

Теория электропривода учебное пособие
..pdfМс.м – момент статического сопротивления на валу механизма (знак (+) в (2.36) – для режима торможения, а знак (–) – для режима пуска рабочей машины.
С учетом потери в передачах через КПД (η) получим значения времени пуска и торможения электропривода:
|
|
|
|
J |
м |
+ J′ |
i2 |
|
|
||||
t |
п |
= |
|
|
|
д |
|
|
|
, |
(2.37) |
||
M i η−M |
с.м |
||||||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
J |
м |
+ J ′ |
i2 |
|
|
||||
|
tт = |
|
|
|
д |
|
|
, |
|
(2.38) |
|||
|
|
|
|
i |
|
|
|
|
|||||
|
|
|
|
M |
+ Mс.м |
|
|
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
η |
|
|
|
|
|
||
где Jм – момент инерции механизма;
J'д – момент инерции двигателя и элементов на его валу (муфта, датчики, быстроходный вал редуктора);
М – пусковой или тормозной момент двигателя (при ступенчатом пуске – среднее значение момента).
Из полученных уравнений видно, что tп = f(i) и tт = f(i) – экстремальные функции, имеющие минимальное значение
при i = iопт. Оптимальные значения iопт.п при пуске или iопт.т при торможении определяются исследованием уравнений (2.37) и (2.38) на экстремум из условия
|
|
|
|
|
|
dtп |
= ω × |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
di |
|
м |
|
|
|
|
|
|
|
|
× |
2Jд′ |
iопт.п (М iопт.п η−Мс.м ) −М η (Jм + Jд′ iопт2 |
.п ) |
= 0. |
|
|||||||||
|
|
|
|
(М i |
η− М |
с.м |
)2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
опт.п |
|
|
|
|
|
|
|
|
||
|
|
Приравняв к нулю числитель, получим i2 |
−2 |
Мc.м |
× |
||||||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
опт.п |
|
|
|
М η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
×i |
|
|
− |
Jм |
= 0, решения которого для режимов пуска и тор- |
||||||||||
|
|
|
|||||||||||||
опт.п |
|
J ′ |
|
|
|
|
|
|
|
|
|
||||
д
можения
41

i |
= |
Мc.м |
± |
|
Мc.м |
2 |
+ |
Jм |
. |
(2.39) |
М η |
|
|
|
|||||||
опт.п |
|
|
М η |
|
J′ |
|
||||
|
|
|
|
|
|
|
|
д |
|
|
Перед корнем надо учитывать при расчетах лишь знак
(+). При знаке (–) iопт.п не имеет физического смысла (iопт.п< 0). Аналогично можно получить выражение для расчета оп-
тимального передаточного числа при торможении:
i |
= −Мc.м η + |
|
Мc.м |
η 2 |
+ |
Jм |
. |
(2.40) |
|
|
|
|
|
||||||
опт.т |
М |
|
М |
|
|
Jд′ |
|
||
|
|
|
|
|
|
||||
Поскольку iопт.п ≠ iопт.т, то при реальных расчетах принимают среднее либо средневзвешенное значение по известным выражениям.
Если привод имеет большие моменты инерции и незначи-
тельную статическую нагрузку, т.е. при |
|
Мc.м 2 |
Jм |
, вели- |
|
|
|
|
|
||
М η |
J′ |
||||
|
|
|
|
д |
|
чина оптимального передаточного числа приближенно может быть найдена по упрощенной формуле
i |
Jм |
. |
(2.41) |
|
|||
опт |
Jд′ |
|
|
|
|
|
|
Расчетное значение iопт, как правило, не совпадает с конкретными передаточными числами серийных редукторов. В этом случае при выборе передаточного числа лучше принимать ближайшее большее значение, так как при этом потери ускорения механизма будут меньше.
2.7. Системы единиц в механике электропривода
Изложение механики электропривода, как и всех остальных разделов курса теории электропривода, проводится с использованием международных единиц СИ. Однако, учитывая, что заводы – изготовители электрооборудования выпускают изделия с техническими описаниями и каталогами,
42
в которых используется техническая система единиц и даже внесистемные единицы (например, скорость в оборотах в минуту), необходимо хорошо знать правила и формулы перевода единиц одной системы в единицы другой.
В табл. 2.1 показаны для СИ и технической системы единицы измерений основных величин, используемых в механике электропривода. В этой таблице обозначением кг указан килограмм-масса для единиц СИ, а обозначением кГ – килограмм-сила (для единиц технической системы).
Для перехода от СИ к технической системе единиц и обратно следует пользоваться следующими соотношениями:
1 кГ = 9,81 Н;
1 Н = 0,102 кГ;
1 кГ·м = 9,81 Дж; 1 Дж = 1 Н·м = 0,102 кГ·м;
1 Дж·с2 = 1 Н·м·с2 = 1 кг·м2 = 0,102 кГ·м·с2; 1 кГ·м·с2 = 9,81 Дж·с2 = 9,81 Н·м·с2 = 9,81 кг·м2.
Таблица 2.1 Единицы измерений основных величин для различных систем
Наименование |
Обо- |
Единицы измерений |
||
значе- |
|
Техническая |
||
величины |
СИ |
|||
ние |
система |
|||
|
|
|||
Сила |
F |
Н |
кГ |
|
Момент |
M |
Н·м = Дж = Вт·с |
кГ·м |
|
Масса |
m |
кг = Н·с2/м |
кГ·с2/м |
|
Момент инерции |
J |
Дж·с2 = Нм·с2 = кг·м2 |
кГ·м·с2 |
|
Скорость вращения |
ω |
с–1 |
с–1 |
|
Линейная скорость |
V |
м/с |
м/с |
|
Мощность |
P |
Вт = Н·м/с = Дж/с |
кГ·м/с |
|
Работа |
A |
Дж = Н·м = Вт·с |
кГ·м |
|
Угловое перемещение |
α |
рад |
рад |
|
Линейное перемещение |
S |
м |
м |
|
|
|
|
43 |
|
При решении задач механики электропривода некоторые исходные данные задаются с использованием внесистемных единиц, указанных в табл. 2.2.
|
|
Таблица 2.2 |
Внесистемные единицы |
||
|
|
|
Наименование величины |
Обозначение |
Единица измерения |
Маховой момент |
GD2 |
кГ·м2 |
Скорость вращения |
п |
об/мин |
Угловое перемещение |
αº |
град |
Рассмотрим основные формулы перехода от внесистемных единиц к технической системе и единицам СИ.
Момент инерции вращающегося тела определяется по соотношению
J = m · ρ2,
где т – величина массы, вращающейся вокруг оси тела; ρ – радиус инерции.
Обозначим через Jт.с момент инерции в технической сис-
теме единиц. В этом случае, подставив массу m Gg
в уравнение момента инерции и выразив радиус инерции че-
рез диаметр инерции ρ = D2 , получим связь между моментом
инерции в технической системе единиц Jт.с и внесистемной единицей – маховым моментом GD2:
Jт.с = |
G |
D 2 |
GD2 |
. |
|
|
|
= |
4g |
||
|
g |
2 |
|
|
|
Можно JСИ обозначить через момент инерции в единицах СИ.
44
C учетом, что для СИ численные значения массы и веса равны, т.е. т = G, из этого соотношения получим
JСИ = m ρ2 = G D |
2 |
= GD2 . |
2 |
|
4 |
Это соотношение устанавливает связь между моментом инерции в единицах СИ JСИ и внесистемной единицей – маховым моментом GD2.
Из выражений предыдущих уравнений связь между моментом инерции в СИ и в технической системе единиц будет
JСИ = g · Jт.с; Jт.с = JgСИ .
Обозначение (GD2) понимается как единый символ обозначения махового момента вращающегося тела, адекватный понятию момента инерции J.
В электроприводе не всегда возможно определить расчетным путем массу неоднородных тел (например, якорь электрической машины) или радиус инерции деталей со сложной геометрией.
|
|
|
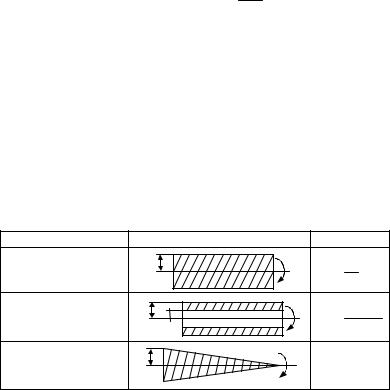
Таблица 2.3 |
Радиусы инерции простейших тел вращения |
|||
Тип |
|
Схема |
Формула |
Сплошной цилиндр |
|
r |
ρ2 = r2 |
|
|
|
2 |
Полый цилиндр |
r1 |
r2 |
ρ2 = r12 + r22 |
|
|
|
2 |
Сплошной конус |
r |
ρ2 = 0,3r2 |
45
Для некоторых простейших тел вращения можно получить радиус инерции расчетным путем по исходным геометрическим размерам (табл. 2.3). На практике моменты инерции электродвигателей или электропривода в целом определяют экспериментальным путем.
3. ДИНАМИКА МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
3.1.Уравнение движения электропривода
Всоответствии с законом Ньютона поступательное движение в системе ЭП описывается как
|
F – Fc = Fдин = m · |
dV |
, |
(3.1) |
|
dt |
|||
|
|
|
|
|
где F |
– движущая сила; |
|
|
|
Fc |
– сила сопротивления; |
|
|
|
Fдин – инерционная сила.
Для вращательного движения это уравнение имеет ана-
логичный вид: |
|
||
М – Мс = Мдин = J · |
dω |
. |
(3.2) |
|
|||
|
dt |
|
|
Здесь аналогом массы является суммарный приведенный к валу двигателя момент инерции J, вместо линейной скорости V рассматривается угловая скорость двигателя ω, а в левую часть уравнения входят момент двигателя М и статический момент сопротивления механизма Мс. Динамический момент Мдин, равный разности движущего момента и момента сопротивления, пропорционален угловому ускорению электропривода.
Уравнение (3.2) в электроприводе получило название уравнения движения, по которому динамический момент
46
возникает только в переходных режимах, т.е. тогда, когда меняется кинетическая энергия при ускорении и замедлении электропривода. Приведенные уравнения (3.1) и (3.2) можно применять лишь для электроприводов с J = const.
В общем случае выражение для нахождения динамического момента Мдин можно определить из уравнения запаса кинетической энергии для вращающегося тела [1, 5]:
A = |
Jω2 |
, |
(3.3) |
|
2 |
||||
|
|
|
||
где J – момент инерции тела, |
обладающего |
массой m, |
||
J = m · r2; |
|
|
|
|
r – радиус вращающегося тела правильной цилиндрической формы.
Мощность, которую вращающиеся массы получают при ускорении электропривода или отдают при торможении,
|
|
|
P |
|
= dA |
= Jωdω + ω2 |
dJ |
. |
|
(3.4) |
||||||
|
|
|
дин |
|
dt |
|
|
dt |
|
2 |
dt |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Тогда динамический |
|
момент можно |
найти с |
учетом |
|||||||||||
ω= |
dα |
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мдин = |
Рдин |
= J |
dω |
+ |
ω dJ |
= J |
dω |
+ |
ω dJ dα |
= |
|
|||
|
|
ω |
dt |
|
2 dt |
dt |
2 dt dα |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
= J dω |
+ ω2 |
dJ |
. |
|
|
|
|
(3.5) |
|||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
dt |
2 dα |
|
|
|
|
|
|
||
Уравнение для определения динамического момента состоит из двух составляющих: первое определяет изменение динамического момента при изменении угловой скорости ω электропривода, второе – при изменении его момента инерции во времени или угла поворота α вращающегося рабочего механизма.
47
У поступательно движущегося рабочего механизма со скоростью V и массой m динамическая составляющая мощности определяется из запаса кинетической энергии:
Pдин = |
d mV 2 |
|
= mV |
dV |
+ |
V 2 dm |
. |
(3.6) |
||
|
|
2 |
|
dt |
2 dt |
|||||
|
||||||||||
|
dt |
|
|
|
|
|
||||
Динамическое усилие поступательно движущегося рабочего органа определяется ускорением и изменением массы при его движении:
|
P |
|
dV |
|
V dm dS |
|
dV |
|
V 2 dm |
|
|
F = |
дин |
= m |
|
+ |
|
|
= m |
|
+ |
|
. (3.7) |
|
|
|
|
|
|
||||||
дин |
V |
|
dt |
|
|
2 dt dS |
|
dt |
|
2 dS |
|
|
|
|
|
|
|
|
|||||
В качестве |
примеров |
изменения |
момента инерции |
||||||||
в уравнении (3.5) можно привести зависимость момента инерции барабана с многослойной навивкой каната подъемной установки от глубины подъема, изменение момента инерции кабельного барабана в установках кабельного производства. Примером изменения массы при поступательном движении рабочего механизма является изменение массы ковша при черпании грунта экскаватором-драглайном, изменение массы груза ленточного конвейера.
Рассмотренные выше условия изменения в уравнениях движения электропривода возникают при работе машин, в которых перемещение рабочего органа по пространственным траекториям осуществляется несколькими индивидуальными электроприводами, предусмотренными для каждой координаты перемещения (экскаваторы, краны, роботы
ит.п.).
Вподобных случаях приведенный момент инерции электропривода, как и статический момент сопротивления, следует полагать независимой функцией времени J(t). Тогда уравнение движения электропривода примет вид
M − Mc (t) = J (t) |
dω |
|
+ω |
dJ (t) |
. |
(3.8) |
dt |
|
|||||
|
|
dt |
|
|||
48

Функции J(t) и Mc(t) при этом следует определить путем анализа движения электропривода, вызывающего изменения момента инерции и нагрузки.
Полученные математические описания динамических процессов в механической части электропривода, представляемой уравнениями движения, позволяют анализировать возможные режимы движения электропривода. Условием динамического процесса в системе, описываемой (3.8),
является ddωt ≠ 0, т.е. наличие изменений скорости электро-
привода.
Для анализа статических режимов работы электропри-
вода необходимо положить ddωt = 0.
3.2.Уравнение движения электропривода
сучетом упруговязких элементов
Ранее были рассмотрены кинематические схемы и уравнения приведения масс и моментов инерций к одной оси движения без учета упругости передаточных механизмов. В действительности все элементы механической системы электропривода обладают упругими свойствами, что в некоторых случаях определяет принципиальное отличие их движения от движения механической системы с жесткими связями. При резком изменении момента сопротивления движению на валу рабочей машины из-за упругости соединительного вала не будет мгновенного изменения момента сопротивления движению на конце гибкого вала, связанного с двигателем, также при передаче меняющегося момента сопротивления движению от рабочей машины к двигателю имеется некоторое запаздывание, величина которого зависит от упругости соединительного вала.
49
В реальных передаточных устройствах может быть несколько упругих элементов с вращательным и поступательным движениями, причем жесткость всех этих элементов в общем случае различна. Математическое описание движения такой упругой системы требует составления большого числа уравнений. Более удобным является составление так называемой расчетной схемы механической части электропривода, в которой выделяются сосредоточенные движущиеся массы, соединенные упругими валами, приведенная (расчетная) жесткость которых рассчитывается по определенным правилам.
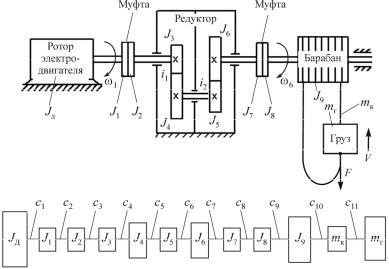
Рассмотрим в качестве примера составление расчетной схемы механической части электропривода подъемного механизма, кинематическая схема которой показана на рис. 3.1 [1].
а
б
Рис. 3.1. Схемы механической части подъемного механизма: а – кинематическая; б – расчетная
50