

Теория электропривода учебное пособие
..pdfили Ф двух машин приводят к изменению жесткости их механических характеристик и, как следствие, к неравномерности распределения нагрузок. Определить эту неравномерность можно по так называемой совместной механической характеристике электрических машин, связанных между собой общим валом. Совместная механическая характеристика строится по суммам моментов каждой из машин при одной и той же скорости.
При расчете установившихся режимов работы двухдвигательного электропривода необходимо определять неравномерность распределения нагрузки и принимать меры для избежания негативных последствий этого явления (например, возможного перегрева одной из машин).
8.2.1. Электромеханические свойства двухдвигательного электропривода с ДПТ при различных способах включения
В двухдвигательном электроприводе постоянного тока можно использовать различные типы электрических машин при параллельном или последовательном включении их якорей, жестко связанных с рабочей машиной. Рассмотрим более подробно распределение нагрузок в этих случаях.
Параллельное включение двигателей. На рис. 8.3 показа-
ны механические характеристики двигателей постоянного тока с независимым и последовательным возбуждением для случая, когда Ф1 = Ф2 и R1 > R2, а также совместная механическая характеристика двухдвигательного электропривода.
Из характеристик (рис. 8.3) видно, что большую нагрузку берет на себя та из машин, которая имеет меньшее сопротивление цепи якоря, т.е. машина с более жесткой механической характеристикой.
Для выравнивания нагрузок у ДПТ НВ (рис. 8.3, а) необходимо уменьшать жесткость механической характеристи-
251
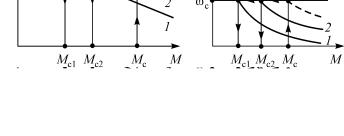
ки машины 1, что невозможно, так как нельзя уменьшить сопротивление якоря. Поэтому практическое решение – увеличение сопротивления цепи якоря машины 2 за счет введения добавочного сопротивления. Такой способ выравнивания нагрузок приводит к увеличению потерь в якорной цепи.
аб
Рис. 8.3. Механические характеристики двухдвигательного электропривода при Ф1 = Ф2 и R1 > R2: а – с ДПТ НВ; б – с ДПТ ПВ
При неравенстве сопротивления цепей якоря у ДПТ ПВ (рис. 8.3, б) неравномерность распределения нагрузок меньше из-за мягкости механических характеристик этих машин. Поэтому для ДПТ ПВ способ выравнивания нагрузок путем введения добавочного сопротивления в цепь якоря более нагруженной машины менее чувствителен и на практике не проводится.
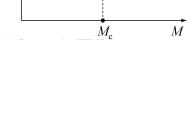
Рассмотрим теперь распределение нагрузок между двумя двигателями с независимым возбуждением при R1 = R2 и Ф1 > Ф2. В этом случае неравномерность распределения нагрузок может быть столь велика, что одна из машин будет работать в генераторном режиме, нагружая (вместе с рабочей машиной) второй двигатель. Этот случай неравномерного распределения нагрузок хорошо виден на рис. 8.4, а. Выравнивание нагрузок обеспечивается ослаблением магнитного поля двигателя 1.
252

При параллельном включении ДПТ ПВ или смешанного возбуждения, как правило, соотношение параметров машин определяет Ф1 ≠ Ф2 и R1 ≠ R2. По рассмотренным выше причинам двухдвигательный электропривод с ДПТ ПВ практически не применяют.
а |
б |
Рис. 8.4. Механические характеристики двухдвигательного электропривода при Ф1 ≠ Ф2: а – с ДПТ НВ; б – с ДПТ со смешанным возбуждением
На рис. 8.4, б показаны механические характеристики при параллельном включении двух двигателей смешанного возбуждения для указанного неравенства параметров. Выравнивание нагрузок электродвигателей проводится введением в цепь якоря и (или) обмотки независимого возбуждения двигателя 1 добавочного сопротивления.
Последовательное включение двигателей. Этот способ применяется в большинстве двухдвигательных электроприводов, в частности для привода
Рис. 8.5. Схема последовательного включения ДПТ НВ
253
главных механизмов карьерных экскаваторов. На рис. 8.5 показана схема включения двух якорей двигателей с независимым возбуждением.
|
Рассмотрим случай, ко- |
|
|
гда параметры |
двигателя |
|
удовлетворяют |
соотношени- |
|
ям Ф1 = Ф2 = Ф; Rя1 > Rя2. На |
|
|
рис. 8.6 приведены механи- |
|
|
ческие характеристики двига- |
|
|
телей 1 и 2, имеющих |
|
Рис. 8.6. Механические харак- |
различную жесткость. При па- |
|
теристики двухдвигательного |
раллельном соединении дви- |
|
электропривода при последова- |
гателей распределение нагру- |
|
тельном соединении ДПТ НВ |
зок будет происходить в со- |
|
ответствии с жесткостями этих характеристик, как это показано на рис. 8.3, а. Однако при Ф1 = Ф2 моменты механически связанных (ω1 = ω2) и последовательно включенных двигателей должны быть равны:
ω=Uя1 − |
|
M |
=Uя2 − |
|
M |
. |
(8.4) |
|
|
|
|
|
|
||||
|
β |
|
β |
|
||||
|
|
|
||||||
|
|
1 |
|
|
|
2 |
|
|
Из полученного уравнения видно, что при разных жесткостях механических характеристик двигателей и равных магнитных потоках происходит перераспределение приложенных к двигателям напряжений Uя1 ≠Uя2.
Из уравнения электромеханической характеристики ДПТ НВ имеем при равенстве скоростей вращения двигателей
ω01 – Rя1 · Iя = ω02 – Rя2 · Iя, |
(8.5) |
что означает изменение скоростей идеального холостого хода и, соответственно, параллельное смещение механических характеристик.
254
Это приводит к автоматическому выравниванию нагрузок при любом значении момента нагрузки, так как в точке пересечения смещенных характеристик 1′ и 2′ М1 = М2 = Мс. На рис. 8.6 механические характеристики двигателей, построенные с учетом уравнения (8.5), обозначены как 1′ и 2′,
где ω01 = UсФя1 , ω02 = UсФя2 .
Аналогично происходит автоматическое выравнивание нагрузок при последовательном включении якорей двигателей с последовательным и смешанным возбуждением.
Если двигатели на связаны жестко общим валом, то последовательное включение их якорей в сеть недопустимо, так как из-за Rя1 ≠ Rя2 или Ф1 ≠ Ф2 произойдет резкое рассогласование нагрузок. В этом случае один из двигателей остановится с Iя = Iк.з, а второй будет вращаться с двойной скоростью.
8.2.2. Электромеханические характеристики двухдвигательного электропривода при изменении магнитного потока
Величина неравномерности распределения нагрузок в многодвигательном электроприводе может составить до 30–40 %, вплоть до перехода одного из двигателей в генераторный режим. Во избежание перекоса нагрузок при отсутствии системы выравнивания приходится выбирать электропривод с запасом мощности, чтобы предотвратить перегрев более нагруженного двигателя.
Как рассмотрено выше, выравнивание нагрузок в двухдвигательном электроприводе с параллельным соединением двигателей можно осуществить, изменяя сопротивления якорной цепи. В мощных электроприводах неоправданно растут потери на добавочных сопротивлениях. Для снижения потерь мощности возможно применение более экономичного способа выравнивания нагрузок изменением магнитного потока.
255

Возможны отклонения в развиваемых двигателями мо-
ментах и при последовательном соединении двигателей из-за отклонений потоков двигателей от номинального значения:
М = k(Ф ± ∆Ф)Iя. |
(8.6) |
При небольшой разнице значений потока однотипных двигателей неравномерность может быть снижена последовательным соединением обмоток возбуждения.
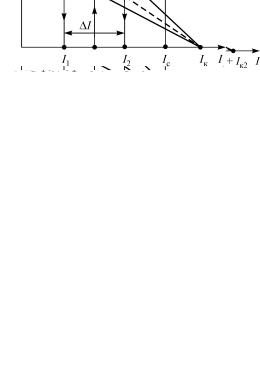
Рассмотрим статические электромеханические характеристики двухдвигательного электропривода с ДПТ НВ, приведенные на рис. 8.7, когда начальные магнитные потоки двигателей Ф01 = Ф02 = Ф0, а не равны сопротивления якорных цепей R1 > R2.
Рис. 8.7. Механические характеристики ДПТ НВ
при изменении Ф1: Ф01 = Ф02 = Ф0, R1 > R2,
Ф2 = const, Ф1 = var
В исходном состоянии при статической нагрузке Ic нагрузки двигателей составляют I1 и I2 со скоростями вращения ωс. Если уменьшением магнитного потока первого двигателя Ф1 установить его нагрузку равной нагрузке второго двигателя (поворот характеристики на угол α), совместная механическая характеристика смещается в положение 3′, что при неизменной суммарной нагрузке Ic = const вызывает изменение скорости привода до ω′с при равных нагрузках двигателей.
256
На рис. 8.8, а показано выравнивание нагрузок в двухдвигательном электроприводе с ДПТ НВ изменением магнитного потока Ф2 двигателя с меньшим сопротивлением якорной цепи (как в предыдущем способе изменением Ф1).
а
б
Рис. 8.8. Механические характеристики ДПТ НВ: а – при изме-
нении потока Ф2 (Ф01 = Ф02 = Ф0, R1 > R2, Ф1 = const, Ф2 = var);
б – одновременном изменении потоков (R1 = R2, Ф01 > Ф02, Ф1 = var,
Ф2 = var)
В этом случае регулятор скорости в автоматической системе управления двухдвигательным электроприводом должен обеспечить постоянство скорости не только при воз-
257
можных колебаниях нагрузки Iс, но и при изменениях магнитного потока возбуждения одной из машин в процессе выравнивания якорных токов. Это требует от системы управления большего резерва напряжения для регулирования и изменения возбуждения в большом диапазоне.
Для устранения недостатка системы выравнивания якорных токов путем воздействия на магнитный поток лишь одной из машин применяют одновременное изменение магнитных потоков возбуждения обоих двигателей.
На рис. 8.8, б показаны электромеханические характеристики при выравнивании токов якорей за счет одновременного изменения магнитных потоков возбуждения двух двигателей с равными сопротивлениями якорных цепей и отличающимися магнитными потоками.
Как видно из рисунка, при изменении Ф1 и Ф2 совместная электромеханическая характеристика не меняется и процесс выравнивания токов не сопровождается изменениями скорости привода, т.е. отсутствуют недостатки, присущие выравниванию с воздействием на магнитный поток возбуждения одной из машин. Поскольку при воздействии на магнитные потоки двух машин диапазон изменения Ф1 и Ф2 вдвое меньше, процесс выравнивания нагрузок будет менее инерционен.
8.2.3. Электромеханические свойства двухдвигательного электропривода с асинхронными двигателями
Как было показано выше, в двухдвигательном электроприводе нагрузка между двигателями распределяется неравномерно в соответствии с жесткостью их механических характеристик при равенстве скоростей идеального холостого хода ω0 обоих двигателей.
Рассматривая примеры характеристик двухдвигательного привода с ДПТ НВ на рис. 8.3, а, б, можно заключить, что влияние неодинаковости сопротивлений силовой цепи тем
258
выше, чем большую жесткость имеют характеристики двигателей. В асинхронном двухдвигательном электроприводе при АД с фазным ротором равенства жесткостей механических характеристик двигателей можно добиться введением добавочных резисторов в роторные цепи двигателей с более жесткими механическими характеристиками. Поэтому выравнивание нагрузок производится включением добавочных сопротивлений в каждую фазу ротора более нагруженной машины. При этом увеличиваются потери энергии в цепи ротора, что снижает экономичность двухдвигательного асинхронного электропривода, и этот способ применяется лишь для двигателей малой мощности (до 7–10 кВт).
Для асинхронных двигателей с короткозамкнутыми роторами выравнивание нагрузок простейшими средствами невозможно. Поэтому при АД с короткозамкнутым ротором для многодвигательного электропривода предпочтительны АД с повышенным скольжением или приходится подбирать двигатели с примерно равными жесткостями механических характеристик. Допустимо увеличение на 10–20 % расчетной мощности электропривода, чтобы иметь запас мощности для покрытия неравномерности распределения нагрузок.
Поскольку в двухдвигательном электроприводе на общем валу суммируются моменты, создаваемые каждой из машин, это позволяет получить специфические механические характеристики электропривода с целью улучшения регулировочных свойств электропривода, например для получения жестких механических характеристик при низких скоростях вращения.
8.3. Электромеханические свойства систем синхронного вращения электродвигателей
Системы синхронного вращения (ССВ) обеспечивают синхронное вращение двух и более двигателей, не связанных между собой механическим валом.
259
В таких системах, называемых электрическим валом, синхронизация вращения двигателей обеспечивается действием внутренних обратных связей. Их особенностью является отсутствие в них специальных устройств для контроля рассогласования между двумя или несколькими движущимися механическими валами (двигателей или рабочих машин).
Различают ССВ с применением вспомогательных двигателей для приведения основных, механически связанных с рабочими машинами, и без них.
Практическое применение в ССВ нашли асинхронные двигатели с фазовым ротором, хотя возможно применение синхронных и двигателей постоянного тока.
8.3.1.Система синхронного вращения
свспомогательными асинхронными двигателями
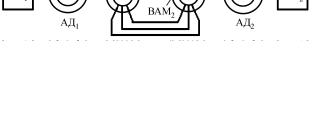
Схема силовой части такого электрического вала показана на рис. 8.9.
Обмотки статоров АД1, ВАМ1 и соответственно АД2, ВАМ2 включены в сеть переменного тока для создания встречно направленных вращающих моментов.
Рис. 8.9. Силовая схема электрического вала
Если параметры основных и вспомогательных машин одинаковые, при равных нагрузках на этих валах будет иметь место их синхронное вращение. Электродвижущие силы роторов ВАМ1 и ВАМ2 – Е21 и Е22 – будут равны и направлены
260