

34Удар по вращающемуся телу. Определение реактивных ударных импульсов. Центр удара. Рассмотрим атт массы м, закрепленное в точке о подпятником, а в точке в – подшипником (рис1).
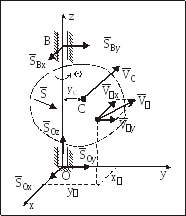
Рис1
Пусть
при этом ОВ=![]() .
Введем неизменно связанную с АТТ систему
координат Охyz
с осью Оz, которая направлена по оси
вращения АТТ, и плоскостью Оyz, проведенной
через центр масс С.
.
Введем неизменно связанную с АТТ систему
координат Охyz
с осью Оz, которая направлена по оси
вращения АТТ, и плоскостью Оyz, проведенной
через центр масс С.
При
действии на АТТ ударного импульса
![]() возникают реактивные ударные импульсы
возникают реактивные ударные импульсы![]() и
и![]() .
При этом реактивный ударный импульс в
точке О может быть разложен на три
составляющие
.
При этом реактивный ударный импульс в
точке О может быть разложен на три
составляющие![]() ,
,![]() ,
,![]() ,
а в точке В – на две составляющие
,
а в точке В – на две составляющие![]() ,
,![]() .
.
Для определения этих пяти неизвестных воспользуемся теоремами о движении центра масс
 (1)
(1)
и об изменении кинетического момента СМТ
 (2)
(2)
при ударе в проекциях на оси декартовой системы координат.
Так
как АТТ за время удара перемещается
бесконечно мало, то векторы
![]() будут параллельны оси Оx и, следовательно,
будут параллельны оси Оx и, следовательно,
![]()
где yC – расстояние центра масс АТТ от оси вращения z , а 0 и – угловые скорости АТТ соответственно до и после удара.
Учитывая, что в данном случае , а, из формулы

получим:

Проектируя соотношение

На оси декартовой системы координат Oxyz, получим проекции кинетического момента атт до удара на эти оси:
![]()
Аналогично для проекций кинетического момента АТТ после удара на оси декартовой системы координат получим:
![]()
Подставив все эти значения в уравнения (1) и (2), имеем:
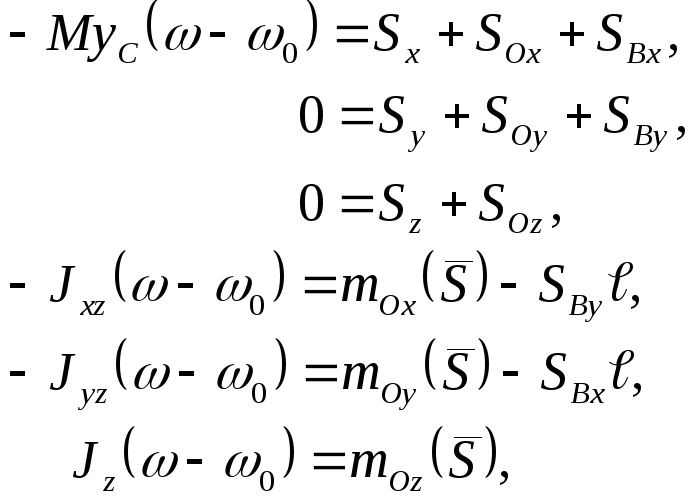 (3)
(3)
где
![]() – моменты ударного импульса относительно
осей декартовой системы координат.
– моменты ударного импульса относительно
осей декартовой системы координат.
Из
первых пяти уравнений (3) могут быть
найдены пять неизвестных реактивных
импульсов
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
Из шестого уравнения (3) определяется
изменение угловой скорости АТТ (
– 0),
вращающегося вокруг неподвижной оси
при ударе.
.
Из шестого уравнения (3) определяется
изменение угловой скорости АТТ (
– 0),
вращающегося вокруг неподвижной оси
при ударе.
Найдем условия отсутствия ударных реактивных импульсов.
Для этого в первых пяти уравнениях (3) положим их равными нулю. Тогда уравнения (3) примут вид:
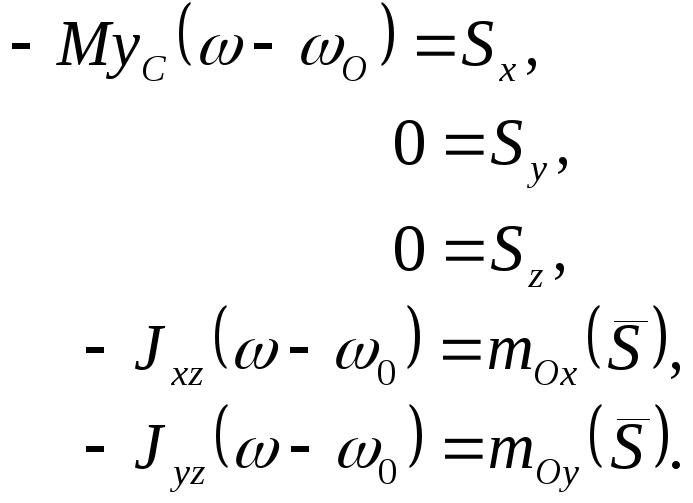 (4)
(4)
Из второго и третьего уравнений (4) следует, что для отсутствия ударных реактивных импульсов необходимо, чтобы приложенный ударный импульс был направлен параллельно оси Оx, то есть перпендикулярно плоскости yОz, которая проходит через ось вращения и центр масс АТТ (рис2).

Рис. 2
Так
как систему координат можно выбрать
произвольно, то выберем ее такой, чтобы
ударный импульс
![]() лежал в координатной плоскости x1O1y1
(точка О1
расположена на оси вращения z). Тогда,
направив
лежал в координатной плоскости x1O1y1
(точка О1
расположена на оси вращения z). Тогда,
направив
![]() согласно условиям
согласно условиям![]() параллельно оси O1x1,
получим:
параллельно оси O1x1,
получим:
![]()
В результате четвертое и пятое из уравнений (4) дадут условия:
![]() ,
,
то есть ось вращения z для точки О1 должна быть главной осью инерции.
Следовательно,
для отсутствия ударных реактивных
импульсов необходимо расположить
ударный импульс
![]() в плоскости x1O1y1,
проходящей через точку О1,
для которой ось z является главной осью
инерции.
в плоскости x1O1y1,
проходящей через точку О1,
для которой ось z является главной осью
инерции.
Первое соотношение (4) примет вид:
![]() (5)
(5)
Так
как в рассматриваемом случае
![]() ,
где
,
где![]() – кратчайшее
расстояние линии действия ударного
импульса
– кратчайшее
расстояние линии действия ударного
импульса
![]() от оси вращения z, то шестое соотношение
формулы (4) примет вид:
от оси вращения z, то шестое соотношение
формулы (4) примет вид:
![]() .
(6)
.
(6)
Из
уравнений (5) и (6) найдем после исключения
разности
![]() следующее соотношение:
следующее соотношение:
![]() (7)
(7)
Таким
образом, уравнение (5) будет иметь место
при любой численной величине ударного
импульса
![]() ,
если линия действия этого импульса
будет проходить через точку К, которая
отстоит от оси вращения z на расстоянии
yК,
определяемом формулой (7).
,
если линия действия этого импульса
будет проходить через точку К, которая
отстоит от оси вращения z на расстоянии
yК,
определяемом формулой (7).
Условиями отсутствия ударных реактивных импульсов АТТ, вращающегося вокруг неподвижной оси, являются:
![]() ударный
импульс должен быть перпендикулярен
плоскости, проходящей через ось вращения
z и центр масс АТТ;
ударный
импульс должен быть перпендикулярен
плоскости, проходящей через ось вращения
z и центр масс АТТ;
![]() ударный
импульс должен быть расположен в
плоскости, перпендикулярной оси z и
проходящей через точку О1
АТТ, для которой ось z является главной
осью инерции;
ударный
импульс должен быть расположен в
плоскости, перпендикулярной оси z и
проходящей через точку О1
АТТ, для которой ось z является главной
осью инерции;
![]() точка
приложения К ударного импульса должна
находиться от оси z на расстоянии,
определяемом формулой (7) (точку К, через
которую при этом проходит линия действия
ударного импульса, не вызывающего
ударных реакций в точках закрепления
оси, называют центром
удара).
точка
приложения К ударного импульса должна
находиться от оси z на расстоянии,
определяемом формулой (7) (точку К, через
которую при этом проходит линия действия
ударного импульса, не вызывающего
ударных реакций в точках закрепления
оси, называют центром
удара).