

Теория электропривода учебное пособие
..pdfУгловая характеристика явнополюсного СД показана на рис. 6.8, где видно, что реактивный момент увеличивает крутизну рабочего участка угловой характеристики.
В номинальном режиме работы, когда двигатель развивает номинальный электромагнитный момент Мном, значение угла θэл.ном составляет 20–30°.
6.3. Пуск синхронных двигателей
Пуск синхронной машины осуществляется без питания обмотки возбуждения ротора методом асинхронного пуска за счет пусковой короткозамкнутой обмотки. При достижении так называемой подсинхронной скорости ωпс = 0,95ω0 (см. рис. 6.2) в обмотку возбуждения ротора подают напряжение – и синхронная машина втягивается в синхронизм, т.е. выходит на номинальную синхронную частоту вращения, и ток в короткозамкнутой обмотке исчезает. Момент, развиваемый СД при подсинхронной скорости (рис. 6.2), называ-
ется входным моментом (Мвх).
Как видно из рис. 6.2, при различном сопротивлении короткозамкнутой пусковой обмотки СД меняется жесткость механических асинхронных характеристик, при этом меняются значения входных (Мвх) и пусковых (Мп) моментов СД.
Значения Мвх и Мп СД задаются в каталогах на эти машины, так как они влияют на пуск при различных моментах статической нагрузки Мс. При выборе двигателя для обеспечения асинхронного пуска и вхождения двигателя в синхронизм необходимо выполнение соотношения моментов Мп > Мвх > Мс, иначе возможен аварийный режим.
Например, как показано на рис. 6.2, если двигатель имеет пусковую характеристику 1 (по которой Мп1 > Мс1), то разгон СД произойдет до скорости ωс1. При этом ω < ωпс, двигатель не втянется в синхронизм, а будет продолжать работать в асинхронном режиме. Если не отключить СД, то длитель-
201
ный асинхронный режим разогреет короткозамкнутую обмотку, рассчитанную лишь для работы в ограниченное время пуска, и выведет СД из строя.
Принципиально на процесс вхождения в синхронизм влияет момент подключения напряжения к обмотке возбуждения. Однако в большинстве практических случаев схема управления не усложняется путем введения устройств, обеспечивающих включение возбуждения в наиболее благоприятный момент времени. Важно, чтобы обмотка возбуждения не была разомкнутой. Если при пуске оставить низковольтную обмотку ротора разомкнутой, она может быть выведена из строя в начальный момент недопустимо высоким напряжением.
В то же время ее нельзя замыкать накоротко, так как двигатель может оказаться в режиме одноосного включения. Если при пуске СД обмотку ротора замкнуть накоротко, в ней наводится однофазная ЭДС с частотой скольжения и возникает однофазное поле, вращающееся относительно ротора со скоростью ω2 = ω0 · s. Это поле можно разложить на поля прямой и обратной последовательности, вращающиеся соответственно со скоростями ωп.п = ωрот + ω2 = ω0 · (1 – s) + + ω0 · s = ω0 и ωо.п = ωрот – ω2 = ω0 · (1 – s) – ω0 · s = ω0 · (1 – 2s).
На рис. 6.9 показаны моменты, развиваемые полями прямой Мп.п и обратной Мо.п последовательности и момент Мп.о, развиваемый пусковой обмоткой.
Результирующий момент Мрез имеет провал в механической характеристике, и двигатель «застревает» в точке ‘*’. Для исключения этого эффекта обмотку ротора при пуске подключают на разрядное сопротивление Rр ≈ 10rо.в.
В зависимости от мощности питающей сети применяются пуски СД при полном и пониженном напряжениях. В большинстве случаев синхронный двигатель мощностью до нескольких сотен киловатт пускают прямым включением
202

в сеть с наглухо подключенным к якорю возбудителем или через разрядное сопротивление. Кратность пускового тока при прямом пуске kI =
= Iп = 4…5.
I1н
При пуске синхронных двигателей мощностью несколько мегаватт возникает необходимость ограничения пусковых токов. Из извест-
ных способов ограничения пускового тока асинхронных двигателей возможны три способа токоограничения при асинхронном пуске синхронного двигателя:
1)введение на время пуска добавочного активного сопротивления в цепи обмоток статора;
2)введение на время пуска добавочного реактивного сопротивления в цепи обмоток статора;
3)уменьшение на время пуска фазного напряжения обмоток статора с помощью автотрансформатора.
Различают легкий и тяжелый пуск синхронного двигателя. При легком пуске на обмотку статора подается пониженное напряжение для ограничения пускового тока, возбуждение на обмотку ротора подается при пониженном напряжении на статоре. Данный способ применяется при малых статических нагрузках и малых моментах инерции электропривода. При тяжелом пуске на обмотку статора сначала подается пониженное напряжение для ограничения пусковых токов, затем полное напряжение. Напряжение на обмотку возбуждения подается при полном напряжении на обмотке статора. Тяжелый пуск осуществляется при относительно больших моментах инерции электропривода и момен-
203

тах сопротивления, из-за чего пуск осуществляется за значительное время и осложняется вхождение двигателя в синхронизм.
Практически все современные электроприводы с СД оборудованы тиристорными возбудителями взамен электромашинных, которые позволяют сравнительно просто коммутировать разрядное сопротивление на период пуска. На рис. 6.10 приведен вариант тиристорного возбудителя синхронного двигателя [6].
При пуске в асинхронном режиме импульсы управления на тиристоры управляемого выпрямителя не подаются и напряжение на его выходе равно нулю. В обмотке возбуждения СД от индуктируемой в обмотке возбуждения переменной ЭДС скольжения через стабилитроны Д1, Д2 и Д3, Д4 открываются вспомогательные тиристоры Т1 и Т2, и обмотка возбуждения синхронного двигателя закорачивается на разрядное сопротивление Rр.
Рис. 6.10. Схема тиристорного возбуждения СД
Когда двигатель достигает скорости близкой к подсинхронной, ЭДС скольжения уменьшается, уменьшается и напряжение на управляющих электродах тиристоров Т1 и Т2,
204
и они перестают включаться. Разрядное сопротивление отключается от обмотки возбуждения. После чего в обмотку возбуждения подается постоянный ток от управляемого выпрямителя, питающегося от трансформатора.
6.4. Тормозные режимы СД
Синхронный двигатель, как обратимая электрическая машина, при Мс < 0 переходит в генераторный режим. При этом ротор двигателя опережает магнитное поле статора на угол θ, механическая характеристика является продолжением характеристики двигателя во второй квадрант. Этот способ применяется в электроприводе по системе Г–Д, где СД является приводным двигателем генераторов электромашинного агрегата, и при переходе приводимого им генератора в двигательный режим переходит в генераторный режим торможения.
При необходимости торможения двигателя с целью останова привода применяют динамическое торможение, когда обмотка статора отключается от сети и подключается к добавочным сопротивлениям. Вращающимся магнитным потоком ротора в обмотке статора наводится ЭДС, и взаимодействие вызываемого этой ЭДС тока статора с полем ротора создает тормозной момент. Наиболее предпочтительным является способ возбуждения при динамическом торможении от независимого источника с Iв = const, обеспечивающий наибольшую жесткость механической характеристики.
Возможен для СД также и режим торможения противовключением, однако он практически не применяется в связи с малыми тормозными моментами и значительными «толчками» тока.
Синхронный двигатель при подаче на статорные обмотки постоянного напряжения (f1 = 0) создает тормозной момент при неподвижном роторе, обеспечивая режим механической фиксации ротора в заданном положении.
205
6.5. Регулирование скорости синхронных двигателей
Угловая скорость вращения СД в пределах максимального значения момента зависит только от частоты питающего
напряжения и числа пар полюсов ω0 = 2π f1 . p
Поскольку у серийных двигателей изменение числа пар полюсов не применяется, частотное регулирование является практически единственным способом регулирования скорости СД.
Способ характеризуется теми же показателями, что и при частотном регулировании асинхронных двигателей с короткозамкнутым ротором. Диапазон регулирования вниз от номинальной скорости может достигать значений D = = 1:100. Допустимая нагрузка при постоянном возбуждении соответствует номинальному значению момента.
Пренебрегая составляющей реактивного момента в (6.21), принимаем
M = A |
U1 Iвj |
sin θ , |
(6.22) |
f1 j эл
где А – коэффициент;
j – значения регулируемых параметров.
Для сохранения запаса устойчивости двигателя при регулировании скорости двигателя его запас устойчивости не должен изменяться, т.е. при всех режимах электрический угол должен оставаться неизменным, как при номинальном режиме: θэлj = θэл.н. Тогда из (6.22) с учетом этого равенства получим соотношение
М f1 j |
= |
|
M |
н |
f |
|
|
|
|
|
1н |
. |
(6.23) |
||
U1 j Iвj |
|
|
|
|
|||
|
U1н Iв.н |
|
|||||
В соответствии с (6.23) применяются законы частотного регулирования скорости СД при номинальном возбуждении Iв = Iв.н = const, аналогичные законам частотного регулирова-
206

ния скорости асинхронных электродвигателей с короткозамкнутым ротором:
– U1 j = const, при постоянном моменте сопротивления f1 j
(Мс = const); |
|
|
|||||
– |
U1 j |
|
= const, |
при постоянной мощности (Pc |
= M · ω) |
||
f |
|
||||||
|
|
|
|
|
|||
|
1 j |
|
|
||||
вниз от номинальной скорости ω0н; |
|
||||||
– |
U1 j |
|
= const, |
при вентиляторной нагрузке |
(Мс = |
||
f 2 |
|||||||
|
|
|
|
|
|||
|
1 j |
|
|
|
|
||
= М0 + k · ω2).
Кроме того, возможно применение частотного регулирования вверх от номинальной скорости при номинальном напряжении питания статора U1j = U1н = const. Поскольку при этом значение максимального момента двигателя снижается, регулирование скорости применяется для механизмов с не- линейно-спадающей механической характеристикой, т.е. с постоянной мощностью.
6.6. Синхронный двигатель – компенсатор реактивной мощности
Синхронная машина имеет характерную зависимость тока статора I1 от тока возбуждения Iв – так называемые V-об- разные кривые (рис. 6.11). Их форма связана с тем, что при изменении тока возбуждения меняются реактивная составляющая тока статора и ее знак, т.е. синхронный двигатель может отдавать реактивную энергию в сеть.
Влияние возбуждения дви- |
Рис. 6.11. V-образные |
|
кривые СД |
||
гателя на условия преобразова- |
||
|
||
|
207 |
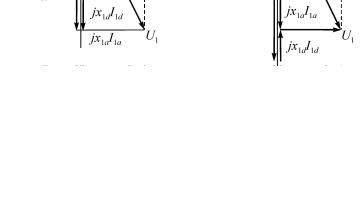
ния энергии можно проанализировать с помощью векторных диаграмм, соответствующих уравнениям (6.20) при θэл = const, представленных на рис. 6.12 в осях d–q обобщенной машины [1].
а |
б |
Рис. 6.12. Векторные диаграммы: а – с отстающим;
б– опережающим cosϕ
В(6.20) ток I1d и его знак определяются током возбуждения Iв, которому пропорциональна при принятых допущениях ЭДС Еm, а I1q не зависит от возбуждения. При относительно небольшом токе возбуждения, как показано на
векторной диаграмме, E < U1 · cosθэл и ток I1d направлен в отрицательную сторону оси d (рис. 6.12, a), при этом ток статора I1 отстает от приложенного напряжения на угол ϕ1 и из сети потребляется реактивная мощность. Это потребление тем больше, чем меньше ток возбуждения. Увеличивая ток возбуждения, можно изменить направление тока I1d и установить такое его значение, при котором вектор тока статора I1 опережает по направлению напряжение сети (рис. 6.12, б) и двигатель потребляет из сети только активную мощность, работая с опережающим cosϕ1 и отдачей реактивной мощности в сеть.
208
Из сравнения векторных диаграмм на рис. 6.12 можно заключить, что при θэл = const увеличение тока возбуждения и ЭДС E вызывает увеличение активной составляющей тока I1, рост активной мощности, а следовательно, и момента двигателя. При неизменном моменте двигателя увеличение тока возбуждения приводит к уменьшению угла θэл, а работа при ϕ1 = 0 соответствует минимальному току статора I1 потребляемому двигателем при этом моменте, как показано на V-образных кривых (см. рис. 6.11). Как следует из (6.21), увеличение тока возбуждения Iв и тем самым ЭДС Е приводит к увеличению перегрузочной способности синхронного двигателя. Поэтому форсирование возбуждения при пиках нагрузки на практике используется для повышения устойчивости работы двигателя в этих режимах.
6.7. Шаговый режим работы синхронного электродвигателя
Особое место в ряду множества новых электроприводов занимает шаговый электропривод, осуществляющий преобразование электрического сигнала (кода, цифры) в угловое или линейное перемещение, а также силовая версия синхронной машины – вентильно-индукторный электропривод (ВИМ). Действие ВИМ основано на взамимодействии ферромагнитного тела с высокой коэрцитивной силой с возбужденным электромагнитом (статора – индуктора). По своему устройству ВИМ представляют сочетание синхронной машины (СМ), датчика положения ротора (Д), закрепленного на валу ВИМ, и электронного коммутатора (К), выполняющего роль коллектора машины постоянного тока.
Относительно начального положения ротора при открытии ключей Т1, Т4, Т5 на рис. 6.13 стрелками показано формирование магнитного потока индуктора суммарным воздействием приложенных напряжений к обмоткам индуктора
209
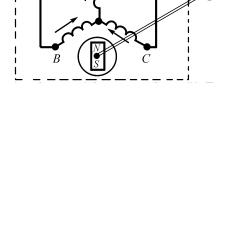
(так как одна обмотка оказывается подключенной к 1/3, а две другие – к 2/3 сетевого напряжения). При изменении открытия транзисторов от СУ, например на Т2, Т3, Т5, результирующий поток повернется на угол 60° по часовой стрелке. Повторение переключений системой управления от положения датчика положения ротора приводит к непрерывному вращению ротора со скоростью, определяемой частотой переключений.
Рис. 6.13. Функциональная схема простейшей ВИМ
В шаговом режиме на практике системой управления формируются различные законы управления, позволяющие дроблением шага на мелкие дискреты увеличивать точность управления движением электропривода.
При постоянной частоте переключений транзисторов статическая механическая характеристика двигателя подобна характеристике СД при питании от сети переменного тока. Отличием шагового режима является лишь дискретный характер вращения вектора поля статора.
210