

Теория электропривода учебное пособие
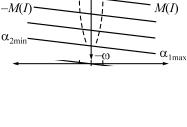
..pdfРис. 4.40. Временные диаграммы преобразователя при изменении угла управления
При уменьшении угла α менее 150° вентили открываются раньше и какую-то часть времени работают при положительной полуволне Uв0, поэтому с уменьшением α происходит уменьшение Uв.с, как это показано, например, на рис. 4.40
при α = 120°.
При α = 150° вентили открыты только при отрицательной полуволне U в0.
Таким образом, при увеличении угла управления среднее значение выпрямленного напряжения растет, вызывая увеличение скорости холостого хода с сохранением жесткости характеристик, которые подобны механическим характеристикам привода по системе Г–Д в генераторном режиме торможения.
Следует отметить, что инвертирование в данном режиме работы преобразователя может происходить, в отличие от выпрямительного, только при принудительном открывании вентилей, а не при естественном.
Если принудительного открывания последующего вентиля не будет (например, за счет пропуска в подаче импульса на открывание вентиля), то ток в работающем (предыдущем) вентиле не прекратится, так как напряжение на его аноде будет возрастать за счет уменьшения мгновенного значения напряжения отрицательной полуволны Uв0. Это очень наглядно видно на рис. 4.40 для α = 150°. Таким образом, протекание
141
тока через предыдущий вентиль не прекратится, он будет продолжать работать и при положительной полуволне Uв0, что приведет к чрезмерному увеличению анодного тока –
копрокидыванию инвертора (показано на рис. 4.35).
Сцелью предотвращения опрокидывания инвертора нельзя устанавливать диапазон углов управления 0–180°, так как открывание вентиля должно быть начато до установления равенства фазных напряжений на запираемом и открываемом вентилях. Кроме того, необходимо учесть явление перекрытия анодов и необходимость времени восстановления запирающих свойств p–n-перехода в тиристоре после прекращения протекания тока через вентиль. Поэтому для нор-
мальной работы инвертора устанавливают αmin = (15…20°)
и αmax = (160…165°) (показано на рис. 4.38).
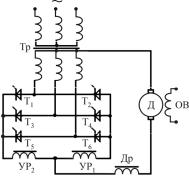
Для получения характеристик двигателя во всех четырех квадрантах применяют, как правило, реверсивные управляемые преобразователи, в которых используются две группы тиристоров, включенных встречно-параллельно. Схема реверсивного электропривода с нулевым тиристорным преобразователем напряжения, состоящего из двух встречно-параллельных
вентильных групп, приведена на рис. 4.41. В нем возможно использование двух принципов управления этими выпрями-
телями: совместного и раздельного.
Совместное управление предусматривает подачу импульсов управления от СИФУ одновременно на тиристоры обоих комплектов – Т1, Т3, Т5 (катодная группа) с углом регу-
142
лирования α1 и Т2, Т4, Т6 (анодная группа) с углом регулирования α2. При этом за счет наличия угла сдвига между импульсами управления тиристорами двух групп, близкого к π, одна из них работает в выпрямительном режиме и ток проводит, а другая – не проводит. Для другого направления вращения режимы работ групп тиристоров меняются, но условие α1 + α2 ≈ π продолжает выполняться.
Мгновенные значения ЭДС выпрямительной и инверторной групп не равны между собой, из-за чего между группами тиристоров протекает уравнительный ток (основной недостаток этого способа), для ограничения которого используются уравнительные реакторы УР1 и УР2.
Полное исключение уравнительных токов между группами тиристоров реверсивного управляемого выпрямителя обеспечивает раздельное управление. В этом случае импульсы подаются только на одну из групп, которая в данный момент проводит ток. На другую группу импульсы не подаются, и она не работает (тиристоры закрыты). Для обеспечения надежности переключения режимов работы тиристорных групп усложняется в данном случае схема переключения и требуется пауза при переключениях якоря. Способ раздельного управления нашел достаточно широкое применение, как наиболее простой.
Механические (электромеханические) характеристики реверсивного тиристорного электропривода, приведенные на рис. 4.42, могут быть представлены как объединение двух комплектов нереверсивных преобразователей.
При формировании механических характеристик в двигательном и генератор-
143

ном режимах работы очень важным является вопрос их сопряжения (при переходе из одного режима в другой не должно быть больших толчков тока).
При правильном сопряжении характеристика инверторного режима должна быть продолжением характеристики двигательного режима (без учета области прерывистых то-
ков) (рис. 4.43).
а |
б |
Рис. 4.43. Согласование двигательного и инверторного участков электромеханических характеристик: а – при раздельном управлении; б – совместном управлении
Это возможно при правильном соотношении углов α1 и α2, вытекающем из условия равенства значений синхронных скоростей при условии отсутствия прерывистых токов:
Uв0 cos α1 −∆Uв =Uв0 cosα2 + ∆Uв,
откуда
cos α −cos α |
2 |
= 2∆Uв . |
(4.61) |
1 |
Uв0 |
|
|
|
|
|
Связь между углами α1 и α2 должна удовлетворять условию (4.61), иллюстрирующему соотношение углов для ли-
нейного согласования при раздельном управлении вентильны-
ми группами. Ограничение токов при переключении режимов вентильных групп в данном случае достигается СИФУ преобразователями.
Разновидностью нулевого реверсивного ТП является широко используемая мостовая схема включения встречнопараллельных вентильных групп, приведенная на рис. 4.44.
144
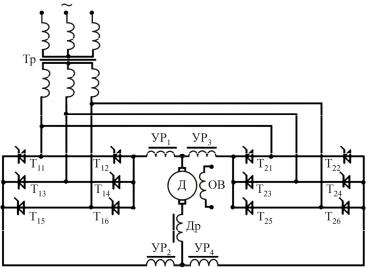
Для снижения пульсаций выпрямленного напряжения и повышения коэффициента использования питающего трансформатора мостовую схему реверсивного ТП выполняют с раздельным питанием встречно-параллельных вентильных групп от отдельных обмоток трансформатора.
Рис. 4.44. Схема реверсивного привода ТП–Д с мостовой схемой включения встречно-параллельных вентильных групп
Получить механические (электромеханические) характеристики в четырех квадрантах можно также и при использовании нереверсивного преобразователя за счет изменения направления тока возбуждения двигателя. Для работы в 3-м и 2-м квадрантах можно использовать нереверсивный преобразователь, коммутируемый в системе подключением якоря двигателя к преобразователю другой полярности с одинаковой характеристикой.
Общий диапазон регулирования скорости в ТП–Д, включая управление с ослаблением поля, не превышает 100:1.
145
5.ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
САСИНХРОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
Асинхронные двигатели получили наибольшее распространение в промышленности благодаря существенным преимуществам по сравнению с другими двигателями:
–простота и надежность в эксплуатации;
–на его изготовление требуется меньше цветных металлов;
–имеет меньшие массу, габариты и стоимость, чем другие типы двигателей той же мощности;
–серийно выпускается в широком диапазоне мощностей;
–высокая надежность, КПД.
К недостаткам можно отнести сложность их регулирования и резкое снижение коэффициента мощности при недогрузке, сравнительно малый диапазон регулирования скорости и перегрев статора и ротора при колебаниях напряжения сети.
Основные отличия асинхронных электродвигателей определяются конструкцией ротора. Наиболее распространенными типами нерегулируемых электроприводов являются электроприводы с короткозамкнутыми асинхронными двигателями, регулируемых – с фазовым ротором. Для нерегулируемых электроприводов характерен пуск электродвигателя прямым включением в сеть с помощью контактной аппаратуры без промежуточных преобразователей электрической энергии.
5.1. Асинхронный двигатель – электромеханический преобразователь энергии
Асинхронный двигатель (АД) является универсальным преобразователем, в котором происходит преобразование напряжения статора U1 в напряжение ротора U2, частоты пита-
146

ния f1 в частоту тока ротора f2, электрической мощности P1, потребляемой из сети, в механическую мощность P2, развиваемую двигателем. Для расчета его характеристик пользуются математической моделью, которая может быть представлена различными схемами замещения. Наиболее простой и удобной для инженерных расчетов является Т-образная схема замещения (рис. 5.1). На рис. 5.2 приведена используемая также на практике упрощенная П-образная схема замещения.
Рис. 5.1. Т-образная схема замещения АД
Принятые на рис. 5.1 обозначения:
U1 – действующее значение фазного напряжения; Iµ, I1 – ток намагничивания и ток обмотки статора;
x – индуктивное сопротивление контура намагничивания;
x1, r1 – индуктивное и активное сопротивления обмотки фазы статора; I2′, r2′, x2′ – приведенные к обмотке статора ток ротора, активное и индуктивное сопротивления фазы ротора;
s – скольжение АД.
Рис. 5.2. П-образная схема замещения АД
147

Приведенный к статору ток ротора
I′ |
= |
I |
2 |
, |
(5.1) |
|
|
|
|
||||
2 |
|
ke2 |
|
m1 |
|
|
|
|
|
|
|
||
|
|
m |
|
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
где I2 – действительный ток ротора;
ke – коэффициент трансформации ЭДС, ke = E1 ;
E2
m1, m2 – число фаз статора и ротора, обычно АД имеют равное число фаз обмоток статора и ротора, тогда
I′ |
= |
I2 |
. |
(5.2) |
|
||||
2 |
|
k 2 |
|
|
|
|
e |
|
|
Приведенные к обмотке статора сопротивления ротора:
r2′= r2 · ke2, x2′= x2 · ke2, |
(5.3) |
где r2, x2 – действительные активное и индуктивное сопротивления фазы роторной цепи, Ом.
Индуктивное сопротивление x1 зависит от индуктивности L1 и частоты напряжения f1:
x1 = 2π · f1 · L1. |
(5.4) |
Коэффициент ke можно определить из паспортных данных двигателя:
ke ≈ 0,95 · |
Uл.н , |
(5.5) |
|
Е2к |
|
где 0,95 – коэффициент, учитывающий 5%-ную потерю напряжения в обмотке статора;
Uл.н – номинальное линейное напряжение статора; Е2к – ЭДС между кольцами неподвижного ротора.
Сопротивления короткого замыкания АД определяются следующим образом:
148
rк = r1 + r1д + r2′ + r2д′; xк = x1 + x1д + x2′ + x2д′, |
(5.6) |
где r1д, r2д′, x1д, x2д′ – дополнительные активное и реактивное сопротивления, включенные в цепь статора и приведенные цепи ротора.
Если обмотки двигателя соединены в треугольник, его заменяют схемой эквивалентной звезды, для которой сопро-
тивления принимаются равными 13 фактических сопротивле-
ний фаз статора и ротора.
Синхронная угловая скорость, рад/c (частота вращения
магнитного поля статора, об/мин), находится как ω0 |
= 2π · |
f1 |
|
|||
p |
||||||
|
|
|
|
|||
или |
|
|
|
|
|
|
n0 = 60 · |
f1 |
, |
(5.7) |
|||
p |
||||||
|
|
|
|
|
||
где f1 – промышленная частота переменного тока, Гц; р – число пар полюсов двигателя.
При питании от сети f1 = 50 Гц синхронная частота вра-
щения может быть 3000, 1500, 1000, 750, 600… об/мин.
Текущее значение угловой скорости ротора ω по отношению к синхронной скорости оценивается скольжением:
s = ω0 −ω. |
(5.8) |
ω |
|
0 |
|
Для двигательного режима s = 1…0. |
|
Мощность на валу двигателя |
|
P2 = M · ω = Pэм · (1 – s). |
(5.9) |
Тепловые потери в цепи ротора пропорциональны |
|
скольжению: |
|
Pэм – P2 = Рэм · s. |
(5.10) |
Максимальное значение КПД двигателя при этом будет
149

η = |
P2 |
= P |
|
1− s |
=1− s. |
(5.11) |
|
P |
P |
||||||
|
эм |
|
|
|
|||
|
эм |
|
|
эм |
|
|
По паспортным данным номинальный ток статора двигателя определяется по формуле
Iн = |
Pн |
· Uл.н · cosϕн · ηн. |
(5.12) |
|
3 |
||||
|
|
|
5.2. Электромеханические свойства асинхронных электродвигателей
Электромеханическая характеристика (ЭМХ) в АД оп-
ределяет зависимость между скоростью вращения ротора ω (или скольжением s) и током статора I1 или током ротора I2′.
Согласно схеме замещения (см. рис. 5.1) естественная ЭМХ АД (без добавочных сопротивлений в цепях статора и ротора) по току ротора I2′ описывается как
I2′ = |
|
|
±U1 |
|
. |
(5.13) |
||
r |
|
r2′ |
2 |
|
||||
|
+ |
+ x2 |
|
|||||
|
|
|||||||
|
|
1 |
|
|
|
к |
|
|
|
|
|
|
s |
|
|
|
|
Ток статора определяется как геометрическая сумма приведенного тока ротора и намагничивающего тока:
I |
= |
(I′)2 |
+ I 2 . |
(5.14) |
1 |
|
2 |
|
|
C учетом основного допущения теории электропривода, что электромагнитный момент равен вращающему моменту на валу, определим электромагнитную мощность всех трех фаз, передаваемую ротору через воздушный зазор:
P = M ω |
= 3 I′2 |
|
r2′ |
. |
(5.15) |
|
|||||
0 |
2 |
|
s |
|
|
|
|
|
|
||
150