

Теория электропривода учебное пособие
..pdfтелей нормального исполнения превышение U1 на 20–30 % может увеличить Iµ до значений, превышающих I1н, и это может вызвать перегрев двигателя даже при отсутствии полезной нагрузки.
5.3.2.Механические характеристики при введении
вцепь статора добавочных сопротивлений
Добавочные активные или реактивные сопротивления включаются в цепь статора с целью снижения пусковых токов, когда «посадка» напряжения сети при пуске двигателя превышает допустимое значение. При этом следует иметь в виду, что добавочное сопротивление в цепи статора r1д увеличит падение напряжения и снизит напряжение на обмотке, что приведет к изменению характеристики АД аналогично рассмотренному в п. 5.3.1.
Как следует из уравнений критических скольжения и момента, введение добавочных сопротивлений в цепь ста-
тора однозначно влияет на их значения, так как sк ≡ |
1 |
≡ |
1 |
|||||
r |
x |
|||||||
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
1 |
|
и Мк ≡ |
1 |
≡ |
1 |
. |
|
|
|
|
r |
|
|
|
|
||||
|
|
x |
|
|
|
|||
|
1 |
|
1 |
|
|
|
|
|
Добавочные сопротивления рассчитывают из условия кратности снижения пусковых токов по значениям полных сопротивлений статорной цепи z1:
Iп.е |
= |
z1и |
= а, |
(5.32) |
|
|
z |
||||
I |
п.и |
|
|
|
|
|
|
1е |
|
|
|
где а – кратность снижения пускового тока, а = 2…4.
При пуске асинхронных двигателей мощностью до 50 кВт рекомендуется вводить активные сопротивления, так как с увеличением пусковых токов растут тепловые потери,
вто же время дополнительные реактивные сопротивления
вцепи статора снижают cosϕ.
161
5.3.3.Механические характеристики при введении
вцепь ротора добавочных сопротивлений
Как и в электроприводе постоянного тока, простейшим способом регулирования является включение в каждую фазу ротора одинаковых сопротивлений rд. Тогда общее активное сопротивление фазы ротора составит r2 = rр + rд, а искусственные характеристики приобретут вид, представленный на рис. 5.6, где критический момент Мк и предельное значение тока ротора I2′пред в соответствии с (5.18) и (5.27) не изменя-
ются, а sк в соответствии с (5.17) растет пропорционально r2. Для механических характеристик отношение критических скольжений будет
sк.и |
= |
r2′ +rд′ |
= |
r2 + rд |
. |
(5.33) |
s |
r′ |
|
||||
|
|
r |
|
|||
к.е |
2 |
2 |
|
|
||
Рис. 5.6. Механические характеристики АД с активными сопротивлениями в цепи ротора
Последнее соотношение для критического скольжения, очевидно, выполняется и для скольжения при любом М = = const, оно похоже на (3.16), а реостатные механические ха-
162
рактеристики похожи на таковые для двигателя постоянного тока.
Включение активных добавочных сопротивлений в цепь ротора АД используется для ступенчатого пуска электропри-
вода, а иногда даже для параметрического регулирования скорости АД малой мощности.
Рабочий участок механических характеристик для расчета пусковых сопротивлений может быть линеаризован, по-
скольку |
sк |
|
s |
. Тогда упрощенное уравнение Клосса будет |
|||
s |
|
s |
|||||
|
|
|
|
|
|
||
|
|
|
к |
|
|
|
|
иметь вид |
|
|
|
2Мк |
|
|
|
|
|
|
|
М = |
s. |
(5.34) |
|
|
|
|
|
|
|||
|
|
|
|
|
s |
|
|
|
|
|
|
|
к |
|
|
Поскольку критическое скольжение растет пропорционально активному сопротивлению роторной цепи, уравнение (5.34) в общем виде будет
М = A |
|
s |
|
|
|
. |
(5.35) |
||
r + r |
||||
2 |
д |
|
||
Это соотношение лежит в основе графического и аналитического методов расчета пусковых сопротивлений в цепи ротора асинхронного двигателя, как и для ДПТ НВ.
Линеаризованными характеристиками АД можно пользоваться в пределах изменения моментов до 0,85Мк.
Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором практически те же, что у электропривода постоянного тока:
–регулирование скорости осуществляется вниз от номинальной скорости (однозонное);
–жесткость характеристик мала, что не обеспечивает большой диапазон регулирования;
–значительные потери энергии в роторной цепи (в роторе и дополнительном сопротивлении), пропорциональные скольжению.
163

Для получения плавного режима пуска, когда нежелательно использование многочисленных ступеней сопротивления в роторе, в цепь ротора включают индуктивные сопротивления (реакторы) в сочетании с активными сопротивлениями. Наиболее благоприятные характеристики можно получить при параллельном включении rд и xр.
В этом случае (при больших скольжениях) в первый период пуска индуктивность реактора xp велика, ток в роторе ограничивается активным добавочным сопротивлением rд. По мере разгона двигателя происходит перераспределение токов в индуктивности и активном сопротивлении. Это позволяет в течение большого периода пуска сохранять практически постоянным значение пускового момента. В конце пуска АД переходит работать на естественную механическую характеристику.
Применение таких схем включения сопротивлений в роторе целесообразно для АД большой мощности, работающих в тяжелых эксплуатационных условиях с большим числом пусков в час, когда применение сложной пусковой аппаратуры снижает надежность электропривода.
5.4. Электромеханические свойства частотно-управляемого асинхронного электропривода
Изменение частоты напряжения питания асинхронного двигателя приводит к изменениям:
1. Синхронной скорости вращения (частоты вращения магнитного поля статора)
ω0 = 2 · π · fp1 ≡ f1.
2. Реактивного сопротивления короткого замыкания xк = (x1 + х2′ ) = 2 · p · f1 · Lк ≡ f1,
где Lк – индуктивность обмоток двигателя.
164

3. Критического момента из-за изменения реактивного сопротивления (сопротивление короткого замыкания) двигателя
Мк |
|
|
3 U12 |
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
≡ |
|
|
|
≡ |
|
|
. |
|
||
2 |
ω0 |
|
|
2 |
|
2 |
|
ω x |
|
f 2 |
|
|||||||||
|
r1 |
± r1 |
+ xк |
|
0 |
|
к |
|
|
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. Критического скольжения, поскольку r1 << xк, можно |
||||||||||||||||||||
записать |
|
|
r2′ |
|
|
|
|
|
|
r2′ |
|
|
|
|
|
|
|
|
||
sк |
= ± |
|
|
≈ |
|
|
|
≡ |
|
1 |
|
. |
|
|
||||||
r2 |
+ x2 |
|
|
|
2 p |
f1 Lк |
|
f1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
1 |
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При изменении частоты произведение ω0 sк |
оказывает- |
|||||||||||||||||||
ся неизменным: |
ω s = ω |
ω0 −ωк = ∆ω = const, |
что позво- |
|||||||||||||||||
|
|
0 |
к |
0 |
|
|
|
ω |
|
|
к |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
ляет просто строить механические характеристики, вычисляя по заданному значению fi синхронную скорость ω0i, критическое скольжение sкi, критический момент Mкi по параметрам естественной характеристики как
ω |
= ω |
fi |
, |
ω |
= ω |
+ ∆ω , |
M |
|
= M |
|
|
|
fн |
2 |
. (5.36) |
|
кi |
к.н |
|
|
|
||||||||||
0i |
н |
fн |
|
кi |
0i |
к |
|
|
|
fi |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
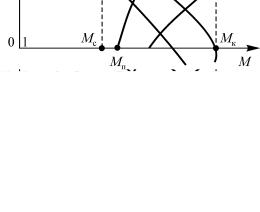
На рис. 5.7 приведены механические характеристики АД при изменении частоты в сторону понижения и повышения от номинального значения.
При изменении частоты напряжения сети пропорционально меняется скорость двигателя, критический момент АД меняется при этом обратно пропорционально квадрату частоты. Если снизить частоту в два раза, то критический момент возрастет в четыре раза. В действительности при снижении частоты во столько же раз снизится ЭДС статора. Создаваемая ЭДС должна уравновесить приложенное напряжение, которое осталось неизменным. Однако увеличить магнитный поток для создания Е1 ≈ U1 невозможно из-за
165
насыщения магнитной системы. Это приводит к увеличению намагничивающего тока и вызывает снижение энергетических показателей двигателя (cosϕ и η), перегрев двигателя.
Рис. 5.7. Механические характеристики при изменении частоты
В связи с этим при регулировании частоты необходимо регулировать и величину напряжения питания для согласования механических характеристик двигателя и рабочего механизма по перегрузочной способности, энергетическим показателям.
По характеру зависимости момента механизма от его скорости в п. 2 были рассмотрены механические характеристики производственных механизмов:
–не зависящая от угловой скорости Mc = const (Pc = k · ω);
–нелинейно-спадающая механическая характеристика
(работа с постоянной мощностью) Mc = k · ω–1 (Pc = const);
– нелинейно-возрастающая механическая характеристика (вентиляторная нагрузка) Mc = k · ω2 (Pc = k · ω2).
Законы управления, связывающие напряжение, частоту и характер нагрузки, определяются формулой М.П. Костенко,
166

полученной из условия постоянства перегрузочной способности двигателя при изменении электромагнитного момента по вышеуказанным законам [6]:
U |
i |
= U |
н |
|
fi |
|
Мс |
, |
(5.37) |
|
Мн |
||||||||
|
|
|
fн |
|
|
||||
где Ui – напряжение на выходе преобразователя частоты; Uн – номинальное напряжение питающей сети;
Mc – статический момент на валу асинхронного двигателя при данной частоте fi.
Управление напряжением и частотой тока АД электропривода с различными моментами сопротивления должно осуществляться по следующим законам:
– при постоянном моменте сопротивления
|
Ui |
= const; |
(5.38) |
|
fi |
|
|
– при нелинейно-спадающей нагрузке |
|
||
|
Ui2 |
= const; |
(5.39) |
|
fi |
||
|
|
|
|
– при вентиляторной нагрузке |
|
||
|
Ui |
= const. |
(5.40) |
|
f 2 |
|
|
|
i |
|
|
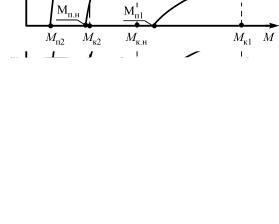
На рис. 5.8 приведены виды механических характеристик АД при изменении питания напряжения и частоты для реализации законов управления по (5.38)–(5.40).
Перечисленные режимы управления достаточны для большинства механизмов. Однако отношение моментов по (5.36) справедливо только в первом приближении, когда активным сопротивлением статора r1 можно пренебречь. Поскольку при малых значениях частоты ( fi ≤ 0,5 · fн) существенно снижается величина напряжения, прикладываемого
167

к контуру намагничивания, из-за увеличения падения напряжения на сопротивлении r1, и значения критических моментов уменьшаются.
При частотном регулировании скорости асинхронного двигателя необходимо учитывать зависимость реактивных сопротивлений двигателя от частоты питающего напряжения.
а |
б |
в |
Рис. 5.8. Механические характеристики системы ПЧ–АД:
а – при Мс = const; б – Рс = const; в – Мс = k · ω2
Электромеханические характеристики, соответствующие уравнению (5.42), для трех законов регулирования приведены на рис. 5.9.
а |
б |
в |
Рис. 5.9. Электромеханические характеристики системы ПЧ–АД:
а – при Мс = const; б – Рс = const; в – Мс = k · ω2
Поскольку при снижении частоты fi активное сопротивление оказывается соизмеримым с реактивными, расчет элек-
168
тромеханических характеристик АД можно выполнить по уравнению
I2′ = |
|
|
|
|
|
|
Ui |
|
|
|
|
, |
(5.41) |
|
|
|
|
|
|
|
|
|
|
||||
|
r |
|
r′ |
|
2 |
|
|
r r′ |
|
2 |
|
||
|
+ |
2 |
+ x2 |
f *2 |
+ |
1 2 |
|
|
|
||||
|
|
|
|
|
|||||||||
|
|
1 |
s |
к.н |
|
|
|
* |
|
||||
|
|
|
|
|
|
|
s x f |
|
|
|
|||
где Ui – фазное напряжение обмоток статора; |
|
|
f * – относительная частота напряжения, f * = |
fi |
. |
|
||
|
fн |
|
Ток статора I1 можно найти через приведенный ток ротора I2′ и ток намагничивания Iµ по (5.14) и (5.29), в которых
sinϕ определяется как
sin ϕ = |
|
|
x |
|
|
f * |
|
|
|
|
|
к |
|
|
|
. |
(5.42) |
||
r + |
r2′ |
2 |
|
|
|||||
|
+ x2 |
f *2 |
|
||||||
|
|
||||||||
|
|
1 |
s |
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
||
В итоге можно привести особенности частотного управления асинхронным двигателем:
1. Регулирование двухзонное – ниже синхронной скорости изменением соотношения напряжения и его частоты, выше синхронной скорости увеличением частоты при неизменном напряжении.
2. Достаточно высокий диапазон регулирования скоро-
сти (8…10):1.
4. Экономичность в регулировании – нет дополнительных элементов, рассеивающих энергию.
5. Требуется преобразователь частоты (ПЧ), управляющий частотой и амплитудой выходного напряжения.
5.5. Регулирование скорости АД изменением числа пар полюсов
Для ступенчатого регулирования частоты вращения осуществляется изменение числа пар полюсов статорной обмотки при неизменных параметрах питающей сети.
169

На практике наибольшее применение получили схемы переключения числа пар полюсов со «звезды» на «двойную звезду» (рис. 5.10, а), или с «треугольника» на «двойную звезду» (рис. 5.10, б), при этом питание к обмотке статора подается на зажимы A′, B′, C′, а зажимы A, B, C закорачиваются (показано пунктиром). Число пар полюсов p в обоих случаях уменьшается вдвое, что вызывает повышение скоро-
сти магнитного поля также вдвое: ω0 = 2 · π · fp1 .
аб
Рис. 5.10. Схемы переключения обмоток статора: а – «звезда» – «двойная звезда»; б – «треугольник» – «двойная звезда»
Изменение числа пар полюсов происходит путем переключения полуобмоток с последовательного соединения на параллельное, как показано на рис. 5.11.
Рис. 5.11. Схемы переключения полуобмоток АД
Как видно из рис. 5.11, такое переключение приводит к уменьшению числа полюсов вдвое и, тем самым, к увеличению синхронной скорости. Момент, развиваемый двигате-
170