

892
.pdfНо на систему наложено пять связей, уравнения которых имеют вид:
х0=0; у0=0; х12 у12 l12 ; x2 x1 2 y2 y1 2 l22 ; у2=0.
Независимой остается лишь одна из шести координат. За обобщенную координату можно принять любую из трех координат х1; у1; х2, у2, но удобнее взять угол поворота кривошипа θ, так как через него легко выразить все остальные координаты.
В современной практике моделирования [17] в качестве обобщенных координат рекомендуются величины, производные по времени, от которых представляют фазовые координаты типа потока (скорости, расходы, температуры, токи).
Производные от обобщенных координат qi называют обобщенными скоростями qi . В механических системах обобщенными могут быть ли-
нейные или угловые скорости.
Одновременное задание всех координат и скоростей полностью определяет состояние системы и позволяет в принципе ее дальнейшее движение. С математической точки зрения это значит, что заданием всех координат qi, и скоростей qi в некоторый момент времени однозначно опреде-
ляется также и значение ускорений qi в этот момент.
Обобщенные силы. Каждой обобщенной координате qi соответствует своя обобщенная сила Qi.
Работу всех обобщенных сил на возможных перемещениях системы (виртуальную работу) можно вычислить по формуле:
n |
|
А Ai Qi qi , |
(5.21) |
i 1
где δqi – вариация i-той обобщенной координаты;
δАi – работа i-й обобщенной силы на возможном перемещении.
Из этой формулы следует, что обобщенные силы представляют собой коэффициенты при вариациях обобщенных координат в выражении для виртуальной работы.
Так как вариации обобщенных координат δqi независимы, то вычисляя работу всех приложенных к системе сил на одном из возможных перемещений δqi, а все остальные вариации в формуле (5.21) полагая равными нулю, легко определить каждую обобщенную силу Qi в отдельности.
Из этой же формулы получают размерность обобщенной силы [Q]=[A]/[q]. Так, если обобщенная координата имеет размерность длины, то обобщенная сила имеет размерность силы (Н), если же обобщенной координатой является угол, то обобщенная сила имеет размерность момента
(Н м).
В гидравлических, тепловых или электрических системах размерность обобщенных сил может быть иной, связанной с физической размерностью гидравлических или тепловых потоков, электромагнитных моментов и др. Обобщенные силы часто подразделяют на произвольные (внешние,
активные), потенциальные (консервативные) и диссипативные (рассеива-
ющие). Такая классификация обычно связана с выделением из моделируе-
101
мого технического объекта типовых элементов. К ним относят завершенные в конструктивном отношении узлы, предназначенные для выполнения определенных функций и обладающие своеобразными динамическими свойствами. Примерами таких элементов являются инерционные (обычно сосредоточенные массы, обладающие свойством накапливать кинетическую энергию); упругие (способные накапливать потенциальную энергию); диссипативные (отображающие свойства диссипации (рассеяния) энергии конструктивными элементами технического объекта, обусловленные силами внутреннего трения); фрикционные (отражающие свойства фрикционных механизмов); трансформаторные (отображающие безинерционные преобразования параметров потока энергии) и др.
В настоящее время создают библиотеку математических моделей функционально законченных элементов, позволяющую построить общую модель технического объекта с учетом его структурного состава [17].
Как уже было отмечено ранее, блестящим завершением поиска наиболее удачного описания динамики механических систем с помощью дифференциальных уравнений явились труды Жозефа Луи Лагранжа (17361813 гг.), и особенно его «Аналитическая механика», опубликованная в
1788 г.
Особое значение при моделировании сложных технических систем приобрели уравнения Ж. Лагранжа второго рода. Их в настоящее время используют при построении моделей не только механических систем, но и объектов любой физической природы, если они рассматриваются как системы с сосредоточенными параметрами. При этом никаких ограничений на структуру и физические свойства объекта не накладываются.
Уравнения Ж. Лагранжа второго рода для системы с голономными связями имеют вид:
d |
T |
|
|
T |
Qi , i = 1…n, |
|
|
|
|
|
|
|
(5.22) |
||
|
q |
qi |
|||||
dt |
|
|
|
|
|||
где Т - кинетическая энергия системы; qi – обобщенные координаты;
qi - обобщенная скорость;
Qi – обобщенная сила;
n – число степеней свободы системы.
Вывод этого уравнения не столь уже сложен, но выходит за рамки данного учебного пособия, тем более, что он приводится практически во всех учебниках и учебных пособиях по теоретической механике [27], [29], [30].
Если среди обобщенных сил имеют место потенциальные и диссипативные, то уравнение (5.22) может принять форму:
d |
|
T |
|
|
T |
|
|
|
|
||||
|
q |
q |
||||
dt |
|
|
||||
|
|
i |
|
i |
||
П |
Ф Q |
(5.23) |
qi |
i |
|
qi |
|
где П – потенциальная энергия системы; Ф – диссипативная функция Рэлея.
102
Обобщенная сила Qi, фигурирующая в этом уравнении, определяется с учетом работы источников всех внешних воздействий, а также некоторых внутренних источников, которые не могут быть отнесены к упругим и диссипативным элементам.
Очень часто уравнения Ж. Лагранжа используют при изучении колебаний машин и механизмов. Если при этом исследователя интересуют параметры свободных колебаний (т.е. Qi = 0), то уравнение принимают в виде (5.22), без учета диссипативной функции, а для изучения затухающих колебаний необходимо полное уравнение (5.23).
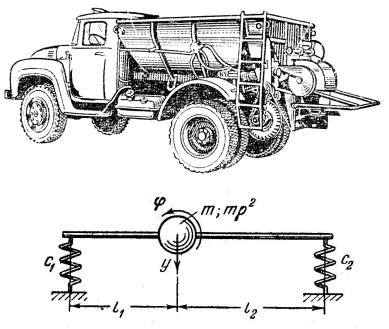
В качестве примера можно рассмотреть свободные колебания автомобильного разбрасывателя удобрений (рис. 5.22).
Обычно принимается, что переднюю и заднюю подвески можно представить в виде двух пружин; при этом раму и кузов машины вместе с другими, жестко связанными с ними телами схематически представляют в виде тела, обладающего конечным моментом инерции.
Если обозначить жесткости пружин как С1 и С2, через m и ρ – массу и радиус инерции тела, а в качестве обобщенных координат принять вертикальное перемещение центра тяжести у и угол поворота связанной с телом жесткой балки θ, тогда кинетическую и потенциальную энергии можно записать в виде:
|
|
m |
y |
2 |
|
2 |
2 |
|
|
|
Т |
|
|
|
|
|
|||
|
|
|
|
||||||
|
|
2 |
|
|
|
|
|
|
|
|
С1 y l1 2 |
|
C2 y l2 2 |
. |
|||||
П |
|
|
|||||||
2 |
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|||
Рис. 5.22. Схема к исследованию свободных колебаний машины для внесения удобрений
103
Производные, необходимые для подстановки в уравнение Ж.Лагранжа,
d |
T |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|||
|
|
q |
|
|
qi |
dt |
|
|
|||
П 0qi
окажутся следующими: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
T |
|
2 |
m |
|
y my ; |
T |
|
2 |
m |
2 m 2 ; |
|
|
|
|
||||||||||||||||||||
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
d |
|
|
T |
|
|
d |
my |
my ; |
|
|
|
d |
T |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m 2 ; |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
П |
|
|
c |
|
y2 2l y l 2 |
|
c y2 2l y l 2 |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
2 |
|
2 |
|
|
||||||||||
y |
y |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
2с1 y 2l1 c1 0 |
|
2c2 y 2l2 c2 |
0 |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
c1 y l1c1 c2 y l2c2 c1 c2 y |
c1l1 c2l2 . |
|
|
|
|
||||||||||||||||||||||||||||||||
П c l y c l 2 |
c l |
2 |
y c l 2 |
c l |
2 c l 2 |
c l c l |
2 |
y . |
||||||||||||||||||||||||||||||
|
1 1 |
|
|
1 1 |
|
|
|
|
2 |
|
|
|
2 2 |
|
|
|
|
|
|
|
1 1 |
|
2 1 |
|
1 1 |
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После подстановки производных в уравнение получится: |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
C2 |
|
y |
|
|
|
C2l2 |
|
0 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
my C1 |
|
|
|
|
C1l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
m 2 C1l12 C2l22 C1l1 C2l2 y 0 |
|
|
|
|
||||||||||||||||||||||||||||||
Если предположить, что параметры рассматриваемой системы удовлетворяют двум простым (и реально осуществимым) соотношениям:
С |
l |
= C l , ρ2 |
= l |
1 |
l |
, |
1 |
1 |
2 2 |
|
2 |
|
тогда систему дифференциальных уравнений можно упростить:
|
|
C2 |
|
y |
|
0 |
|
||||
my C1 |
|
|
|
|
|
||||||
m C C |
|
|
0 |
. |
|||||||
2 |
|
||||||||||
1 |
|
|
|
|
|
|
|
||||
Положив (С1+С2) / m = k2, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
y k |
y 0 |
|
|
||||||||
|
|
|
|||||||||
k 2 |
|
, |
|
||||||||
0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
т.е. линейные однородные уравнения второго порядка с постоянными коэффициентами.
Вид общего решения линейных дифференциальных уравнений, как известно, зависит от значений корней характеристических уравнений, которые в данном случае одинаковы:
2 k 2 0 .
Поскольку корни этого уравнения – чисто мнимые числа: 1 k i ,2 k i , то общим решением дифференциального уравнения для любой
переменной, допустим х, будет
x C1 coskt C2 sin kt ,
104

где в данном случае прописными буквами С1 и С2 обозначены постоянные интегрирования.
Для большего удобства анализа этого решения вводят обычно новые постоянные интегрирования А и α, предположив, что
C1 A sin , C2 A cos .
Это можно сделать, так как из этих соотношений постоянные А и α определяются через С1 и С2 с помощью формул:
А |
|
; tg |
C1 |
. |
|
|||
С2 С2 |
|
|||||||
|
|
|||||||
1 |
2 |
|
|
|
C2 |
|
||
|
|
|
|
|
|
|
||
Тогда |
|
|
|
|
|
|
|
|
x Acos sin kt Asin coskt , или x Asin(kt ) . |
|
|||||||
Используя этот прием для каждого уравнения системы, получаем: |
||||||||
y A sin kt |
|
|
|
|||||
1 |
1 |
|
. |
(5.24) |
||||
A |
sin kt |
|
|
|
||||
2 |
|
|
2 |
|
||||
Первое из колебаний представляет собой «подпрыгивание», не сопровождающееся поворотами рамы, а второе колебаний – «галопирование», при котором центр тяжести машины остается неподвижным, и происходят угловые колебания вокруг этой точки.
Постоянные А и α (или С1 и С2) определяются заданием начальных положений и скоростей движения точки. Коэффициенты А1 и А2 определяют амплитуду соответствующих колебаний, α1 и α2 – начальные фазы, а k – угловую частоту.
Вприведенном примере рассмотрен простейший случай колебаний – собственные колебания материальной точки (правая часть уравнения Лагранжа равная нулю). В случае, когда в правой части уравнения помещают обобщенную силу вязкого трения (например, в случае, когда хотят учесть влияние эластичных шин), то в результате решения приходят к затухающим колебаниям, а при воздействии внешних возмущающих сил (например, от воздействия неровностей поля) – к вынужденным колебаниям.
Вполне конкретные примеры использования уравнения Лагранжа второго рода есть в работах В.А. и Л.А. Гоберманов [13] (пятимассовая система плнетарного редуктора), В.А. Сысуева и др. [29] (движение рулона переменной массы в питателе-измельчителе раздатчика грубых кормов), В.П. Тарасика [17] (построение модели анализа динамических нагрузок в трансмиссии автомобиля при включении сцепления) и др. Примеры таких моделей применительно к исследованию почвообрабатывающих, посевных
ипосадочных, уборочных и других машин можно найти в работах А.Б. Лу-
рье [23], [24].
Одной из наиболее ранних работ в исследовании динамики рабочих органов сельскохозяйственных машин стала модель вынужденных колебаний сошника зерновой сеялки [23].
Расчетная схема модели представлена на рис. 5.23.
Вкачестве обобщенной координаты принят угол наклона поводка сошников к раме сеялки.
105
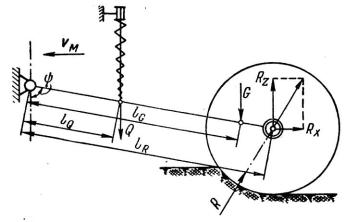
Под воздействием возмущающей силы со стороны поверхности почвы сошник совершает колебания около горизонтальной оси.
Силы, действующие на сошник, в общем случае зависят от его поло-
жения, скорости движения и времени:
Rx f1 , ,t , Rz f2 , ,t .
Рис. 5.23. Схема к выводу уравнения малых колебаний сошника
После проведения неполной линеаризации этих сил по формуле Тей-
лора
|
|
|
|
f1 |
|
|
|
|
|
|
|
f1 |
|
|
|
|
||
R |
|
|
|
|
|
|
|
|
|
|
|
|
f (t) , |
|||||
|
|
|
|
|
||||||||||||||
x |
|
|
|
|
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
0 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
f2 |
|
|
|
|
|
f2 |
|
|
|
||||||
R |
|
|
|
|
|
|
|
|
f |
(t) |
||||||||
y |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|||||||||
|
|
|
|
|
0 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
получено уравнение малых колебаний сошника в виде:
T |
2 T k f (t) , |
(5.25) |
1 |
2 |
|
где коэффициенты Т1 и Т2 |
характеризуют инерционные и демпфирующие |
|
свойства сошника при движении его в почве и имеют размерность времени, масштабный коэффициент k (коэффициент усиления) имеет размерность 1/кг, f(t) – функция внешних возмущений.
Линеаризацию функции внешних возмущений осуществлять нельзя, так как поверхность поля не может быть представлена в виде непрерывной, гладкой, дифференцируемой функции.
Полный вывод этого уравнения с использованием различных методик приведен в работах [23], [24], [31].
Существенной особенностью моделей, основанных на использовании уравнения Ж. Лагранжа, является то, что оно приводит обычно к системе дифференциальных уравнений, содержащих столько уравнений, сколько независимых координат учитывает модель. Если потребуется описать движение машины в трехмерном пространстве, т.е. помимо курсового движения учесть еще возможность поперечного крена и поворота управляемых колес в горизонтальной плоскости, то система будет содержать шесть урав-
106

нений. В случае исследования более сложных механических систем, допустим «трактор+навесная машина» и «трактор+сцепка+с.-х. машина», число дифференциальных уравнений в системе может увеличиться до нескольких десятков.
Решение систем таких уравнений приводит к значительным трудностям, и в свое время потребовало создания так называемого операционного исчисления.
Основы операционного исчисления заложены английским физиком Оливером Хевисайдом (1850…1925 гг.), который при разработке вопросов теоретической электротехники ввел основные правила действий с операто-
ром dtd P и функциями этого оператора.
В этой системе действий дифференцирование функции х = х(t) рассматривается как умножение оператора Р на функцию Х = Х(Р) этого оператора.
Иными словами |
dx |
PX (P); |
d 2 x |
P2 X (P); … |
d n x |
Pn X (P) , |
|
dt |
dt 2 |
dt n |
|||||
|
|
|
|
т.е. операции дифференцирования он заменил на умножение оператора Р в соответствующей степени на некоторую функцию этого оператора Х(Р).
Интегрирование рассматривалось как деление функции Х(Р) на этот оператор Р:
t |
X (P) |
t |
t |
X (P) |
|
||
xdt |
; dt f (t)dt |
и т.д. |
|||||
|
|
|
|||||
P |
P |
2 |
|||||
0 |
0 |
0 |
|
|
|||
|
|
|
|
||||
Самое важное в этом методе состоит в том, что его использование позволило линейные дифференциальные уравнения свести к простым алгебраическим уравнениям относительно функции Х(Р). Установив для наиболее простых функций связь между f(x) и X(P), О. Хевисайд успешно использовал такой метод при решении инженерных задач. На замечание математиков о бездоказательности такого приема О.Хевисайд якобы возражал, что не должен отказываться от обеда, если не знает поварского дела. Так или иначе, его расчеты соответствовали действительности, и он свой метод использовал.
Только через год после смерти О. Хевисайда американский инженер Д. Карсон установил связь между операционным исчислением и интегральным преобразованием Лапласа. Соотношение между функцией-оригиналом f(t) и ее изображением F(P) по Лапласу, как известно, определяется интегральным уравнением:
|
|
|
|
|
F (P) f (t)е Ptdt , |
(5.26) |
|||
0 |
|
|
|
|
где Р – некоторая в общем случае комплексная переменная Р > 0, |
||||
|
|
|
|
|
Р = α + iω, |
i 1 . |
|
||
Символически преобразование |
Лапласа |
записывают так: |
||
L f t F P . Обратную зависимость между функциями изображения и
107
оригинала нашел английский математик Т. Бромвич в виде контурного интеграла:
|
1 |
i |
|
F (P) |
|
|
|
f (t) |
|
|
еPt |
dP . |
(5.27) |
||
2 i |
|
|
|||||
|
i |
|
P |
|
|||
|
|
|
|
|
|
||
Запись соотношений между функциями-оригиналами и их изображе- |
|||||||
|
|
|
|
|
|
|
|
ниями можно встретить в виде: |
f (t) |
|
F(P) ; f (t) F (P) ; |
f (t) F(P) |
|||
|
|
|
|
|
|
|
|
для случая, когда f(t) изображается как F(P). Если необходима обратная зависимость, то F(P) f (t) , т.е. функция F(P) изображает функцию f(t).
После подстановки в уравнение (5.35) в качестве f(t) простых функ-
ций, допустим f(t)=1; f(t)=t; f (t) e t ; f(t) = sinωt; f(t)= cosωt, нетрудно
получить |
1 |
1 |
|
; |
t |
1 |
; |
e t |
1 |
; |
sin t |
|
|
; |
|||
P |
P2 |
P |
P2 |
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
cos t |
|
P |
|
. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
В современной справочной литературе приводятся многочисленные прямые и обратные соотношения между функциями-оригиналами и их изображениями. Особого внимания требует нахождение изображений производных.
Допустим, что известно изображение функции f(t)←F(P). Требуется найти изображение производной f (t)←?
В формулу интеграла Лапласа (5.26) подставим f (t) вместо f(t) и
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
найдем интеграл |
|
|
Pt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
f (t)е |
|
dt . |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проще провести это интегрирование по частям, т.е. |
|||||||||||||||||||||
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
b |
|
|
|
|
|||
|
|
|
|
|
|
|
udV |
|
uV |
|
bа Vdu . |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
a |
|
а |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P dt , а V=f(t). |
||||||
Пусть u e |
Pt |
, а dV f |
|
t dt , тогда du e |
'Pt |
||||||||||||||||
|
|
|
|
|
|||||||||||||||||
После подстановки этих значений получится: |
|
|
|||||||||||||||||||
|
Pt |
|
|
|
|
Pt |
|
|
|
|
|
Pt |
|
|
|
|
|||||
|
|
|
e |
|
|
|
|
|
|
|
|
( P)dt |
P F (P) f (0) . |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
f (t)e |
|
dt |
|
f (t) |
|
0 |
f (t)e |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Итак,
f (t) P F(P) f (0) ,
где f(0) – значение функции f(t) при начальных условиях. Совершенно аналогично можно вывести:
f |
|
|
|
2 |
|
|
|
|
(t) P |
|
F(P) P f (0) f (0) , |
||||||
|
|
3 |
F(P) P |
2 |
|
|
||
f (t) P |
|
|
f (0) P f (0) |
f (0) . |
||||
108
Эти уравнения представляют собой так называемую теорему изоб-
ражений, согласно которой операции дифференцирования оригинала соответствует умножение изображения на Р.
От уравнений, используемых О. Хевисайдом, эти соотношения отличаются только учетом начальных значений функций и их производных.
Изображение интеграла. Интегрирование оригинала от нуля до переменной точки t соответствует в пространстве изображений деление изображения на Р:
t |
F (P) |
|
|
f (t)dt |
dP . |
||
|
|||
0 |
P |
||
|
|
||
Достаточно полная таблица оригиналов и изображений, позволяющая по заданному оригиналу найти изображение и наоборот, есть, в частности, в книге «Справочник по операционному исчислению» [32] или в соответствующих разделах математической литературы [33].
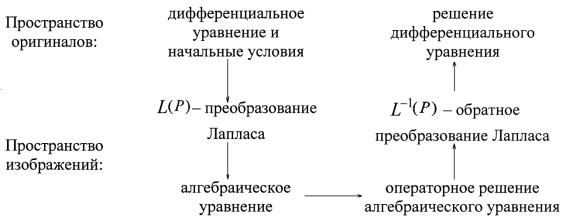
Решение дифференциальных уравнений операционным методом можно наглядно изобразить в виде схемы:
Схема
Пусть, например, требуется найти решение линейного дифференциального уравнения с постоянными коэффициентами:
y n a |
y n 1 ... a |
y f (t) . |
(5.28) |
1 |
n |
|
|
К такому виду, в частности, приводится в теории колебаний [34] общее дифференциальное уравнение вынужденных колебаний системы с учетом сил сопротивления. Примером такой модели при исследовании движения рабочих органов сельскохозяйственных машин является уравнение малых колебаний сошника сеялки [24], [31]:
Т12 Т2 кf (t) .
При исследованиях динамики механических систем их модели часто представляют в виде, как говорят «черного ящика», преобразующего определенным образом входные воздействия f(xi) c выходными, искомыми параметрами уi (рис. 5.24).
109
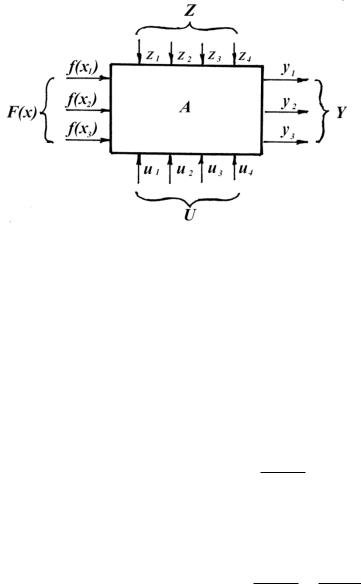
Помимо входных воздействий с вектором F(x) на работу системы могут оказывать влияние вектор состояния элементов Z и вектор U управляющих воздействий со стороны оператора. С помощью такой схемы достигается предельное абстрагирование модели от реального объекта и сосредоточение внимания на связях воздействий и результатов работы.
Свойства самой системы А могут быть описаны, как об этом было отмечено ранее, решением системы дифференциальных уравнений, связывающих входные воздействия векторов F(x), Z и U на выходные параметры Y, что, вообще говоря, представляет собой сложную задачу.
Рис. 5.24. Схема функционирования динамической системы
Гораздо проще связь входных и выходных параметров может быть установлена, если дифференциальные уравнения, связывающие эти параметры, представить в преобразованиях Лапласа.
В общем виде такая замена может быть представлена как
L1(P) Y (P) L2 (P) X (P) ,
где L1(P), L2(P) – преобразования Лапласа выходных и входных воздействий.
В этих терминах связь между входом и выходом, определяющая свойство системы А, правда в операторной форме, может быть установлена легко:
Y (P) L2 (P) X (P) .
L1(P)
Отношение преобразований Лапласа выходного параметра к входному называется передаточной функцией, которую чаще всего обозначают как W(P), т.е.
W (P) L2 (P) Y (P) . L1(P) X (P)
Таким образом, передаточная функция определяет операторную про-
водимость объекта (системы).
Если обратиться к примеру с колебаниями сошников, то в терминах «входа» и «выхода» уравнение преобразуется к виду:
Т12 у Т2 у у kх ,
110