор c следует записать в виде c = β, α .
Таким образом, координаты вектора c в заданном базисе зависят от того, какой вектор считать первым, а какой вторым, т. е. для заданной пары неколлинеарных векторов a и b существуют два базиса: a , b и b , a на плоскости.
В пространстве принципиально ничего не меняется, только вместо (5.1)
имеем следующее разложение: |
|
d a b c , |
(5.2) |
где a , b , c – некомпланарные векторы, α, β, γ R . |
|
Числа α, β, γ называются координатами вектора d в базисе a , b , c . |
|
Обозначение: d , , .
Упражнение. Сколько базисов существует для трех заданных некомпланарных векторов в пространстве?
Базис называется ортогональным, если все базисные векторы попарно перпендикулярны.
Будем считать, что нулевой вектор ортогонален любому вектору.
116

Ортогональный базис, у которого длины всех базисных векторов равны единице, называется ортонормированным.
На плоскости ортонормированным базисом является пара векторов i, j ,
i j , |
i |
1, |
j |
1. |
|
|
|
|
|
В пространстве ортонормированным базисом является тройка векторов
i, j, k , i j , i k , |
j k , |
i |
1, |
j |
1, |
k |
1. |
|
|
|
|
|
|
|
|
Введем понятие ориентации тройки некомпланарных векторов.
Пусть даны два ортонормированных базиса e1, e2 ,e3 и f1, f2 , f3 . Можно ли совместить эти базисы при помощи перемещения в пространстве?
Понятно, что векторы e1 и f1 можно всегда совместить. Тогда совпадут плоскости векторов e1, e2 и f1, f2 . Поворачивая эту плоскость вокруг направ-
ления e1 , всегда можно совместить векторы e2 и f2 . Так как базисы ортонор-
мированные, следовательно, |
e3 будет коллинеарен f3 . Возможны два случая: |
|
e3 f3 |
и e3 f3 . |
|
В |
первом случае при |
перемещении в пространстве базисы e1,e2 ,e3 |
и f1, f2 , f3 совмещаются, во втором случае – нет.
Предположим, что эти базисы не совмещаются, т. е. e3 f3 и рассмотрим еще один ортонормированный базис g1, g2 , g3 . Повторяя описанную выше процедуру совмещения, получим, что этот базис совпадает либо с базисом e1, e2 , e3 , либо с базисом f1, f2, f3 . Таким образом, множество всех ортонормированных базисов распадается на два класса. Базисы, принадлежащие одному классу, совмещаются друг с другом перемещением, а базисы, принадлежащие различным классам, не совмещаются. Эти классы называются классами ориентации или просто ориентацией базисов.
Вывод: Базисов много, ориентаций – две.
Упорядоченная тройка некомпланарных векторов в пространстве называется правоориентированной (или правой), если из конца третьего вектора кратчайший поворот от первого ко второму виден против часовой стрелки (рис. 5.15, а). В противном случае, тройка называется левоориентированной
(или левой) (рис. 5.15, б).
Пространство, в котором выбран базис, – ориентированное.
Пусть в пространстве задана декартова прямоугольная система координат (ДПСК) Охyz с ортонормированным базисом i, j, k . Пусть a – произвольный
117

вектор пространства. Совместим его начало с началом координат: a OM .
– проекции точки М на координатные оси Ox, Oy, Oz соответ-
ственно, α, β, γ – углы между вектором a и координатными осями Ox, Oy, Oz соответственно (рис. 5.16).
e3 |
|
|
e3 |
|
|
|
e2 |
|
e1 |
|
|
|
||
|
|
|
|
|
|
e1 |
|
|
e2 |
|
а |
|
|
б |
Рис. 5.15. Упорядоченная тройка некомпланарных векторов: а – правая; б – левая
z M3
|
γ |
M |
|
|
|
k |
a |
β |
O |
|
|
|
|
|
i |
j |
M2 y |
α |
||
M1 |
|
|
x |
|
P |
Рис. 5.16. α, β, γ – углы между вектором a OM и координатными осями Ox, Oy, Oz соответственно, M1 , M 2 , M3 – проекции точки М
на координатные оси Ox, Oy, Oz соответственно
Тогда имеем: прOx a OM1 , прOy a OM 2 , прOz a OM 3 .
Из прямоугольного |
|
параллелепипеда получим a OM1 |
|
M1P PM , |
||||||||||||
откуда a OM1 OM 2 |
|
OM3 . |
|
|
||||||||||||
Так как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
OM1 |
|
OM1 |
|
i , OM 2 |
OM 2 |
j , OM 3 |
|
OM 3 |
|
k , |
||||||
|
|
|
|
|||||||||||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
a |
OM1 |
i |
OM 2 |
j |
OM3 |
k . |
(5.3) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
118