

Математическая обработка результатов геодезических измерений
..pdfТаблица 1.2
Ведомость вычисления координат точек теодолитного хода (пример)
точек№ |
Горизонтальные углы |
|
|||
Измерен- |
Поправка |
|
Исправ- |
Дирекци- |
|
|
ные |
|
|
ленные |
онные |
|
|
|
углы |
||
|
углы |
|
|
углы |
|
|
|
|
|
||
|
|
|
|
|
|
1 |
131 29,5 |
0,5 |
|
|
45 45 |
|
|
|
|
|
|
2 |
108 43 |
|
|
108 43 |
|
|
|
117 02 |
|||
|
|
|
|
|
|
3 |
79 27 |
|
|
79 27 |
|
|
|
217 35 |
|||
|
|
|
|
|
|
4 |
130 26,5 |
0,5 |
|
130 27 |
|
|
267 08 |
||||
|
|
|
|
|
|
5 |
89 52,5 |
0,5 |
|
89 53 |
|
|
357 15 |
||||
|
|
|
|
|
|
1 |
|
|
|
131 30 |
|
|
|
|
45 45 |
||
|
|
|
|
|
|
изм = 539 58,5 ; |
исправл =540 |
||||
|
|
|
|||
теор = 540 ; |
|
|
|
|
|
f = –1,5 ; |
|
|
|
|
|
Допустимая f 1 n 1
n 1 5 2,2 ;
5 2,2 ;
Гори- |
Приращения |
Исправленные |
|
|
|||
зон- |
координат |
приращения |
Координаты |
||||
тальные |
|
|
координат |
|
|
||
проло- |
Х |
Y |
Х |
Y |
Х |
Y |
|
жения |
|||||||
|
|
|
|
|
|
||
187,22 |
-0,05 |
+0,02 |
130,59 |
134,13 |
1011,00 |
1015,00 |
|
|
|
||||||
130,64 |
134,11 |
|
|
||||
1141,59 |
1149,13 |
||||||
244,87 |
-0,06 |
+0,03 |
–111,35 |
218,15 |
|||
|
|
||||||
–111,29 |
218,12 |
|
|
||||
1030,24 |
1367,28 |
||||||
224,68 |
-0,05 |
+0,02 |
–178,10 |
-137,01 |
|||
|
|
||||||
–178,05 |
–137,03 |
|
|
||||
852,14 |
1230,27 |
||||||
207,44 |
-0,05 |
+0,02 |
–10,42 |
-207,16 |
|||
|
|
||||||
–10,37 |
–207,18 |
|
|
||||
841,72 |
1023,11 |
||||||
169,52 |
-0,04 |
+0,02 |
169,28 |
–8,11 |
|||
|
|
||||||
169,32 |
–8,13 |
|
|
||||
1011,00 |
1015,00 |
||||||
Р=1033,73 |
=+0,25 |
=-0,11 |
=0 |
=0 |
|||
fX = +0,25; |
fY = – 0,11; |
|
|
|
|
|
|||||
fабс f X2 |
fY2 |
|
0,252 |
( 0,11)2 |
0,27; |
||||||
fотносит |
fабс |
|
|
0,27 |
|
|
|
1 |
; P = 1033,73; |
||
|
1033,73 |
3828 |
|||||||||
|
P |
|
|
|
|||||||
fдоп = 1/2000; |
|
f относит f доп. |
|
||||||||
11
Пример вычисления дирекционных углов.
Дирекционный угол исходной стороны 1–2 равен 45 45 . Измеренные горизонтальные углы правые по ходу.
2 3 1 2 180 2 45 45 180 108 43 117 02 ;3 4 2 3 180 3 117 02 180 79 27 217 35 ;4 5 3 4 180 4 217 35 180 130 27 267 08 ;5 1 4 5 180 5 267 08 180 89 53 357 15 ;
1 2 5 1 180 1 357 15 180 131 30 405 45 360 45 45.
При вычислении дирекционного угла получилось значение 405 45 . Из полученного значения вычитается 360
405 45 360 45 45 .
Контроль вычисления дирекционных углов получился.
Все результаты вычислений заносятся в таблицу «Ведомость вычисления координат» (см. табл. 1.2) в графу «Дирекционные углы».
1.3. Вычисление приращений координат
Вычисление приращений координат выполняется по формулам:
X d cos ; |
Y d sin , |
где d – горизонтальное проложение (длина) линии; – дирекционный угол этой линии.
Приращения координат вычисляются с точностью два знака после запятой.
Пример вычисления приращений координат:
X1 2 d1 2cos 1 2 187,22cos45 45 130,64;
X 2 3 d2 3cos 2 3 244,87cos117 02 111,29;X 3 4 d3 4cos 3 4 224,68cos217 35 178,05;
X 4 5 d4 5cos 4 5 207,44cos267 08 10,37;
X 5 1 d5 1cos 5 1 169,52cos357 15 169,32.
Y1 2 d1 2sin 1 2 187,22sin 45 45 134,11;
Y2 3 d2 3sin 2 3 244,87sin117 02 218,12;
Y3 4 d3 4sin 3 4 224,68sin 217 35 137,03;Y4 5 d4 5sin 4 5 207,44sin 267 08 207,18;
Y5 1 d5 1sin 5 1 169,52sin357 15 8,13.
12

Все результаты вычисления заносятся в табл. 1.2. Пример вычисления тригонометрических функций на калькуляторе приведен в прил. 1 и 2.
1.4. Уравнивание линейных измерений (уравнивание приращений координат)
Уравнивание – это вычисление невязки и ее распределение на вычисленные приращения координат.
Разность между суммой вычисленных приращений координат и теоретической суммой называется линейной невязкой хода и обозначается fХ и fY. Уравнивание линейных измерений выполняется раздельно по осям Х и Y.
Линейная невязка вычисляется по формулам:
f X X X теор; |
fY Y Yтеор . |
Теоретическая сумма приращений координат зависит от геометрии хода. В замкнутом теодолитном ходе она равна нулю, тогда невязка равна
f X X ; |
fY Y . |
Прежде чем распределять невязки в приращения координат, необходимо убедиться в их допустимости. Для чего вычисляется абсолютная невязка хода fабс
fабс  f X2 fY2
f X2 fY2
и относительная
fотн fPабс ,
где Р – периметр хода (сумма горизонтальных проложений di), м.
Относительная невязка сравнивается с допустимой fдоп 20001 или
fдоп 10001 .
В случае, когда полученная относительная невязка допустима, т.е. fотн 20001 , то вычисляются поправки в приращения координат пропор-
ционально длинам сторон. Невязки распределяются с обратным знаком.
Если fотн |
1 |
, то проверяются вычисления в п. 1.3 и 1.4. |
||||||
2000 |
||||||||
|
|
|
|
|
и Y вычисляются по форму- |
|||
Поправки в приращения координат X |
||||||||
лам с округлением до 0,01 м: |
|
|
|
|||||
|
|
Xi |
f X |
di ; |
Yi |
fY |
di , |
|
|
|
|
|
|||||
|
|
|
P |
|
P |
|||
13

где Xi и Yi – поправки в приращение по оси Х и Y, соответственно, м; fX и fY – невязки по осям, м; Р – периметр (сумма сторон), м; di – горизонтальное проложение, м.
Знак у поправки противоположен знаку невязки.
После вычисления поправок следует сделать проверку, т.е. сложить все поправки. Если их сумма равняется невязке с обратным знаком, то распределение невязки выполнено правильно. То есть:
Xi f X |
и Yi fY . |
Вычисляются исправленные приращения координат по формулам:
X испр X вычисл X ; |
Yиспр Yвычисл Y . |
Полученные поправки алгебраически прибавляются к соответствующим приращениям и получаются исправленные приращения.
Контроль: сумма исправленных приращений в замкнутом теодолитном ходе должна равняться нулю, т.е. должно выполняться равенство:
X испр 0 и Yиспр 0.
Пример вычисления линейной невязки:
f X X 130,64 111,29 178,05 ( 10,37) 169,32 0,25; fY Y 134,11 218,12 137,03 207,18 8,13 0,11.
fабс  f X2 fY2
f X2 fY2  0,252 ( 0,11)2 0,27; fотн fPабс 1033,730,27 38281 20001 .
0,252 ( 0,11)2 0,27; fотн fPабс 1033,730,27 38281 20001 .
Пример вычисления поправок в приращения координат:
X 1 |
|
|
|
|
|
f X |
|
|
d1 2 |
|
|
0,25 |
|
187,22 0,05; |
|||||||
|
|
|
|
P |
|
1033 |
|
||||||||||||||
X 2 |
|
f X |
|
|
d2 3 |
|
|
0,25 |
|
|
244,87 0,06; |
||||||||||
P |
|
|
1033 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
X 3 |
|
|
|
f X |
|
|
d3 4 |
|
|
0,25 |
|
|
|
224,68 0,05; |
|||||||
|
|
|
|
|
|
|
1033 |
|
|||||||||||||
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
||||||
X 4 |
|
f X |
|
|
d4 5 |
|
|
0,25 |
|
|
207,44 0,05; |
||||||||||
|
|
|
|
|
1033 |
||||||||||||||||
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|||||||
X 5 |
|
f X |
|
|
d5 1 |
|
|
0,25 |
|
169,52 0,04; |
|||||||||||
|
|
|
|
|
1033 |
||||||||||||||||
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
0,25. |
||||||
Контроль |
|
|
|
|
|
|
|
|
|
|
|||||||||||
Y1 |
|
|
fY |
|
|
d1 2 0,11187,22 0,02; |
|||||||||||||||
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
P |
|
|
|
|
1033 |
|
|
|
|
||||
Y 2 |
|
fY |
|
d2 3 |
0,11244,87 0,03; |
||||||||||||||||
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
1033 |
|
|
|
||||
14
Y 3 |
|
|
|
fY |
|
d3 4 |
|
0,11 |
224,68 0,02; |
|
|
P |
1033 |
||||||
Y 4 |
|
fY |
|
d4 5 |
|
0,11 |
207,44 0,02; |
||
P |
|
1033 |
|||||||
|
|
|
|
|
|
|
|
||
Y 5 |
|
fY |
|
d5 1 |
|
0,11169,52 0,02; |
|||
|
|
||||||||
|
|
|
|
P |
|
|
|
1033 |
0,11. |
Контроль |
|
|
|
|
|||||
Пример вычисления исправленных приращений координат:
X испр X вычисл X ; |
Yиспр Yвычисл Y . |
|
||
Исправленные приращения: |
|
|
||
X1 2 : 130,64 0,05 130,59; |
Y1 2 : 134,11 0,02 134,13; |
|||
X 2 3 |
: 111,29 0,06 111,35; |
Y2 3 : 218,12 0,03 218,15; |
||
X 3 4 |
: 178,05 0,05 178,10; |
Y2 3 : 137,03 0,02 137,01; |
||
X 4 5 |
: 10,37 0,05 10,42; |
Y4 5 : 207,18 0,02 207,16; |
||
X 5 1 |
: 169,32 0,04 169,28; |
Y5 1 : 8,13 0,02 8,11; |
||
Контроль |
X 0; |
Контроль |
Y 0. |
|
Сумма исправленных приращений равна нулю, т.е. контроль выполняется.
1.5. Вычисление координат точек теодолитного хода
Если контроль вычисления и распределения линейной невязки выполняется, то вычисляются координаты всех точек хода по формулам:
X n 1 X n X испр; |
Yn 1 Yn Yиспр – координата последующей |
точки равна координате предыдущей точки плюс исправленное приращение координат.
Контроль вычисления координат: в результате последовательного вычисления координат точек замкнутого теодолитного хода получаются координаты исходной точки.
Пример вычисления координат точек теодолитного хода: X 2 X1 X 1011,00 130,59 1141,59;
X 3 X 2 X 1141,59 111,35 1030,24;
X 4 X 3 X 1030,24 178,10 852,14;
X 5 X 4 X 852,14 ( 10,42) 841,72;
X1 X 5 X 841,72 169,28 1011,00.
15
Y2 Y1 Y 1015,00 134,13 1149,13;
Y3 Y2 Y 1149,13 218,15 1367,28;
Y4 Y3 Y 1367,28 137,01 1230,27;
Y5 Y4 Y 1230,27 207,16 1023,11;
Y1 Y5 Y 1023,11 8,11 1015,00.
Контроль получился, т.е. в результате вычислений получились координаты исходной точки. Все результаты вычислений заносятся в табл. 1.2.
1.6. Построение контурного плана в масштабе 1:2000
План строится на ватмане формата А3. Графические построения начинаются с построения координатной сетки. Ее размеры 10 10 см.
1.6.1. Построение координатной сетки
Формат располагается вертикально. На листе проводятся диагонали очень тонкими линиями, чтобы потом их не убирать, т.к. они являются вспомогательным построением (см. рис. 1.1).
От точки пересечения диагоналей откладываются отрезки произвольной длины, но одинаковые на все четыре стороны. Например, 17 смOA OB OC OD . Через полученные точки вспомогательными линиями строится прямоугольник АВСD. Отрезки АВ (DС) и АD (ВС) делятся пополам и получаются точки а и с. Из ведомости вычисления координат выбираются максимальное и минимальное значения координат по оси Х и Y и вычисляются средние значения
X ср 0,5 X max X min 0,51141,59 841,72 991,655;
Yср 0,5 Ymax Ymin 0,51367,28 1015,00 1191,14.
Затем вычисляются отрезки аb и cd: ab X ср 800 991,66 800 191,66; cd Yср 1000 1191,14 1000 191,14.
800 и 1000 – числа кратности для масштаба 1:2000.
Например, от точек a слева и справа строим вниз 191 м с учетом масштаба (см. рис. 1.1). Через полученные точки b проводим координатную линию со значением 800. От точек b вверх и вниз строим отрезки по 10 см. Через вновь полученные точки проводим координатные линии. Значения у координатных линий изменяются на +200 вверх и на –200 вниз от линии bb.
16

Рис. 1. Построение координатной сетки
Аналогичные построения проводятся по оси Y (см. рис. 1.1). Влево от точки c строится отрезок 191,14 м с учетом масштаба. Получается координатная линия со значением 1000. От координатной линии со значением 1000 влево и вправо строятся координатные линии через 10 см. Направление оси Y слева направо. Погрешность построения координатных линий
0,2 мм.
Контроль построения координатной сетки: измеряются диагонали квадратов 10 10 см. Расхождение диагоналей в квадрате допускается не более 0,2 мм. Оцифровка координатных линий выполняется через 200 м для масштабов 1:2000 и через 100 м для масштабов 1:1000.
1.6.2. Нанесение точек теодолитного хода на план
Точки теодолитного хода наносятся на план по координатам Х и Y с помощью измерителя и линейки. Определяется квадрат, в котором будет находиться данная точка. Например, координаты точки 2 равны X 2 1141,59 м; Y2 1149,13 м. Для точки теодолитного хода 2 вычисля-
ются отрезки
X 2 1000 1141,59 1000 141,59 м.
Число 1000 – это координата южной линии координатной сетки.
17
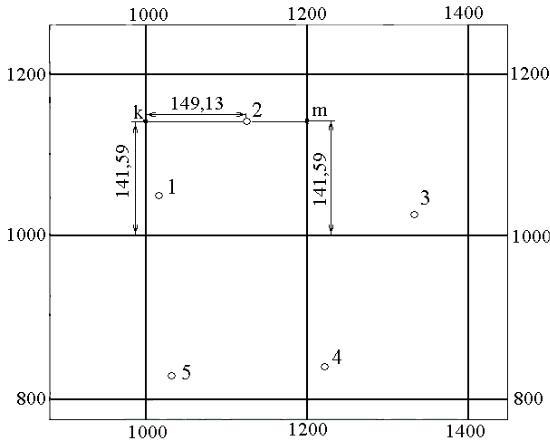
На сторонах квадрата от координатной линии 1000 слева и справа строятся с учетом масштаба отрезки длиной 141,59 м и ставятся точки k и m (см. рис. 1.2). К точкам k и m прикладывается линейка и по ее направлению строится отрезок длиной
Y2 1000 1149,13 1000 149,13 м с учетом масштаба.
Число 1000 – координата западной линии координатной сетки. Получается положение точки 2. Аналогично строятся другие точки. Контроль построения точек теодолитного хода: измеряются расстоя-
ния между точками теодолитного хода на плане и сравниваются эти значения с горизонтальными проложениями из «Ведомости вычисления координат» (см. табл. 1.2).
П dисх dплан ,
где П – погрешность между длинами линий, м; dисх и dплан – длины линий, соответственно исходная и измеренная на плане, м.
Рис. 1.2. Построение точек теодолитного хода по координатам По результатам контроля составляется дефектная ведомость (табл. 1.3).
18

Таблица 1.3
Дефектная ведомость
Наименование |
Длина линии |
Измеренная длина |
Расхождение в |
|
длинах (погреш- |
||||
линии |
исходная, м |
на плане, м |
||
ность), м |
||||
|
|
|
||
1–2 |
187,22 |
|
|
|
2–3 |
244,87 |
|
|
|
3–4 |
224,68 |
|
|
|
4–5 |
207,44 |
|
|
|
5–1 |
169,52 |
|
|
Допустимая погрешность графических построений составляет 0,3 мм от масштаба плана и зависит от точности масштаба. Для масштаба 1:2000 точность равна 0,2 м, тогда допустимая величина составит 0,6 м.
Построение точек теодолитного хода проверяется также по дирекционным углам линий.
1.6.3. Нанесение ситуации на план теодолитной съемки
Построение ситуации на плане соответствуют способам съемки, результаты которой отражены в абрисе (рис. 1.3).
В теодолитной съемке применяются способы съемки ситуации: полярный, перпендикуляров, линейной и угловой засечки, створа и обхода.
Рис. 1.3. Абрис (в скобках указаны номера условных знаков по каталогу 5 )
19
С точки теодолитного хода 5 выполнена съемка полярным способом. Результаты измерений приведены в таблице 1.4.
Таблица 1.4
Номер |
Результаты измерения на ст. 5 |
|
||
|
|
Примечание |
||
Отсчет по горизонталь- |
Измеренная |
|||
точки |
||||
|
||||
|
ному кругу |
длина, м |
|
|
|
|
|
|
|
а |
8 |
218 |
контур |
|
|
|
|
|
|
б |
21 |
215 |
контур |
|
|
|
|
|
|
в |
43 |
205 |
контур |
|
|
|
|
|
|
г |
65 |
160 |
контур |
|
|
|
|
|
|
Согласно указанным измерениям наносятся точки на план и соединяются в соответствии с рисунком абриса. В окончательном варианте на плане цифры и линии, указанные в абрисе, не сохраняются. Остается только ситуация, которая показывается условными знаками. Все контуры и знаки аккуратно вычерчивают с соблюдением начертания и размеров, согласно «Условных знаков для топографических планов масштабов 1:500; 1:1000; 1:2000; 1:5000» 5 . Абрис выдается на занятиях.
1.6.4. Окончательное оформление плана теодолитной съемки
Учебные варианты планов теодолитной съемки выполняются на форматах, которые не соответствуют стандартам на топографическую документацию. Исходя из этого, оформление выполняется в следующей последовательности.
Проводятся тонкие линии (0,2–0,4 мм) параллельно координатной сетке. Эти линии ограничивают построенный план со всех сторон и являются внутренней рамкой.
На расстоянии 14 мм от внутренней рамки проводятся толстые линии (1,2 мм). Это внешняя рамка (прил. 3).
Между внутренней и внешней рамками подписываются линии координатной сетки.
Под южной рамкой выполняются надписи: масштаб, вид съемки, фамилии автора работ и преподавателя. Размер шрифта № 4 (рис. 1.4).
Образец титульного листа приведен в приложении 4.
20