

Теория электропривода учебное пособие
..pdfЕсли отпирание тиристора происходит при углах, близ-
ких к αmax, ток i1 в цепи будет протекать (по времени) за точкой б даже при отрицательном анодном напряжении u2
(ωt > π) за счет действия индуктивности Lм в цепи нагрузки
(ЭДС самоиндукции Lм ddti поддерживает положительный
потенциал на аноде). Чем меньше будет угол отпирания α, тем раньше откроется тиристор, будет увеличиваться среднее выпрямленное напряжение и, следовательно, тем больше будет величина анодного тока. При больших значениях анодных токов растет запас энергии в индуктивности нагрузки
|
L i2 |
|
, что обеспечивает большее затягивание этого тока |
|
|
м |
|
||
2 |
||||
|
|
|
в область отрицательных величин u2. Чем больше α, тем больше в сторону отставания смещается кривая анодного тока по отношению к кривой напряжения u2. Поэтому при больших углах отпирания коэффициент мощности (cosϕ) ухудшается (увеличивается угол ϕ, как это показано на рис. 4.34, измеряемый между максимумами кривой напряжения и кривой анодного тока при данном значении α). Таким образом, регулирование выпрямленного напряжения преобразователя (и скорости двигателя) вниз, т.е. в сторону уменьшения, сопровождается ухудшением энергетических параметров ТП.
Это самый крупный недостаток вентильного электропривода.
В инверторном режиме благодаря изменению знака суммы (Uв – Е) открывание тиристора будет возможно при углах от т. а до т. б, как показано на рис. 4.35.
Полученные ранее выражения для αmax , αmin и D распространяются и на инверторный режим работы, так как при отрицательном коэффициенте а угол αmin также отрицате-
131
лен (этот угол откладывается от момента перехода u2 через нуль):
αmin = arcsin а; αmax = π−αmin = π+ |
|
αmin |
|
, |
(4.52) |
||||||||
|
|
||||||||||||
D = αmax −αmin = αmax + |
|
αmin |
|
= π−αmin −αmin , |
|
||||||||
|
|
|
|||||||||||
D = π−2αmin = π+ 2 |
|
αmin |
|
. |
(4.53) |
||||||||
|
|
||||||||||||
Риc. 4.35. Условия открытия тиристора в инверторном режиме
При уменьшении коэффициента а линия аб опускается вниз, диапазон возможных углов открывания вентиля при этом растет. Если а = –1, условия возможного открывания
вентиля будут лишь в одной точке – при αmin = − π2 , по-
скольку точки а и б сливаются, т.е. αmin = − |
π |
, |
αmax = |
3π |
; |
|
2 |
|
|
2 |
|
D = αmax −αmin = 32π + π2 = 2π. Иными словами, наступает ре-
132

жим потери управления, так как через тиристор все время будет протекать ток, а управляющий электрод не может управлять открыванием вентиля.
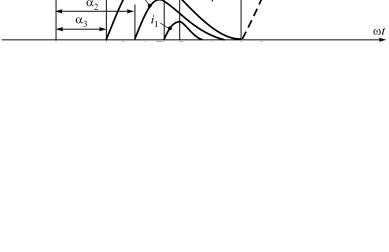
При уменьшении α протекание тока при отрицательной полуволне U2 затягивается, так как увеличивается запас элек-
тромагнитной энергии в индуктивности Lм2i2 . Экстремум то-
ка приближается к экстремуму u2, что свидетельствует об улучшении энергетических показателей (cosϕ) преобразователя при уменьшении угла открывания вентиля. При некотором малом угле α3 волна тока i3 затягивается настолько, что достигает т. в, в которой условия для открывания вентиля такие же, как в т. а. В тиристоре не успевает произойти восстановление запирающих свойств в пограничном слое р–п–р- перехода, как снова создаются условия для протекания тока (на аноде его положительный потенциал). Практически вентиль не закрывается, ток в нем не прекращается, но произойдет как бы мгновенное уменьшение угла отпирания с α3 до αmin, что будет сопровождаться резким скачком анодного тока, превышающим допустимые значения.
В последующие периоды времени анодный ток будет пульсировать с большими амплитудными значениями так на-
зываемого тока опрокидывания, или прорыва инвертора
(iопр). Управляющий электрод уже не может управлять тиристором, поэтому должна сработать максимальная токовая защита
i |
(6...8)I |
. |
опр |
|
н |
Таким образом, в инверторном режиме работы зона управления вентилем Dупр меньше зоны возможного открывания D. Зона Dупр лежит между точками г и б. Точка г соответствует углу открывания αопр, при котором происходит опрокидывание инвертора. Зона между точками а и г называет-
133
ся зоной или диапазоном опрокидывания (Dопр), она увеличи-
вается с уменьшением коэффициента а. Dопр также увеличивается с увеличением Lм в цепи нагрузки, так как растет αопр.
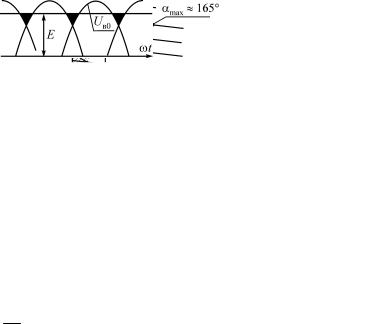
С точки зрения предотвращения опрокидывания инвертора нельзя устанавливать угол α = 180°. Обычно с учетом угла коммутации тиристора, угла восстановления запирающих свойств p–n-перехода и запаса на несимметрию напряжений питания угол не должен быть менее 15° и не должен превышать 165°.
4.5.2.2. Механические характеристики тиристорного электропривода
Принципиальная схема трехфазной нереверсивной схе- |
|
мы с нулевым проводом системы ТП–Д изображена на |
|
рис. 4.36. Трехфазный трансформатор Tр служит для согла- |
|
сования напряжения на якоре двигателя с сетевым напряже- |
|
нием, а также для гальванической развязки цепи якоря элек- |
|
тродвигателя с сетью. Схема содержит тиристоры Т1, Т2, Т3. |
|
Вторичные ЭДС различных фаз трансформатора, поступаю- |
|
щие на тиристоры, сдвинуты на 120°. |
Соответственно, |
и управляющие импульсы, подаваемые |
на управляющие |
электроды тиристоров, сдвинуты на 120° |
2π |
|
. При работе |
|
3 |
|
|
схемы в режиме непрерывного тока ток в каждом из тиристоров протекает в течение 1/3 периода, как показано на рис. 4.37, т.е. в течение 1/3 периода якорь двигателя через один из тиристоров подключается к синусоидальной переменной ЭДС соответствующей фазы. За период изменения напряжения в сети переменного тока якоря двигатель поочередно подключается к трем различным фазам. Регулируя угол α, можно, так же, как и в однофазной схеме, изменять среднее значение напряжения на якоре двигателя.
134

Рис. 4.36. Принципиальная схема |
Рис. 4.37. Среднее значение фаз- |
ТП-Д с нулевым проводом |
ного выпрямленного напряжения |
Среднее выпрямленное напряжение Uв.с на выходе m-фазного выпрямителя на примере ТП при т = 3 (см. рис. 4.37) определяется как отношение заштрихованной площади к ее длительности, т.е. отношение интеграла, вычисленного для кривой выпрямленного напряжения за время
протекания тока через анод, к промежутку времени 2mπ (вре-
мя включения анода при естественной коммутации). Мгновенное значение анодного напряжения u2 = 2U2 sin ωt, если
за начало отсчета времени принять момент, соответствующий началу синусоиды (т.е. момент прохождения синусоиды через ноль). Для удобства вычисления интеграла примем за начало отсчета времени момент прохождения напряжения u2 через максимум, тогда мгновенное значение анодного напряжения будет
|
|
|
u2 = |
|
π |
2U2 cos ωt. |
(4.54) |
||
|
|
|
2U2 sin ωt + |
= |
|||||
|
|
|
|
|
2 |
|
|
|
|
Среднее значение выпрямленного напряжения будет |
|||||||||
|
1 |
|
+π/ m+α |
|
|
m |
|
+π/ m+α |
|
|
|
|
|
|
|
||||
Uв.с = |
|
|
∫ |
2U2 cosωtd(ωt) = |
|
2U2 sin ωt |
−π/ m+α |
= |
|
2π |
|
2π |
|||||||
|
т |
|
−π/ m+α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
135 |

|
m |
|
|
π |
+α− |
π |
|
+α |
|
π |
+α + |
π |
−α |
||
|
|
|
m |
m |
|
m |
m |
||||||||
= |
2U2 2cos |
|
|
|
sin |
|
|
= |
|||||||
2π |
|
2 |
|
|
|
|
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
m |
2U2 cos α sin |
π |
=Uв0 cos α, |
|
(4.55) |
||||||||
|
|
π |
m |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Uв0 – максимальное значение выпрямленного напряжения
(при α = 0).
Напряжение, приложенное к якорю двигателя, будет меньше Uв.с на величину падения напряжения в обмотках анодного трансформатора, в активном сопротивлении Др (если в цепи нагрузки ТП есть сглаживающий реактор), в тиристоре (∆Uв), а также на величину падения напряжения, обусловленного перекрытием анодных токов:
|
|
|
|
U |
дв |
=U |
в.с |
− I |
хтт |
+ r + r −∆U |
в |
, |
(4.56) |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
2π |
т |
р |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где I |
|
хтт |
– падение напряжения, |
вызванное перекрытием |
||||||||||
|
|
|||||||||||||
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
анодных токов; |
|
|
|
|
|
|
|
|
|
|
||||
I |
– среднее значение выпрямленного тока; |
|
||||||||||||
хт |
– индуктивное сопротивление трансформатора, при- |
|||||||||||||
веденное к его вторичной обмотке; |
|
|
|
|
||||||||||
rт |
и |
|
rр – активные сопротивления трансформатора и |
|||||||||||
дросселя; |
|
|
|
|
|
|
|
|
|
|
|
|
||
∆Uв |
– падение напряжения в тиристоре. |
|
|
|
||||||||||
Явление перекрытия токов фаз состоит в том, что поскольку индуктивное сопротивление рассеяния обмоток трансформатора не равно нулю (трансформатор не идеальный), то токи в фазах вторичной обмотки трансформатора не возникают и не исчезают мгновенно. Когда ток начинает проходить через следующую фазу, то ток через предыдущий
136
тиристор еще не успевает исчезнуть, в результате чего некоторое время ток протекает одновременно в двух фазах, что и вызывает дополнительное падение напряжения.
Таким образом, Uв.с на двигателе, питающемся от ТП, т.е. внешняя характеристика преобразователя, запишется следующим образом:
U |
дв |
=U |
в0 |
cos α − I |
|
хтт |
+ r + r |
|
−∆U |
. |
(4.57) |
|
|
|
|||||||||||
|
|
|
|
2π |
т |
р |
в |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку скорость двигателя постоянного тока |
|
||||
ω= |
Ея |
= |
Uдв − IRя |
, |
(4.58) |
kФ |
|
||||
|
|
kФ |
|
||
то, подставляя (4.57) в (4.58), получим выражение для электромеханической характеристики двигателя, получающего питание цепи якоря от ТП:
U |
в0 |
cos α− I |
|
хтт |
+ r + r |
+ R |
|
−∆U |
в |
||||
|
|
||||||||||||
|
|
|
|
2π |
|
т |
р |
я |
|
||||
ω= |
|
|
|
|
|
|
|
|
|
|
|
, (4.59) |
|
|
|
|
|
|
kФ |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
где Rя – сопротивление якорной цепи двигателя. Механическая характеристика вентильного электропри-
вода с учетом (4.59) будет описываться соотношением |
|
|||||||
|
Uв0 cos α−∆Uв |
|
хтт |
+r + r |
+ R |
|
||
|
|
2π |
|
|||||
ω= |
− |
т |
р |
я |
М = ω −∆ω, |
(4.60) |
||
|
|
(kФ)2 |
|
|
||||
|
kФ |
|
0 |
|
||||
где ω0 – скорость идеального холостого хода; |
|
|||||||
∆ω – падение скорости от статической нагрузки, |
опре- |
|||||||
деляющее жесткость механической характеристики ТП.
На рис. 4.38 приведены механические характеристики, которые в линейной части аналогичны характеристикам системы Г–Д, отличие лишь в меньшей жесткости этих механи-
137
ческих характеристик по сравнению с характеристиками системы Г–Д, так как сумма падений напряжения в якорной цепи ТП больше, чем в якорной цепи системы Г–Д.
При токе, уменьшающемся до нуля, уменьшается и падение напряжения в якорной цепи, возрастает выпрямленное напряжение на двигателе и скорость двигателя. Этим объясняется резкое уменьшение жесткости механической характеристики ТП–Д на участке прерывистого тока, что является недостатком такого типа электропривода.
Появление области прерывистых токов понятно из рис. 4.39.
Рис. 4.38. Механические характе- |
Рис. 4.39. Появление зоны |
ристики системы ТП–Д с нереверсив- |
прерывистых токов |
ной схемой |
|
Величина огибающего напряжения в многофазной системе Uв0 меняется по синусоидальному закону, а ЭДС в якорной цепи Е из-за инерции движущихся масс привода за время
2тπ практически не меняется, поэтому разность (Uв0 – Е)
в некоторые интервалы может быть отрицательной и тиристоры не откроются. При больших токах в индуктивности запасается достаточно электромагнитной энергии для поддер-
138

жания тока прежнего направления (т.е. непрерывного тока) даже в моменты, когда Е >Uв0. При этом ток якоря, проте-
кающий через вентиль, поддерживается за счет ЭДС самоиндукции. При том же угле отпирания α, но при малых токах энергии, запасаемой индуктивностями, катодной нагрузки окажется недостаточно для поддержания тока до момента открытия очередного вентиля (в соседней фазе). В этом случае ток упадет до нуля и прервется. Отсюда следует достоинство многофазных схем выпрямителей с точки зрения уменьшения зоны прерывистых токов.
Для уменьшения зоны прерывистого тока в якорную цепь электродвигателя включают дополнительную индуктивность L.
4.5.2.3. Тормозные режимы электропривода по системе ТП–Д
Из-за односторонней проводимости тиристорного преобразователя характеристики, описываемые уравнениями (4.59) и (4.60), существуют лишь в 1-м и 4-м квадрантах.
Увеличение угла открывания тиристоров приводит к снижению среднего значения выпрямленного напряжения на якоре двигателя в соответствии с (4.56), которое при угле
π2 уменьшается до нуля, поскольку в этом
случае ω0 = 0, механическая характеристика соответствует режиму динамического торможения. На рис. 4.38 механические характеристики, расположенные ниже режима динамического торможения, относятся к инверторному режиму.
В п. 4.4.2.1 было показано, что инверторные режимы работы двигателя могут быть получены тогда, когда ЭДС двигателя направлена согласно с проводимостью тиристора и сама может вызвать протекание тока в нем, обеспечивая положительный потенциал на аноде.
139
Переход преобразователя из выпрямительного режима в инверторный можно проиллюстрировать с помощью временных диаграмм.
При переходе в инверторный режим напряжения сети переменного тока и постоянного тока меняются ролями так, что вентили этого не замечают. Полярность напряжения на зажимах преобразователя и направление тока через вентили остаются неизменными. Выпрямитель, переходя в инверторный режим, продолжает выпрямлять напряжение сети переменного тока, но только его отрицательные полуволны.
Если момент сопротивления на валу двигателя является активной нагрузкой, под его действием при увеличении угла открывания тиристоров преобразователь может перейти в инверторный режим работы. Это достигается при увеличении угла управления α > 90°. В инверторном режиме работы электрическая машина постоянного тока становится генератором, а тиристоры открываются при отрицательных значениях напряжения вторичной обмотки трансформатора за счет изменения знака ЭДС двигателя при изменении направления вращения. Ток через тиристоры не меняет своего направления, и электромеханические (механические) характеристики оказываются расположенными в четвертом квадранте. На рис. 4.40 приведены временные диаграммы изменения выпрямленного напряжения преобразователя при различных углах управления (показано штриховкой).
При α = 90° продолжительность работы вентиля при +Uв0 и при –Uв0 одинаковы (по 60°). Поэтому при α = 90° Uв.с = 0, т.е. инверторный режим становится уже невозможен. В этом случае вся ЭДС двигателя компенсируется падениями напряжения на сопротивлениях цепи нагрузки и в самом вентиле. Энергия через трансформатор в сеть не попадает. Это режим динамического торможения.
140