

892
.pdfВ.П. Горячкин предложил учесть лишь главное обстоятельство, известное из курса физики: чем тяжелее тело, тем больше сила трения.
P1 = f G,
где f – коэффициент трения; G – сила веса.
Но поскольку сила Р1 затрачивается еще и на перекатывание колеса, то под коэффициентом f стали понимать не коэффициент трения, а коэф-
фициент перекатывания плуга.
Вторую составляющую Р2 В.П. Горячкин выразил по аналогии с разрушением образцов в курсе «Сопротивление материалов», как
Р2 = k а b,
где k – коэффициент крошения почвы.
Третья составляющая, Р3 найдена с использованием простых закономерностей механики.
Кинетическая энергия отбрасываемого пласта равна:
W mV12 ,
2
где m – масса отбрасываемой почвы; V1 – скорость отбрасывания пласта.
Скорость отбрасывания V1 не равна скорости движения пахотного агрегата V, но пропорциональна ей, т.е.
V1 = ε1 V.
Масса почвы, отбрасываемая в единицу времени равна: m = ρ a b V,
где ρ – плотность почвы. В таком случае
W 1 2 abV 3 , или W = ε a b V3, если обозначить ε = ρ ε12/2,
2
где ε – так называемый скоростной коэффициент.
Но кинетическая энергия W может быть представлена как величина работы в единицу времени, т.е.
W = A = P3 l1 = P3 V,
где l1 – путь, пройденный плугом в единицу времени.
Если поставить в эту формулу значения W и выразить величину Р3,
то можно получить: |
|
P3 = ε a b V2. |
|
В целом сопротивление плугу окажется равной: |
|
Р = Р1 + Р2 + Р3 = G f + k a b + ε a b V2. |
(5.10) |
Это соотношение представляет собой так называемую рациональную формулу В.П. Горячкина. В последующем эта формула была значительно усложнена с учетом многих факторов, таких, например, как изменение удельного сопротивления почвы, влияние формы лемешно-отвальной поверхности, случайного характера всех факторов, но это уже другие, более точные, но менее очевидные модели.
В ряде случаев математические модели могут быть представлены в
91
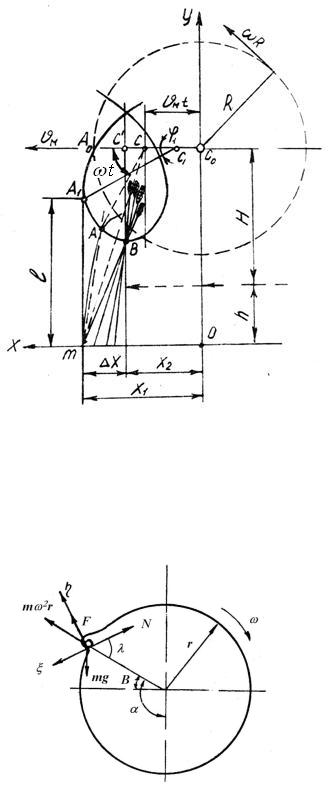
виде систем алгебраических уравнений. Примером таких моделей могут быть траектории движения рабочих органов (допустим, почвенных фрез, мотовила), записанные в параметрическом виде:
X V |
t R cos t |
|
|
M |
|
|
(5.11) |
|
|
. |
|
Y H h R sin t |
|
||
|
|
|
|
Рис. 5.16. Схема работы планки мотовила
Часто такими моделями пользуются при описании условий статической устойчивости, например, для определения фазы поворота триерного
цилиндра, до которого семена могут находиться в ячейках. |
|||||
|
|
0, |
|
|
0 , |
|
P |
|
P |
||
где η и – подвижные оси координат, направленные по касательной к поверхности ячейки и перпендикулярно ей.
Рис. 5.17. Условия устойчивого положения семян в ячейках
92
5.5.2. Математические модели в виде дифференциальных уравнений,
составленных с использованием принципа Даламбера
Математические модели, представленные обыкновенными дифференциальными уравнениями, нашли широкое применение для описания взаимодействия рабочих органов сельскохозяйственных машин с обрабатываемой средой, для анализа движения динамических систем, для различного рода возмущений, воздействующих на сельскохозяйственную технику, при исследовании различных физических явлений – гидравлических, электрических, электромагнитных и т.д.
Широкое использование обыкновенных дифференциальных уравнений объясняется рядом причин. Во-первых, теория дифференциальных уравнений достаточно хорошо разработана; во-вторых, модели, составленные из дифференциальных уравнений, оказались настолько удачными, что нашли применение не только в задачах механики, но и для описания различных процессов в биологии, агрономии, что очень значимо именно для земледельческой механики, имеющей непосредственную связь с живой природой.
Существует много методов составления моделей на основе дифференциальных уравнений. При исследовании сельскохозяйственной техники наиболее распространенным является использование принципа Ж. Даламбера, уравнений Ж. Лагранжа и П. Аппеля.
Принцип Ж. Даламбера состоит в том, что сила инерции движущейся массы (по модулю равная произведению массы на ее ускорение) уравновешивается суммой проекций всех действующих на эту частицу сил (или про-
екций сил) в направлении возможного перемещения, т.е. mx Px .
В качестве примера может быть представлена задача описания движения материала по шероховатой поверхности, очень основательно изученная в свое время проф. П.М. Василенко [26].
При исследовании работы центробежных распределительных дисков машин для внесения удобрений необходимо определять скорость схода удобрений с диска, время пребывания их на диске в зависимости от размеров и режима работы распределительного аппарата.
Если рассмотреть движение удобрений в самом простом случае по радиальным лопастям плоского диска (рис.5.18), то силами, действующими на удобрения, являются центробежная сила mω2x, сила Кориолиса, действующая на лопасть 2m x , силы трения (удобрений по лопасти 2 fm x и
по поверхности самого горизонтального диска fmg).
Предполагается, что коэффициент трения удобрений f по лопасти и диску одинаков.
Дифференциальное уравнение движения удобрений вдоль лопасти имеет вид:
|
|
mx m 2 x 2 fm x fmg , |
(5.12) |
поскольку проекция силы Кариолиса на лопасть окажется равной нулю.
93
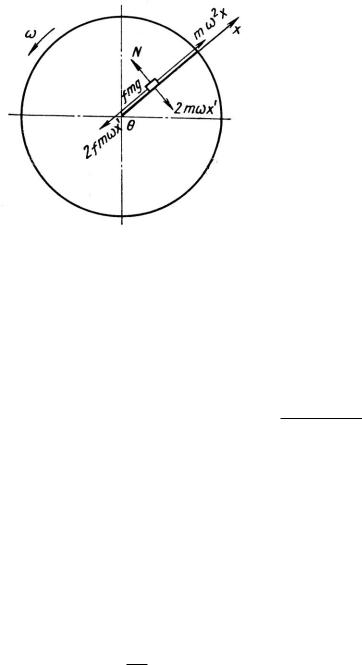
После сокращения правой и левой частей на m и переноса неизвестных в левую часть соотношение (5.20) сводится к неоднородному линейному дифференциальному уравнению:
x 2 f x 2 x fg .
Рис. 5.18. Схема сил, действующих на частицу, движущуюся по радиальным лопастям плоского диска
Известно, что решение такого уравнения включает в себя общий и частный х1 интегралы:
х = u + x1.
Общий интеграл находят в зависимости от вида корней характеристического уравнения:
2 2 f 2 0 .
Корни этого квадратного уравнения оказываются действительными числами и отличаются друг от друга:
1,2 f 
 f 2 2 2 .
f 2 2 2 .
В этом случае общее решение дифференциального уравнения имеет
вид:
u c1е 1t c2е 2t ,
где с1 и с2 – постоянные интегрирования.
В случае, когда в правой части дифференциального уравнения находится постоянная величина, то частный интеграл повторяет ее вид, т.е. тоже является постоянной величиной, х1 = А.
Если А подставить в дифференциальное уравнение, то окажется, что
0 + 2f ω0 - ω2A = -fg.
Откуда А fg .
Таким образом
|
|
x u x |
c е 1t |
c е 2t |
fg |
. |
(5.13) |
|
|
|
|
||||||
|
|
1 |
1 |
2 |
2 |
|
||
|
|
|
|
|
|
|||
Постоянные интегрирования с1 и с2 |
находят из начальных условий |
|||||||
|
|
0 , |
|
|
|
|
|
|
при t = 0, x = r0; х |
|
|
|
|
|
|
|
|
где r0 – место подачи удобрений на диск.
94

Из первого условия следует, что |
|
|
|
|
|
|
|||||
r |
c е 1 0 |
c е 2 0 |
|
fg |
, или |
c c |
|
r |
|
fg |
. |
0 |
1 |
2 |
2 |
|
1 |
2 |
0 |
2 |
|||
|
|
|
|
|
|
|
|||||
Чтобы воспользоваться вторым начальным условием, необходимо иметь уравнение, описывающее скорость относительного движения удобрений вдоль лопасти. Для получения такого уравнения можно продифференцировать соотношение, определяющее перемещение (5.13):
x с е 1t |
c |
е 2t |
(5.14) |
|||||||
1 |
|
1 |
|
|
2 |
|
2 |
|
|
|
Учитывая второе начальное условие (при t = 0 , х 0 ), можно найти: |
||||||||||
|
|
|
|
|
|
|
|
е 2 0 0 |
|
|
x с е 1 |
0 |
c |
|
|
||||||
1 |
1 |
|
|
2 |
|
2 |
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
с1 t c2 2 0 . |
|
|||||||||
После решения системы уравнений: |
|
|
|
|
|
|
|
|||
c1 c2 |
r0 |
|
fg |
|
|
|||||
|
|
|
|
|||||||
2 |
|
|||||||||
|
|
|
|
|
|
|
, |
|
||
с |
с |
0 |
|
|
|
|||||
1 1 |
|
2 |
2 |
|
|
|
|
|
|
|
нетрудно определить с1 и с2 : |
|
|
|
|
|
|
|
|||||
c1 |
|
|
|
|
r 2 fg |
; |
c2 |
|
|
|
r 2 fg |
. |
|
2 |
0 |
|
1 |
0 |
|||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
2 |
|
||
|
|
1 |
2 |
|
|
|
|
1 |
2 |
|
|
|
После подстановки этих значений в (5.13) и (5.14) определяются уравнения, описывающие перемещения и скорости удобрений в произвольный момент времени:
x |
r0 fg |
|
|
|
е 2t е 1t |
fg |
, |
(5.15) |
||||||
2 |
|
|
2 |
|||||||||||
|
|
|
1 |
|
|
2 |
|
|
||||||
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
||
x |
r0 2 fg |
|
|
|
|
1 2 |
|
|
е 2t е 1t . |
|
(5.16) |
|||
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
В момент схода частиц с диска х = R (где R – радиус диска), т.е.
R |
r0 fg |
|
|
е 2t е 1t |
fg |
. |
|||
2 |
|
|
|
||||||
|
1 |
2 |
2 |
||||||
|
|
1 |
2 |
|
|
|
|
|
|
Решив это уравнение относительно t, находят время пребывания удобрений на диске, а после подстановки этого времени в уравнение (5.16) – радиальную скорость частиц при сходе с дисков. Начальная скорость схода частиц с дисков при радиальных лопастях будет равна:
V |
|
2 R2 V 2 . |
(5.17) |
нач |
|
x |
|
Движение удобрений после схода с распределительных дисков также может быть описано дифференциальным уравнением, составленным с использованием принципа Ж. Даламбера (рис. 5.19):
mx Rx ,
где Rx – сила сопротивления воздуха.
95
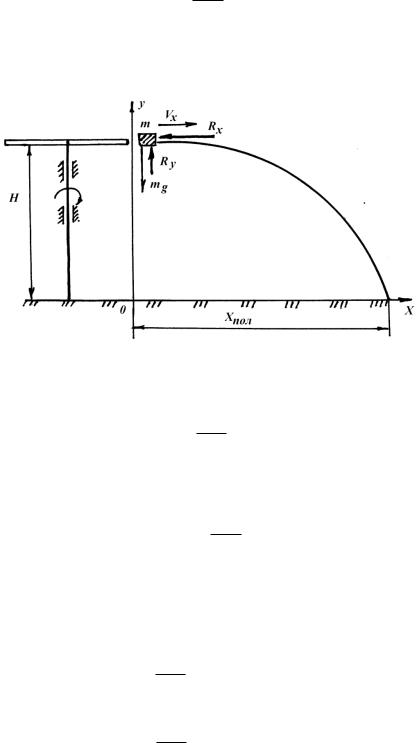
В диапазоне возможных скоростей полета сила Rx может быть найде-
на по формуле И. Ньютона:
Rx k F x 2 , g
где k – коэффициент, зависящий от шероховатости тела; ρ = γ/g – плотность среды;
F – площадь Миделева сечения.
Рис. 5.19. Движение удобрений после схода с центробежного диска
После подстановки Rx в дифференциальное уравнение получаем:
x k F x 2 . mg
Дробь, стоящую перед (x)2 , в правой части называют коэффициен-
том парусности:
Кп k F . mg
С учетом этого уравнение приобретет вид:
x Kп x2 .
Решение данного уравнения может быть осуществлено методом понижения порядка:
dVdtx KnVx2 ;
или после разделения переменных:
dVx Kndx , Vx
так как Vxdt = dx.
Интегрируя правую и левую части, получаем: ln Vx ln e kn x ln c1 ,
где с1 – постоянная интегрирования.
96

После потенцирования получится, что
Vx c1 e kn x .
Постоянную с1 можно найти из начальных условий, поскольку при
х= 0, Vx = Vнач, тогда
Vx Vнач e Kn x .
Для нахождения дальности полета требуется еще раз произвести понижение порядка, т.е.
|
|
|
dx |
V |
e K n x , |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
dt |
нач |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
откуда eK n x dx V |
dt . |
|
|
|
|
|
|||
нач |
|
|
|
|
|
|
|
|
|
После интегрирования правой и левой частей оказывается, что |
|||||||||
|
|
1 |
eKn x V |
|
t c |
|
, |
||
|
|
|
|
2 |
|||||
|
|
Kn |
нач |
|
|
||||
|
|
|
|
|
|
|
|||
где с2 – очередная постоянная интегрирования, которую можно найти из начальных условий – при t = 0 перемещение х = 0:
|
1 |
eKn 0 V |
0 c |
или с |
1 |
. |
|
|
нач |
1 |
1 |
Kn |
|
|
Kn |
|
|
|||
В этом случае |
|
|
|
|
||
|
1 |
eK n X V |
t |
1 |
. |
|
|
|
|||
|
|
нач |
Kn |
||
|
Kn |
|
|||
После умножения всех слагаемых правой и левой частей данного |
|||||
уравнения на Кп и логарифмирования оказывается, что |
|||||
Kn x ln(Vнач t Kn 1) .
При определении времени падения частиц с высоты Н до поверхности почвы сопротивление среды обычно не учитывают, так как скорость падения относительно мала.
В таком случае, поскольку H |
gt 2 |
, то t |
|
2H |
|
. |
|
|
|||||
2 |
|
|
g |
|||
Попытки найти это время с учетом сопротивления среды показали, что уточнение оказывается незначительным.
С учетом этого дальность полета частиц может быть определена:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Н |
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||||
|
|
|
ln Vнач |
|
g |
|
Кп 1 |
|
|
x |
|
|
|
|
|
|
. |
(5.18) |
|
|
|
|
|
||||||
пол |
|
Kn |
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
Уравнения (5.15), (5.16) и (5.18), представляющие собой основные технологические характеристики процесса, введены в компьютерную программу, позволяющую провести вычислительный эксперимент при анализе зависимости дальности полета, а, следовательно, и ширины захвата машины от таких параметров, как частота вращения дисков, размер дисков, места подачи удобрений на диск. Поскольку исходная модель, введенная в компьютер, была не-
97
сколько усложнена с учетом возможностей изменения углов наклонов лопастей и анализа конусных дисков, то дополнительно появилась возможность провести вычислительный эксперимент и для этих параметров. Анализ результатов вычислительного эксперимента показывает, в частности, что для обеспечения большой ширины захвата необходимо использовать конусный диск с углом бросания 10…15 и вносить гранулированные удобрения.
5.5.3. Математические модели, основанные на использовании уравнений Ж.Лагранжа
Уравнения Ж. Лагранжа, основанные на общем уравнении динамики механических систем, представляют собой наиболее обоснованный подход к образованию моделей.
Идея, лежащая в основе общего уравнения, состоит из использования принципа Ж. Даламбера, позволяющего записывать динамические уравнения в виде уравнений равновесия с добавлением к действующим активным силам сил инерции.
Но если такая система сил уравновешена, то к ней применим принцип возможных перемещений Лагранжа.
Последовательное применение этих принципов к движущейся механической системе позволяет сформулировать принцип ДаламбераЛагранжа: если к движущейся механической системе, на которую наложены голономные связи, условно приложить силы инерции всех ее точек, то в каждый момент времени сумма элементарных работ активных сил и сил
инерции равна нулю на любом возможном перемещении системы, т.е. |
|
Qi Ri mi qi 0 , |
(5.19) |
где Qi, Ri – соответственно равнодействующие всех активных сил и |
|
реакций связей, приложенных к той или иной точке Мi; |
|
miqi – сила инерции точки Мi массой mi в направлении qi;
i = (1…n) – номер точки М в динамической системе.
Если мысленно зафиксировать время t, и дать системе виртуальное перемещение δri (i = 1…n), перемножить на него каждое слагаемое уравнения (5.19) и сложить результат, то
n |
n |
|
Qi mi qi ri Ri ri 0 . |
(5.20) |
|
i 1 |
i 1 |
|
Под связями механической системы понимают ограничения, стесняющие движение тел. Обычно это шарнирные опоры, опорные поверхности, жесткие или упругие заделки стержней и балок и т.п.
В общем случае уравнение связи, налагаемой на систему точек, запи-
сывается в виде: |
|
|
|
|
|
|
|
|
f x y z .....x y z |
|
|
|
|
|
|
;t 0 . |
|
n |
; x |
y .....x y z |
n |
|||||
1 i i |
n n |
1 |
1 |
n |
n |
|
||
|
|
|
|
|
|
|
|
|
В зависимости от вида данной функции связи делятся так:
-геометрические и дифференциальные;
-стационарные и нестационарные;
-удерживающие и неудерживающие.
98
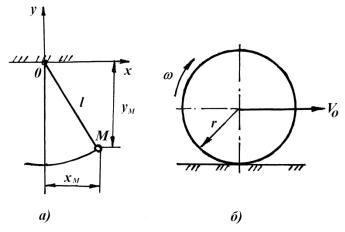
К геометрическим относятся связи, в уравнения которых входят только координаты точек системы, и, может быть, время. Например, в случае математического маятника с подвесом в начале координат (рис. 5.20а) уравнение связи имеет вид:
хМ2 уМ2 l2 или
xM2 yM2 l2 0 .
Рис. 5.20. Виды связей динамических систем: а – геометрические, б – дифференциальные
Дифференциальными называются связи, уравнения которых, кроме координат точек системы, содержат и первые производные от этих координат по времени и, может быть, время. Примером дифференциальной связи может быть ограничение, накладываемое на колесо, катящееся без скольжения по неподвижной поверхности (рис. 5.20б).
В этом случае скорость центра колеса и его угловая скорость связаны между собой:
V0 = ω r, или V0 – ω r = 0 .
К голономным относятся все геометрические связи, а также те из дифференциальных, которые путем интегрирования могут быть сведены к геометрическим.
Рассмотренная выше дифференциальная связь, наложенная на колесо, является голономной, так как ее уравнение можно проинтегрировать и свести к геометрической.
Действительно, V0 = ω r, т.е. dx0 = r dθ,
x0 |
|
и dx0 |
rd , откуда x0 = r θ + c, где с – постоянная интегрирования. |
0 |
0 |
Виртуальные перемещения – это воображаемые бесконечно малые перемещения системы из одного ее положения в другое, допускае-
мое связями в тот же момент времени без освобождения от связей.
~
Виртуальным перемещением r соответствуют изменения координат и обозначаются δх, δу, δz, в отличие от обозначения дифференциалов dx, dy и dz.
99
Дифференциалы представляют собой тоже бесконечно малые изменения координат, но за определенный, пусть малый промежуток времени dt, под действием приложенных к системе сил.
Операции дифференцирования и варьирования являются независимыми одна за другой, поэтому имеет место равенство:
δ(df)=d(δf),
где f – какая-либо непрерывная функция координат, скоростей и вре-
мени.
Изменения функции f от вариаций координат, т.е. δf(x,y,z,t) называется вариацией функции f.
Если сумма элементарных работ на всех виртуальных перемещениях системы равна нулю, т.е. если
n
Ri ri 0 ,
i 1
или то же самое в проекциях на оси координат
n Rix xi Riy yi Riz zi 0 ,
i 1
то связи называют идеальными.
Идеальными связями будут, например, абсолютно гладкие (без трения) опорные поверхности, нерастяжимые, несжимаемые и несгибаемые стержни и т.п., входящие в состав основных допущений в задачах, представляющих собой первое приближение к действительности.
Независимые или обобщенные координаты. Если система состоит из
N точек, то ее пространственное положение может быть описано 3N координатами (x,y,z). При наличии S голономных связей, ограничивающих перемещения, положения точек описывают через остальные, независимые ко-
ординаты.
Часто вместо обычных, декартовых координат выбирают другие, связанные с ними величины, иногда другой природы и размерности.
Эти независимые величины называют обобщенными координатами, например q1,q2,q3,….,qn, где n = 3N - S, причем n называют числом степеней свободы.
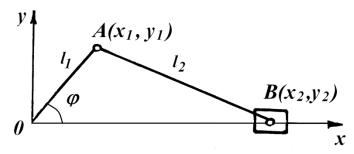
Пусть, например, исследуется работа кривошипно-шатунного механизма (рис. 5.21)
Рис. 5.21. Схема к выбору обобщенной
координаты кривошипно-шатунного механизма
Положение точек О, А и В определяется шестью координатами: х0у0; х1у1; х2у2.
100