

4.4.1. Система генератор — двигатель'
П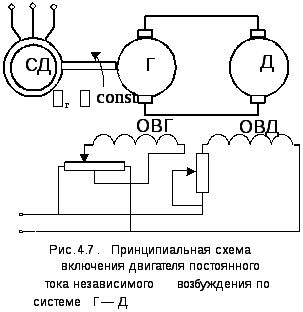 ринципиальная
схема включения двигателя постоянного
тока с независимым возбуждением по
системе Г—Д приведена на рис. 4.7. Генератор
приводится во вращение асинхронным или
синхронным двигателемСД;
питание цепей возбуждения генератора
Г
и исполнительного двигателя Д
осуществляется от независимого источника
постоянного тока.
ринципиальная
схема включения двигателя постоянного
тока с независимым возбуждением по
системе Г—Д приведена на рис. 4.7. Генератор
приводится во вращение асинхронным или
синхронным двигателемСД;
питание цепей возбуждения генератора
Г
и исполнительного двигателя Д
осуществляется от независимого источника
постоянного тока.
ЭДС генератора определяется по формуле
![]() ,
,
где
![]() — коэффициент, зависящий от конструктивных
данных генератора.
— коэффициент, зависящий от конструктивных
данных генератора.
ЭДС генератора определяется магнитным потоком, который регулируется током возбуждения.
Уравнение
электрического равновесия якорной цепи
имеет вид
![]() или
или![]() .
.
Отсюда
угловая скорость двигателя
![]() .
.
Электромеханические и механические характеристики двигателя при неизменном потоке двигателя и изменении потока генератора представляют собой семейство линейных характеристик (рис. 4.8), наклон которых остается постоянным и определяется общим сопротивлением якорной цепи.
Отрицательное значение ЭДС генератора легко может быть получено при реверсировании тока возбуждения изменением полярности напряжения возбуждения генератора.
Механические характеристики двигателя располагаются в четырех квадрантах; основным достоинством этой системы является плавность регулирования, которая осуществляется воздействием на цепь возбуждения.
Система Г—Д может обеспечить двухзонное регулирование угловой скорости: до основной скорости изменением ЭДС генератора при постоянном потоке двигателя, а выше основной - регулированием тока возбуждения двигателя при постоянной ЭДС генератора, равной номинальному значению.
Характеристики, соответствующие первой зоне регулирования, показаны на рис. 4.8 сплошными линиями, а второй зоне —штриховыми.
К недостаткам системы Г—Д относятся:
недостаткам системы Г—Д относятся:
1) необходимость в двукратном преобразовании энергии (из электрической энергии переменного тока в механическую и из механической вновь в электрическую постоянного тока регулируемого напряжения), что приводит к значительному снижению КПД;
2) наличие двух машин в преобразовательном агрегате, установленная мощность каждой, если пренебречь потерями в машинах, равна установленной мощности регулируемого двигателя;
3) значительные габариты и масса установки, необходимость в фундаменте для преобразовательного агрегата;
4) высокие капитальные и эксплуатационные расходы.
4.4.2. Регулирование скорости двигателя постоянного тока по системе тп-д
Принципы работы статических преобразователей, преобразующие переменное напряжение в регулируемое постоянное, и схемные решения подробно рассмотрены в специальных курсах. Поэтому в настоящем параграфе этих вопросов касаться не будем.
Принципиальная схема системы ТП-Д и схема замещения приведены на рис. 4.9. Согласно схеме замещения можно записать уравнение электрического равновесия
![]() или
или
![]() ,
,
где
![]() - ЭДС двигателя;
- ЭДС двигателя;![]() - ЭДС преобразователя;
- ЭДС преобразователя;![]() - среднее значение вып
- среднее значение вып рямленного
напряжения при холостом ходе выпрямителя
и полностью открытых тиристорах;
рямленного
напряжения при холостом ходе выпрямителя
и полностью открытых тиристорах;![]() - действующее
значение переменного фазного напряжения;
т -
число фаз выпрямителя;
- действующее
значение переменного фазного напряжения;
т -
число фаз выпрямителя;
![]() - эквивалентное сопротивление якорной
цепи;
- эквивалентное сопротивление якорной
цепи;![]() - соответственно приведенные к вторичной
обмотке индуктивное сопротивление
обмоток фазы трансформатора и их активное
сопротивление;
- соответственно приведенные к вторичной
обмотке индуктивное сопротивление
обмоток фазы трансформатора и их активное
сопротивление;![]() .
— активное
сопротивление сглаживающего реактора.
.
— активное
сопротивление сглаживающего реактора.
Уравнения электромеханической и механической характеристик двигателя независимого возбуждения, питаемого от тиристоного преобразователя,
![]() ,
,
![]() .
.
Механические характеристики двигателя постоянного тока независимого возбуждения, управляемого тиристорным преобразователем, напоминают характеристики в системе Г—Д (рис. 4.10), однако они отличаются рядом особенностей.
Характеристики
имеют меньшую жесткость за счет большего
падения напряжения в якорной цепи; при
различных углах включения
![]() наклон их остается постоянным. При
конечных значениях индуктивности
сглаживающего реактора и малых нагрузках
наступает режим прерывистых токов, при
котором имеет место резкий подъем
характеристик.
наклон их остается постоянным. При
конечных значениях индуктивности
сглаживающего реактора и малых нагрузках
наступает режим прерывистых токов, при
котором имеет место резкий подъем
характеристик.

В
режиме гранично-непрерывного тока
величина
![]() определяется
уравнением
определяется
уравнением
![]() ,
,
где
![]() - эквивалентная индуктивность якорной
цепи;
- эквивалентная индуктивность якорной
цепи;
![]() -
индуктивность якоря двигателя
-
индуктивность якоря двигателя
![]() ;
;
![]() -
коэффициент, для двигателей с
компенсационной обмоткой
-
коэффициент, для двигателей с
компенсационной обмоткой
![]() ;
для двигателей без компенсационной
обмотки
;
для двигателей без компенсационной
обмотки![]() ;
;
![]() -
число пар полюсов;
-
число пар полюсов;
![]() -
индуктивность фазы приведенного
трансформатора
-
индуктивность фазы приведенного
трансформатора
![]() ;
;
![]() -
частота сети.
-
частота сети.
Скорость идеального холостого хода в прерывистом режиме можно найти по уравнениям:
![]() при
при
![]() ;
;
![]() при
при
![]() ,
,
г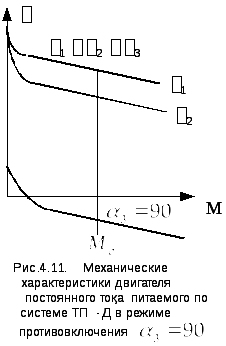 де
де![]() -
линейное напряжение вторичной обмотки
трансформатора.
-
линейное напряжение вторичной обмотки
трансформатора.
В системах ТП-Д с нереверсивными преобразователями двигатель может работать в двигательном режиме и режиме торможения противовключением (за счет активного момента, например, при спуске груза, рис 4.11) при неизменном направлении тока в якорной цепи. Когда возникает необходимость реверсирования двигателя, можно изменять полярность на выводах якоря при неизменном направлении тока возбуждения или применять реверсивные схемы преобразователей.
В схемах электропривода с реверсивными преобразователями двигатель может работать в двигательном режиме и в режиме рекуперативного торможения.
Механические
характеристики системы ТП-Д с реверсивным
преобразователем и согласованным
управлением групп вентилей (![]() ,
где
,
где![]() и
и![]() - углы управления групп вентилей “вперед”
и ”назад”) приведены на рис. 4.12
- углы управления групп вентилей “вперед”
и ”назад”) приведены на рис. 4.12
Коэффициент полезного действия тиристорного преобразователя определяется произведением КПД трансформатора и вентилей. Коэффициент полезного действия трансформатора средней и большой мощности при номинальной нагрузке примерно равен 0,95—0,98. Коэффициент полезного действия тиристорного преобразователя определяется прямым падением напряжения на нем, которое для одного тиристора составляет всего 1,8 — 2,2 В, поэтому общий КПД преобразователя при номинальной нагрузке для мощности 50—100 кВт составляет 0,9—0,92. С увеличением мощности КПД выпрямителя оказывается еще выше.
К оэффициент
мощности тиристорного выпрямителя
определяется по формуле
оэффициент
мощности тиристорного выпрямителя
определяется по формуле
![]() ,
,
откуда
видно, что с увеличением угла регулировния
тиристоров
![]() резко падает коэффициент мощности, что
является существенным недостатком схем
с тиристорным выпрямителем.
резко падает коэффициент мощности, что
является существенным недостатком схем
с тиристорным выпрямителем.
В
системе ТП—Д так же, как и в системе
Г—Д, возможно регулирование угловой
скорости двигателя вверх от основной
(при
![]() )
воздействием на поток двигателя и
регулирование вниз - изменением угла
управления тиристоров при неизменном
магнитном потоке двигателя.
)
воздействием на поток двигателя и
регулирование вниз - изменением угла
управления тиристоров при неизменном
магнитном потоке двигателя.
В разомкнутой системе ТП—Д диапазон регулирования невелик, примерно такой же, как в системе Г—Д.