Лекция 9
5.4. Формирование переходных процессов
Условия работы производственных механизмов требуют от электропривода обеспечения соответствующего формирования переходных режимов, направленного на достижение либо максимального быстродействия, либо минимума потерь, либо ограничения динамических нагрузок, возникающих в элементах кинематических цепей, связывающих электропривод с рабочим органом машины, и т. д.
Управление переходными процессами электропривода может создать максимальное быстродействие при соответствующих ограничениях. Например, для двигателя постоянного тока .одно из таких ограничений состоит в том, что ток в якоре не должен по условиям коммутации превосходить 2—2,5-кратного значения номинального.
В
большинстве случаев надо так формировать
переходные процессы, чтобы ограничивать
угловое ускорение привода, т. е. первую
производную угловой скорости
![]() и ограничивать вторую производную
угловой скорости
и ограничивать вторую производную
угловой скорости![]() (рывок) или первую производную момента
двигателя
(рывок) или первую производную момента
двигателя![]() при
при![]() .
.
В качестве примера можно сослаться на электропривод лифта, где необходимо ограничить ускорение, превышение которого неблагоприятно сказывается на самочувствии пассажиров и важно для снижения динамических усилий в канатах и кабине лифта.
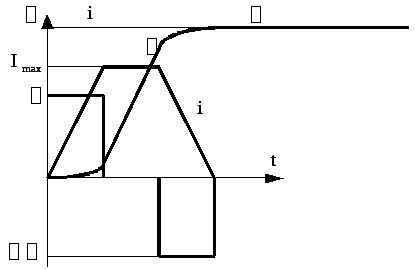
Графики
зависимости угловой скорости, углового
ускорения (или пропорционального ему
тока при
![]() и производной углового ускорения от
времени, обеспечивающие требуемое
ограничение динамических нагрузок,
приведены на рис. 5.22.
и производной углового ускорения от
времени, обеспечивающие требуемое
ограничение динамических нагрузок,
приведены на рис. 5.22.
|
|
Рассмотрим формирование переходных процессов при линейном законе нарастания управляющего воздействия на выходе тиристорного преобразователя, питающего двигатель постоянного тока независимого возбуждения. Так как тиристорный преобразователь практически безинерционный, то линейный закон нарастания управляющего воздействия обеспечивает линейный закон нарастания ЭДС преобразователя
|
|
Рис. 5.22. Графики зависимостей скорости, ускорения и производной ускорения (рывка) от времени, обеспечивающие ограничение динамических нагрузок привода
|
Примем,
что
![]() имеет такое достаточно малое значение,
которое позволяет пренебречь влиянием
на переходный процесс электромагнитной
инерции (индуктивности якорной цепи).
имеет такое достаточно малое значение,
которое позволяет пренебречь влиянием
на переходный процесс электромагнитной
инерции (индуктивности якорной цепи).
С учетом электромеханических процессов система уравнений, описывающая поведение электропривода, имеет вид
|
|
|
![]() Решение
полученной системы уравнений относительно
скорости дает дифференциальное уравнение
Решение
полученной системы уравнений относительно
скорости дает дифференциальное уравнение
|
|
(5.24) |
где
![]() - угловое ускорение;
- угловое ускорение;
![]() -
электромеханическая постоянная времени
электропривода;
-
электромеханическая постоянная времени
электропривода;
![]() .
.
Решение (5.24) имеет вид
![]()
где
![]() -
постоянная интегрирования, определяемая
из начальных условий.
-
постоянная интегрирования, определяемая
из начальных условий.
При
![]()
![]() .
Из последнего уравнения при
.
Из последнего уравнения при![]() следует
следует![]() .
.
В итоге расчетное уравнение для скорости двигателя принимает вид
|
|
(5.25) |
а для тока и момента
|
|
(5.26) |
5.4.1. Пуск привода вхолостую
Расчет
переходных процессов пуска при
![]() ,
,![]() ведется в два этапа. На первом этапе
выпрямленная изменяется от нуля
ведется в два этапа. На первом этапе
выпрямленная изменяется от нуля![]() до
до
![]() .
Продолжительность первого этапа
.
Продолжительность первого этапа![]() .
Начальные условия на первом этапе
.
Начальные условия на первом этапе![]() ,
,![]() ,
,![]() ,
,![]() .
Уравнения (5.25) и (5.26) принимают вид
.
Уравнения (5.25) и (5.26) принимают вид
|
|
(5.27) |
|
|
(5.28) |
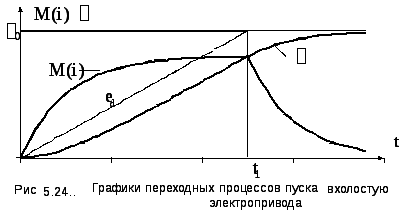
Согласно
уравнения (5.28) момент (ток) при
![]() достигает практически своего максимального
(установившегося) значения
достигает практически своего максимального
(установившегося) значения![]() (рис. 5.23), что обеспечивает постоянное
угловое ускорение, и изменение угловой
скорости с таким же темпом, как и вызвавшая
рассматриваемый переходный процесс
ЭДС преобразователя (рис.5.24).
(рис. 5.23), что обеспечивает постоянное
угловое ускорение, и изменение угловой
скорости с таким же темпом, как и вызвавшая
рассматриваемый переходный процесс
ЭДС преобразователя (рис.5.24).
М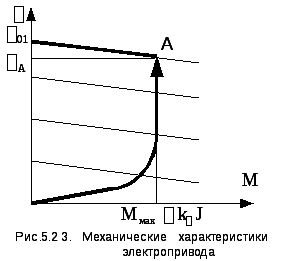 аксимальное
значение момента, равное
аксимальное
значение момента, равное![]() дает возможность
оценить допустимое значение углового
ускорения
дает возможность
оценить допустимое значение углового
ускорения
![]() .
.
На
втором этапе при![]() расчетные
уравнения имеют вид
расчетные
уравнения имеют вид
![]() ;
;
![]() ;
;![]()
Продолжительность
второго этапа
![]() .
.
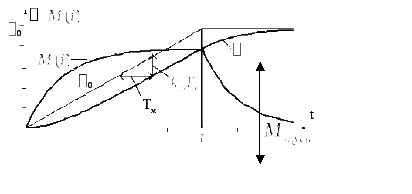
Зависимости
![]() ,
,![]() ,
,![]() представлены на рис. 5.24.
представлены на рис. 5.24.
На
рис. 5.23 утолщенной линией показана
зависимость
![]() в переходном режиме (фазовая, траектория
процесса), отражающая динамическую
механическую характеристику привода.
в переходном режиме (фазовая, траектория
процесса), отражающая динамическую
механическую характеристику привода.
Если
на рис. 5.24 кривую
![]() заменить на кривую
заменить на кривую![]() ,
где
,
где![]() ,
что вполне допустимо при
,
что вполне допустимо при![]() ,
то разница
,
то разница![]() после достижения пускового момента
после достижения пускового момента![]() равна
равна![]() (рис. 5.25)
(рис. 5.25)
|
|
|
|
Рис. 5.25. Графики переходных процессов пуска вхолостую электропривода
|