

Глава 3. Механические характеристики электродвигателей
3.1. Механические характеристики двигателя постоянного тока независимого возбуждения
С хема
включения двигателя постоянного тока
независимого возбуждения представлена
на рис. 3.1. Направления тока
хема
включения двигателя постоянного тока
независимого возбуждения представлена
на рис. 3.1. Направления тока![]() и ЭДС вращения двигателя
и ЭДС вращения двигателя![]() ,
показанные
на рис.
3.1,
соответствуют двигательному режиму
работы, когда электрическая энергия
потребляется двигателем из сети (от
источника напряжения
,
показанные
на рис.
3.1,
соответствуют двигательному режиму
работы, когда электрическая энергия
потребляется двигателем из сети (от
источника напряжения
![]() )
и преобразуется в механическую энергию,
мощность которой равна
)
и преобразуется в механическую энергию,
мощность которой равна
![]() .
.
Аналитическое
выражение механической характеристики
двигателя
![]() в установившемся режиме может быть
получено из следующих уравнений:
в установившемся режиме может быть
получено из следующих уравнений:
|
|
(3.1) |
Решая
уравнения (3.1) относительно скорости
![]() получаем уравненияэлектромеханической
получаем уравненияэлектромеханической
![]() и механической
и механической
![]() характеристик
характеристик
|
|
(3.2) |
|
|
(3.3) |
где
![]() - - суммарное сопротивление якорной
цепи, включающее сопротивление внешнего
резистора
- - суммарное сопротивление якорной
цепи, включающее сопротивление внешнего
резистора
![]() ;
;
![]() -
внутреннее сопротивление якоря двигателя
(при наличии дополнительных полюсов
учитывается и их сопротивление) при
рабочей температуре
-
внутреннее сопротивление якоря двигателя
(при наличии дополнительных полюсов
учитывается и их сопротивление) при
рабочей температуре
![]() ;
;
![]() -
коэффициент, зависящий от конструктивных
данных двигателя,
-
коэффициент, зависящий от конструктивных
данных двигателя,
![]() (
(![]() — число пар полюсов двигателя; N
— число активных проводников обмотки
якоря;
— число пар полюсов двигателя; N
— число активных проводников обмотки
якоря;
![]() — число пар параллельных ветвей обмотки
якоря);
— число пар параллельных ветвей обмотки
якоря);
![]() -
скорость идеального холостого хода
(скорость двигателя при токе
-
скорость идеального холостого хода
(скорость двигателя при токе
![]() )
)
|
|
(3.4) |
![]() -
магнитный поток;
-
магнитный поток;
![]() -
постоянная двигателя при
-
постоянная двигателя при
![]() ;
;
![]() -
статическое падение угловой скорости
(перепад)
относительно угловой скорости идеального
холостого хода
-
статическое падение угловой скорости
(перепад)
относительно угловой скорости идеального
холостого хода
|
|
(3.5) |
Электромеханическая
и механическая характеристики двигателя
при неизменных параметрах
![]() ,
,![]() ,
,![]() представляются прямыми линиями.
представляются прямыми линиями.
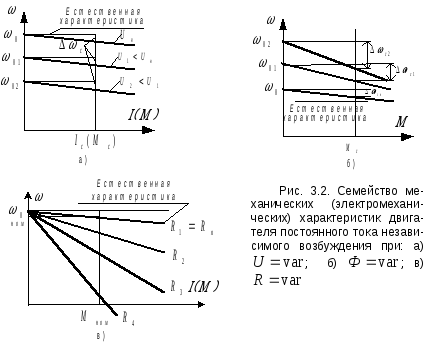
Характеристика, полученная при отсутствии внешних резисторов в якорной цепи и номинальных значениях напряжения и магнитного потока двигателя, носит название естественной.
Из
уравнений (3.4) и (3.5) следует, что скорость
идеального холостого хода зависит от
напряжения на якоре и магнитного потока
и не зависит от дополнительного
сопротивления в цепи якоря
![]() ,
а перепад скорости при постоянном
моменте сопротивления (
,
а перепад скорости при постоянном
моменте сопротивления (![]() )
зависит от дополнительного сопротивления
в цепи якоря
)
зависит от дополнительного сопротивления
в цепи якоря![]() и магнитного потока и не зависит от
напряжения сети.
и магнитного потока и не зависит от
напряжения сети.
На рис. 3.2 приведены механические и электромеханические характеристики двигателя постоянного тока независимого возбуждения при разных значениях якорного напряжения (а), ослабленных магнитных потоках (б), введении в якорную цепь дополнительных сопротивлений (в).
3.2. Механические характеристики двигателя постоянного тока независимого возбуждения
в тормозных режимах
Любая электрическая машина может работать не только в двигательном режиме, преобразуя электрическую энергию в механическую, но и в генераторном (тормозном), преобразуя механическую энергию, поступающую с вала двигателя, в электрическую.
Для электрических двигателей возможны три способа генераторного торможения, а именно:
1) торможение с отдачей энергии в сеть (рекуперативное);
2) динамическое торможение;
3) торможение противовключением.
Рассмотрим особенности механических характеристик при указанных способах торможения.
1.
Торможение
с отдачей энергии в сеть
(генераторный режим работы параллельно
с сетью) осуществляется в том случае,
когда скорость двигателя оказывается
выше скорости идеального холостого
хода и его ЭДС
![]()
![]() больше приложенного напряжения
больше приложенного напряжения![]() .
Двигатель здесь работает в режиме
генератора параллельно с сетью, которой
он отдает электрическую энергию; ток
при этом изменяет свое направление
.
Двигатель здесь работает в режиме
генератора параллельно с сетью, которой
он отдает электрическую энергию; ток
при этом изменяет свое направление
![]() .
.
Такой режим возможен:
- в электроприводе электровоза (трамвая), идущего под уклон ( рис.3.4, а);
- при снижении напряжения на якоре ( рис.3.4,б).

Рис. 3.4. Механические характеристики в режиме рекуперативного торможения, а) при движении под уклон; б) при снижении напряжения
П ри
снижении напряжения на якоре двигателя
скорость идеального холостого хода
скачком снижается с
ри
снижении напряжения на якоре двигателя
скорость идеального холостого хода
скачком снижается с![]() до
до![]() ,
а скорость двигателя за счет инерции
остается равной
,
а скорость двигателя за счет инерции
остается равной![]() ,
которая больше
,
которая больше![]() .
Это означает, что ЭДС двигателя становится
больше якорного напряжения, в результате
чего ток меняет свое направление и
момент, развиваемый двигателем, становится
тормозным.
.
Это означает, что ЭДС двигателя становится
больше якорного напряжения, в результате
чего ток меняет свое направление и
момент, развиваемый двигателем, становится
тормозным.
Такое
торможение является весьма экономичным,
поскольку оно сопровождается отдачей
в сеть электрической энергии (за вычетом
потерь в двигателе), которую двигатель
преобразует из механической, поступающей
к нему с вала. Но торможение этим способом
может быть осуществлено в ограниченных
пределах, так как не во всех приводах
возможно соблюдение условия
![]() .
.
2 .Динамическое
торможение
происходит при отключении якоря двигателя
от сети и замыкании его на резистор
(рис. 3.5). Обмотка возбуждения при этом
должна оставаться присоединенной к
источнику питания. При динамическом
торможении механическая энергия,
поступающая с вала двигателя в виде
кинетической энергии, запасенной в
элементах электропривода, преобразуется
в электрическую и выделяется в виде
теплоты в сопротивлениях якорной цепи.
.Динамическое
торможение
происходит при отключении якоря двигателя
от сети и замыкании его на резистор
(рис. 3.5). Обмотка возбуждения при этом
должна оставаться присоединенной к
источнику питания. При динамическом
торможении механическая энергия,
поступающая с вала двигателя в виде
кинетической энергии, запасенной в
элементах электропривода, преобразуется
в электрическую и выделяется в виде
теплоты в сопротивлениях якорной цепи.
Уравнение механической характеристики двигателя в режиме динамического торможения нетрудно получить из (3.3), приравняв напряжение сети нулю
![]() .
(3.6)
.
(3.6)
Семейство
характеристик при торможении представляет
собой прямые, проходящие через начало
координат (рис. 3.6). Наклон этих прямых
зависит от сопротивления якорной цепи
![]() .
.
Д ля
ограничения тормозных токов до допустимой
величины, определяемой перегрузочной
способностью двигателя
ля
ограничения тормозных токов до допустимой
величины, определяемой перегрузочной
способностью двигателя![]() ,
якорная цепь замыкается на сопротивление,
минимальная величина которого определяется
уравнением
,
якорная цепь замыкается на сопротивление,
минимальная величина которого определяется
уравнением
![]() (3.7)
(3.7)
Динамическое торможение широко используется для останова привода при отключениях его от сети. Оно достаточно экономично, хотя и уступает в этом отношении торможению с отдачей энергии в сеть.
3. Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону.
Э то
может происходить, например, в приводе
подъемника, когда двигатель включен на
подъем, а момент, развиваемый грузом,
заставляет привод вращаться в сторону
спуска груза (рис. 3.7). Механическая
характеристика этом случае является
продолжением характеристики двигательного
режима в области квадранта 4.
то
может происходить, например, в приводе
подъемника, когда двигатель включен на
подъем, а момент, развиваемый грузом,
заставляет привод вращаться в сторону
спуска груза (рис. 3.7). Механическая
характеристика этом случае является
продолжением характеристики двигательного
режима в области квадранта 4.
Режим противовключением получается и при смене полярности напряжения на якоре двигателя. (рис. 3.8). При скорости равной нулю двигатель необходимо отключить от сети, в противном случае возможен его реверс.
Для
ограничения тормозных токов до допустимой
величины, определяемой перегрузочной
способностью двигателя
![]() ,
в якорную цепь необходимо ввести
дополнительное сопротивление не менее
,
в якорную цепь необходимо ввести
дополнительное сопротивление не менее
![]() (3.8)
(3.8)