

2.3. Уравнение движения электропривода
Выше были рассмотрены условия работы электропривода в установившемся режиме, когда момент, развиваемый двигателем, равен моменту сопротивления механизма и скорость привода является постоянной. Однако во многих случаях привод ускоряется или замедляется, и тогда возникает инерционная сила или инерционный момент, которые двигатель должен преодолевать, находясь в переходном режиме. Таким образом, переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, реверс и т. п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети и т. п.).
Уравнение движения электропривода должно учитывать все силы и моменты, действующие в переходных режимах.
При
поступательном движении движущая сила
![]() всегда уравновешивается силой
сопротивления машины
всегда уравновешивается силой
сопротивления машины
![]() и
инерционной силой
и
инерционной силой
![]() ,
возникающей при изменениях скорости.
,
возникающей при изменениях скорости.
В соответствии с изложенным уравнение равновесия сил при поступательном движении записывается так:
|
|
(2.11) |
Аналогично уравнение равновесия моментов для вращательного движения (уравнение движения привода) имеет следующий вид:
|
|
(2.12) |
Уравнение
(2.12) показывает, что развиваемый двигателем
вращающий момент
![]() уравновешивается моментом сопротивления
уравновешивается моментом сопротивления![]() на его валу и инерционным или динамическим
моментом
на его валу и инерционным или динамическим
моментом![]() .
В (2.11) и (2.12) принято, что масса тела
.
В (2.11) и (2.12) принято, что масса тела![]() и соответственно момент инерции привода
и соответственно момент инерции привода![]() являются постоянными, что справедливо
для значительного числа производственных
механизмов. Из анализа (2.12) видно:
являются постоянными, что справедливо
для значительного числа производственных
механизмов. Из анализа (2.12) видно:
1)
при
![]()
![]() >
0, т. е. имеет место ускорение привода;
>
0, т. е. имеет место ускорение привода;
2)
при
![]()
![]() <
0, т. е. имеет место замедление привода
(очевидно, что замедление привода может
быть и при отрицательном значении
момента двигателя);
<
0, т. е. имеет место замедление привода
(очевидно, что замедление привода может
быть и при отрицательном значении
момента двигателя);
3)
при
![]()
![]() =
0, в данном случае привод работает в
установившемся режиме.
=
0, в данном случае привод работает в
установившемся режиме.
Вращающий момент, развиваемый двигателем при работе, принято считать положительным, если он направлен в сторону движения привода. Если он направлен в сторону обратную движению, то он считается отрицательным.
Уравнение
движения позволяет проводит анализ
соответствия зависимостей скорости
![]() и момента двигателя
и момента двигателя![]() в реальных осциллограммах. Покажем это
на конкретных примерах.
в реальных осциллограммах. Покажем это
на конкретных примерах.
На рис. 2.5 приведена осциллограмма пуска электропривода при активном моменте сопротивления (подъем груза).
Для анализа весь процесс пуска разбиваем на 4 этапа.
Первый
этап
![]() .
На этом этапе момент двигателя возрастает
от 0 до
.
На этом этапе момент двигателя возрастает
от 0 до![]() ,
динамический момент
,
динамический момент![]() вследствие чего ускорение привода
вследствие чего ускорение привода![]() ,
а привод под действием активного момента
сопротивления (под действием груза)
разгоняется в обратную сторону. При
,
а привод под действием активного момента
сопротивления (под действием груза)
разгоняется в обратную сторону. При![]()
![]() ускорение
ускорение![]()
![]() в
кривой скорости наступает перелом
(касательная к кривой скорости параллельна
оси времени).
в
кривой скорости наступает перелом
(касательная к кривой скорости параллельна
оси времени).
Второй
этап
![]() .
На этом этапе момент двигателя от
.
На этом этапе момент двигателя от![]() увеличивается до максимального
увеличивается до максимального![]() ,
что обеспечивает возрастание ускорения
от 0 до максимального
,
что обеспечивает возрастание ускорения
от 0 до максимального![]() (наклон
касательных кривой скорости к оси
времени увеличивается).
(наклон
касательных кривой скорости к оси
времени увеличивается).
Третий
этап
![]() .
На этом этапе момент двигателя
.
На этом этапе момент двигателя![]() ,
ускорение
,
ускорение![]() (скорость
изменяется по линейному закону).
(скорость
изменяется по линейному закону).
Четвертый
этап
![]() .
На этом этапе момент двигателя уменьшается
от
.
На этом этапе момент двигателя уменьшается
от![]() до
до![]() ,
ускорение снижается от
,
ускорение снижается от![]() до нуля.
до нуля.
Выше
изложенной подтверждается построенной
зависимостью
![]() .
.

Рис. 2.5. Осциллограмма пуска электропривода при активном моменте сопротивления
На рис. 2.6 приведена осциллограмма пуска электропривода при реактивном моменте сопротивления.
Основным
отличием от предыдущего случая является
1 этап. На этом этапе
![]() скорость привода
скорость привода![]() .
.
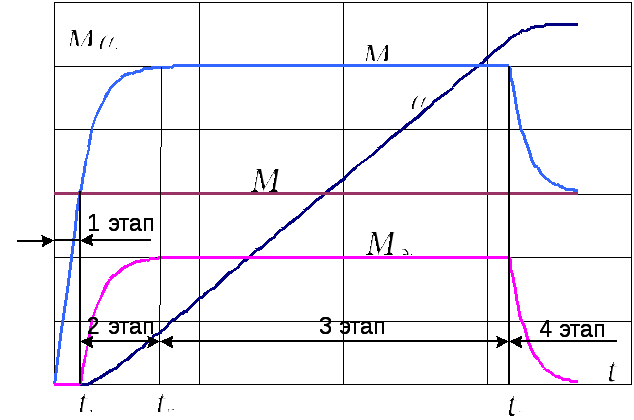
Рис. 2.6. Осциллограмма пуска электропривода при реактивном моменте сопротивления
На рис. 2.7 приведена осциллограмма реверса электропривода при реактивном моменте сопротивления.
Для анализа весь процесс пуска разбиваем на 4 этапа.
Первый
этап
![]() .
На этом этапе момент двигателя изменяется
от
.
На этом этапе момент двигателя изменяется
от![]() до
до![]() ,
динамический момент
,
динамический момент![]() в следствие чего ускорение привода
в следствие чего ускорение привода![]() и привод тормозится под действием
момента сопротивления и тормозного
двигателя. При
и привод тормозится под действием
момента сопротивления и тормозного
двигателя. При![]() момент двигателя достигает значения
момент двигателя достигает значения![]() ,
что обеспечивает возрастание ускорения
от 0 до максимального
,
что обеспечивает возрастание ускорения
от 0 до максимального![]() (.
(.

Рис. 2.7. Осциллограмма реверса
На
2 этапе момент двигателя
![]() ,
,
динамический
момент
![]() ,
ускорение
,
ускорение![]() ,
скорость уменьшается по линейному
закону до нуля. При
,
скорость уменьшается по линейному
закону до нуля. При![]() скорость
скорость![]() момент сопротивления
момент сопротивления![]() меняет свой знак.
меняет свой знак.
На
3 этапе момент двигателя
![]() ,
динамический момент
,
динамический момент![]() ,
ускорение
,
ускорение![]() ,
скорость увеличивается по линейному
закону в обратную сторону. Динамический
момент по абсолютной величине на 3 этапе
по сравнению со 2 уменьшается, а значит
и ускорение по абсолютной величине на
этом этапе меньше.
,
скорость увеличивается по линейному
закону в обратную сторону. Динамический
момент по абсолютной величине на 3 этапе
по сравнению со 2 уменьшается, а значит
и ускорение по абсолютной величине на
этом этапе меньше.
На
4 этапе момент двигателя по абсолютной
величине уменьшается от
![]() до
до![]() ,
ускорение снижается от до нуля.
,
ускорение снижается от до нуля.
Выше
изложенное подтверждается построенной
зависимостью
![]() .
.
На рис. 2.8 приведена осциллограмма ударного приложения нагрузки. Характер переходного процесса колебательный.
Соответствие
кривых перепада скорости
![]() и момента двигателя
и момента двигателя![]() весьма наглядно характеризуются
следующими характерными точками.
весьма наглядно характеризуются
следующими характерными точками.
При
![]() ,
,![]() момент двигателя достигает значение
момента сопротивления
момент двигателя достигает значение
момента сопротивления![]() ,
а это значит
,
а это значит![]() ускорение
ускорение![]()
![]() в
кривой скорости наступает перелом
(касательная к кривой скорости параллельна
оси времени).
в
кривой скорости наступает перелом
(касательная к кривой скорости параллельна
оси времени).
При
![]() ,
момент двигателя достигает максимального
значения, а это значит, что динамический
момент
,
момент двигателя достигает максимального
значения, а это значит, что динамический
момент![]() и ускорение
и ускорение![]() максимальны.
максимальны.
При
![]() ,
момент двигателя достигает минимального
значения, а это значит, что динамический
момент
,
момент двигателя достигает минимального
значения, а это значит, что динамический
момент![]() абсолютной величине на этом этапе
максимальный и ускорение (замедление)
абсолютной величине на этом этапе
максимальный и ускорение (замедление)![]() также максимально.
также максимально.

Рис. 2.8. Осциллограмма ударного птложения нагрузки