

Математическая обработка результатов геодезических измерений
..pdfТаблица 7.8
Ведомость вычисления координат точек теодолитного хода
точек№ |
Горизонтальные углы |
|
|||
Измерен- |
Поправка |
Исправ- |
Дирек- |
||
|
|
||||
|
|
ционные |
|||
|
ные |
|
ленные |
углы |
|
|
углы |
|
углы |
||
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
168 22 |
|
|
|
|
|
||
2 |
72 21,5 |
+0,5 |
72 22 |
||
276 00 |
|||||
|
|
|
|
||
3 |
101 26 |
|
101 26 |
||
|
354 34 |
||||
|
|
|
|
||
4 |
91 43 |
|
91 43 |
||
|
82 51 |
||||
|
|
|
|
||
5 |
112 29,5 |
+0,5 |
112 30 |
||
150 21 |
|||||
|
|
|
|
||
1 |
161 58,5 |
+0,5 |
161 59 |
||
168 22 |
|||||
изм = 539 58,5 ;теор = 540 ;
f = –1,5 ;
Допустимая f 1  n 1
n 1  5 2,2 ;
5 2,2 ;
Гори- |
Приращения |
|
|
|
|
Исправленные |
|
|
|
|
|
||||||||||
зон- |
координат |
|
|
|
|
|
|
приращения |
|
Координаты |
|||||||||||
тальные |
|
|
|
|
|
|
|
|
|
|
|
|
координат |
|
|
|
|
|
|||
проло- |
Х |
|
|
|
|
Y |
|
|
|
|
|
Х |
|
|
Y |
|
Х |
|
|
Y |
|
жения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
126,68 |
0,05 |
|
|
|
0,02 |
|
|
–124,03 |
25,56 |
|
520,00 |
|
730,00 |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
–124,08 |
|
25,54 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
395,97 |
|
755,56 |
||||||||||||||
144,81 |
0,06 |
|
|
|
0,03 |
|
|
15,20 |
|
–143,99 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
15,14 |
|
|
–144,02 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
411,17 |
|
611,57 |
|||||||||||||
137,25 |
0,06 |
|
|
|
0,02 |
|
|
136,69 |
|
–12,97 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
136,63 |
|
|
–12,99 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
547,86 |
|
598,60 |
|||||||||||||
108,63 |
0,04 |
|
|
|
0,02 |
|
|
13,56 |
|
107,80 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
13,52 |
|
|
107,78 |
|
|
|
|
|
561,42 |
|
706,40 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
47,68 |
0,02 |
|
|
|
0,01 |
|
|
–41,42 |
|
23,60 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
–41,44 |
|
23,59 |
|
|
|
|
|
520,00 |
|
730,00 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
=–0,23 |
|
=–0,10 |
|
|
|
|
=0 |
|
|
=0 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
f X = –0,23; |
fY = –0,10; |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
fабс |
f X2 |
fY2 |
|
0,23 2 |
0,10 2 0,25; |
1 |
|
|||||||||||||
|
fотносит |
|
fабс |
|
0,25 |
|
|
|
|
1 |
|
; P = 564,95; |
fдоп = |
; |
|||||||
|
|
564,95 |
2259 |
2000 |
|||||||||||||||||
|
|
|
P |
|
|
|
|
|
|
||||||||||||
fотносит fдоп.
161
Распределение угловой невязки на измеренные углы. Поправка равна +0,5 . Ее величина прибавляется к измеренному горизонтальному углу:
1 72 21,5 0,5 72 22;2 112 29,5 0,5 112 30;5 161 58,5 0,5 161 59.
Контроль этапа
исправ =72 22 + 101 26 + 91 43 + 112 30 + 161 59 = 540 .
Все результаты вычислений заносятся в таблицу «Ведомость вычисления координат» (см. табл. 7.8).
7.2.5.2. Вычисление дирекционных углов
По известному дирекционному углу исходной стороны 1–2 ( 1-2) и по исправленным горизонтальным углам испр вычисляются дирекционные углы остальных сторон теодолитного хода по формулам для правых горизонтальных углов:
n 1 n 180 испр – дирекционный угол последующей сто-
роны равен дирекционному углу предыдущей стороны плюс 180 и
минус исправленный горизонтальный угол правый по ходу.
Величина дирекционного угла не может превышать 360 и быть меньше 0 . Если величина дирекционного угла больше 360 , то из результата вычислений необходимо вычесть 360 (см. пример).
Для горизонтальных углов, лежащих слева по ходу, формула вычисления дирекционных углов имеет вид:
n 1 n 180 испр .
Дирекционный угол исходной стороны 1–2 вычисляется по измеренному магнитному азимуту (п. 7.1.2.1).
Контроль вычисления дирекционных углов. В замкнутом теодолитном ходе в результате вычислений получается дирекционный угол исходной стороны.
Пример вычисления дирекционных углов.
Дирекционный угол исходной стороны 1-2 равен 168 22 . В нашем примере измерены правые по ходу углы.
2-3 = 1-2 + 180 – 2 = 168 22 + 180 – 72 22 = 276 00 ;3-4 = 2-3 + 180 – 3 = 276 00 + 180 – 101 26 = 354 34 ;
162
4-5 |
= 3-4 |
+ 180 – 4 |
= 354 34 + 180 – 91 43 = 442 51 – |
360 =82 51 ; |
|
|
|
5-1 |
= 4-5 |
+ 180 – 5 |
= 82 51 + 180 – 112 30 = 150 21 ; |
1-2 |
= 5-1 |
+ 180 – 1 |
= 150 21 + 180 – 161 59 = 168 22 . |
При вычислении дирекционного угла получилось значение 442 51 . Из полученного значения вычитается 360 :
442 5 1 360 82 51 .
Контроль вычисления дирекционных углов получился.
Все результаты вычислений заносятся в таблицу «Ведомость вычисления координат» (см. табл. 7.8).
7.2.5.3. Вычисление приращений координат
Вычисление приращений координат выполняется по формулам:
X d cos ; |
Y d sin , |
где d – горизонтальное проложение (длина) линии; – дирекционный угол этой линии.
Приращения координат вычисляются с точностью два знака после запятой.
Пример вычисления приращений координат:
1–2: X = 126,68 cos 168 22 = –124,08; |
Y = 126,68 sin168 22 =25,54; |
|
2–3: X = 144,81 cos 276 00 = 15,14; |
Y |
=144,81 sin276 00 = – |
144,02; |
|
|
3–4: X = 137,24 cos 354 34 = 136,63; |
Y =137,24 sin354 34 = –12,99; |
|
4–5: X = 108,63 cos 82 51 = 13,52; |
Y =108,63 sin82 51 = 107,78; |
|
5–1: X = 47,68 cos 150 21 = –41,44; |
Y = 47,68 sin150 21 = 23,59. |
|
Все результаты вычисления заносятся в табл. 7.8. Пример вычисления тригонометрических функций на калькуляторе приведен в прил. 1 и 2.
7.2.5.4. Уравнивание приращений координат
Уравнивание линейных измерений выполняется по осям Х и Y. Разность между суммой вычисленных приращений координат и теоретической суммой называется линейной невязкой хода и обозначается fХ и fY. Линейная невязка вычисляется по формулам:
f X X X теор; |
fY Y Yтеор . |
163

Теоретическая сумма приращений координат зависит от геометрии хода. В замкнутом теодолитном ходе она равна нулю, тогда невязка хода равна
f X X ; |
fY Y . |
Прежде чем распределять невязки в приращения координат, необходимо убедиться в их допустимости. Для чего вычисляется абсолютная невязка хода fабс
fабс  f X2 fY2
f X2 fY2
и относительная
fотн fPабс ,
где Р – периметр хода (сумма длин сторон), м.
Относительная невязка сравнивается с допустимой fдопуст 20001
или fдопуст |
|
1 |
. |
|
1000 |
||||
|
|
|||
Если вычисленная относительная невязка больше допустимой fотн 20001 , проверяются вычисления в п. 2.5.3 и 2.5.4. Если неравен-
ство повторилось, то заново измеряются длины линий.
В случае, когда полученная относительная невязка допустима, т.е. fотн 20001 , вычисляются поправки в приращения координат пропорци-
онально длинам сторон. Невязки распределяются с обратным знаком пропорционально длинам сторон.
Поправки в приращения координат X и Y вычисляются с округлением до 0,01 м по формулам:
X |
|
f X |
di ; |
Y |
fY |
di , |
|
|
|||||
|
|
P |
|
P |
||
где X и Y – поправки в приращения по оси Х и Y, соответственно, м; fX и fY – невязки по осям, м; Р – периметр (сумма сторон), м; di – измеренная длина (горизонтальное проложение), м.
Знак у поправки противоположен знаку невязки.
После вычисления поправок следует сделать проверку, т.е. сложить все поправки. Если их сумма будет равна невязке с обратным знаком, то распределение невязки выполнено правильно:
X f X |
и Y fY . |
164

Вычисляются исправленные приращения.
Полученные поправки алгебраически прибавляются к соответствующим приращениям и получаются исправленные приращения:
X испр X вычисл X ; |
Yиспр Yвычисл Y . |
Контроль: сумма исправленных приращений в замкнутом теодолитном ходе должна равняться нулю, т.е. должно выполняться равенство:
X испр 0 и Yиспр 0.
Пример вычисления линейной невязки:
fX =(–124,08)+ 15,14+136,63+ 13,52+(–41,44) = –0,23; fY = 25,54+(–144,02) + (–12,99)+107,78 +23,59 = –0,10;
fабс |
|
fx2 |
f y2 |
|
0,23 2 0,10 2 0,25; |
|
||||||
fотн |
1 |
|
0,25 |
|
|
|
1 |
|
, |
fдоп = |
1 |
; |
|
564,94 |
2259 |
2000 |
|||||||||
|
P |
|
|
|
|
|||||||
т. о., относительная невязка меньше допустимой и невязкиfX и fY |
||||||||||||
можно распределять на приращения координат. |
|
|||||||||||
Пример вычисления величины поправок: |
|
|
||||||||||
1–2: X = (0,23/ 564,94) 126,68=0,05; |
Y =(0,10/564,94) 126,68=0,02; |
|||||||||||
2–3: X = (0,23/ 564,94) 144,71=0,06; |
Y =(0,10/ 564,94) 144,71=0,03; |
|||||||||||
3–4: X = (0,23/ 564,94) 137,24=0,06; |
Y =(0,10/ 564,94) 137,24=0,02; |
|||||||||||
4–5: X = (0,23/ 564,94) 108,63=0,04; |
Y =(0,10/ 564,94) 108,63=0,02; |
|||||||||||
5–1: X = (0,23/ 564,94) 47,68 |
=0,02; |
Y =(0,10/ 564,94) 47,68=0,01. |
||||||||||
Контроль |
|
|
|
|
=0,23 |
|
|
=0,10 |
||||
Пример вычисления исправленных приращений координат: |
||||||||||||
X испр X вычисл X ; |
Yиспр Yвычисл Y . |
|
||||||||||
Вычисляются исправленные приращения координат: |
||||||||||||
1–2: Xиспр = –124,08 +0,05= –124,03; |
Yиспр = 25,54 +0,02= 25,56; |
|||||||||||
2–3: Xиспр = 15,14+ 0,06 = 15,20; |
Yиспр =(–144,02)+0,03= –143,99; |
|||||||||||
3–4: Xиспр = 136,63 + 0,06 = 136,69; |
Yиспр =(-12,99) +0,02= – 12,97; |
|||||||||||
4–5: Xиспр = 13,52 + 0,04 = 13,56; |
Yиспр = 107,78+ 0,02= 107,80; |
|||||||||||
5–1: Xиспр = –41,44 + 0,02 = –41,42; |
Yиспр = 23,59 + 0,01 = 23,60. |
|||||||||||
165
Контроль:
Xиспр = (–124,03)+15,20 +136,69+13,56+(–41,42) = 0;
Yиспр = 25,56+(–143,99)+( –12,97)+107,80+23,60 = 0.
Сумма исправленных приращений равна нулю, т.е. контроль выполняется.
7.2.5.5. Вычисление координат точек теодолитного хода
Если контроль вычисления и распределения линейной невязки выполняется, то вычисляются координаты всех точек хода по формулам:
X n 1 X n X испр; |
Yn 1 Yn Yиспр – координата последующей |
точки равна координате предыдущей точки плюс исправленное приращение.
Контроль вычисления координат: в результате последовательного вычисления координат точек замкнутого теодолитного хода получаются координаты исходной точки.
Пример вычисления координат точек теодолитного хода:
т. 2: 520,00 – 124,03 = 395,97; |
730,00 |
+ 25,56 = 755,56; |
||
т. 3: 395,97 |
+15,20 = 411,17; |
755,56 |
– 143,99 = 611,57; |
|
т. 4: 411,17 |
+ 136,69 = 547,86; |
611,57 |
– 12,97 = 598,60; |
|
т. 5: |
547,86 |
+ 13,56 = 561,42; |
598,56 |
+ 107,80 = 706,40; |
т. 1: |
561,42 – 41,42 = 520,00; |
706,40 |
+ 23,60 = 730,00. |
|
Контроль вычисления координат точек теодолитного хода получился.
7.3. Построение плана «Планово-высотного обоснования»
План теодолитного хода строится на листе ватмана формата А4 (А3) в масштабе 1:2000.
Сначала строится координатная сетка. Ее размеры 10 10 см, ось абсцисс (Х) направлена по вертикали, ось ординат (Y) слева направо.
166
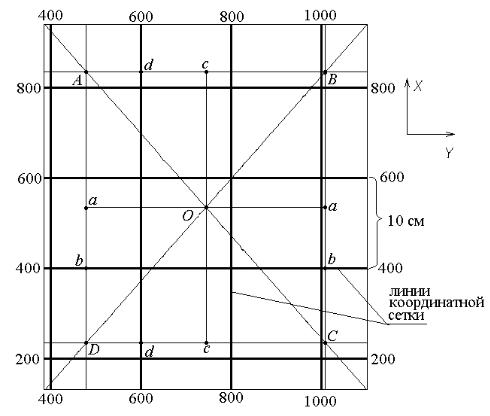
7.3.1. Построение координатной сетки
Формат располагается вертикально. На листе проводятся диагонали очень тонкими линиями, чтобы потом их не убирать, т.к. они являются вспомогательным построением. От точки пересечения диагоналей откладываются отрезки произвольной длины, но одинаковые на все четыре стороны. Через полученные точки A, B, C, D вспомогательными линиями строится прямоугольник. Стороны прямоугольника делятся пополам и полученные точки обозначаются буквами: a–a и c–c (см. рис.7.7).
Из ведомости вычисления координат выбираются максимальное и минимальное значения координат по оси Х и Y и вычисляются средние значения
Хср = 0,5(Хmax+Хmin); |
Yср = 0,5(Ymax+Ymin). |
Например: |
|
Хср = 0,5(395,97+561,42)= 478,69; |
Yср = 0,5(755,56+598,60)=677,08 |
Рис. 7.7. Построение координатной сетки
От точек a строятся вниз отрезки 78,69 м с учетом масштаба (478,69 – 400 = 78,69 м). Через полученные точки b и b проводится координатная линия со значением 400. От координатной линии со значением 400 вверх и вниз строятся отрезки по 10 см. Через вновь полученные точки проводятся координатные линии. Оцифровка координатных ли-
167

ний вверх увеличивается на +200 м, вниз уменьшается на –200 м для масштаба 1:2000.
Аналогичные построения проводятся по оси Y. Влево от точек с строятся отрезки 77,04 м (677,08 – 600 = 77,08 м), через полученные точки d проводится координатная линия со значением 600. От нее влево и вправо на расстоянии 10 см проводятся координатные линии (рис. 7.7).
7.3.2. Нанесение точек теодолитного хода на план
Точки теодолитного хода наносятся на план по координатам Х и Y с помощью измерителя и линейки. Определяется квадрат, в котором будет находится данная точка.
Например, координаты точки 1 равны Х1 = 520,00 м; Y1 = 730,00 м. Для точки 1 вычисляются отрезки q1= Х1 – 400 = 520,00 – 400 = 120,00 м. Число 400 – это координата южной линии координатной сетки
квадрата, в котором находится точка 1.
На сторонах квадрата от координатной линии 400 слева и справа строятся отрезки g1 длиной 120,00 м с учетом масштаба и ставятся точки k и m (рис. 7.8). К точкам k и m прикладывается линейка и по ее направлению строится отрезок длиной f1 = Y1 – 600 = 730,00 – 600 = 130,00 м с учетом масштаба.
Рис. 7.8. Нанесение точек теодолитного хода на план
168
Число 600 – координата западной линии координатной сетки квадрата, в котором находится точка 1.
Точка 2 имеет координаты:
Х2 = 395,97 м; Y2 = 755,56 м.
Отрезки для построения т.2:
q2= Х2 – 200 = 395,97 – 200 = 195,97 м; f2 = Y2 – 600 = 755,56 – 600 = 155,56 м.
Аналогично строятся другие точки.
Контроль построения точек теодолитного хода. Правильность нанесения точек теодолитного хода на план проверяется следующим образом: измеряются расстояния между точками на плане и сравниваются эти значения с длиной из «Ведомости вычисления координат» (табл. 8).
П = dисх – dплан,
где П – погрешность между длинами линий, м; dисх, dплан – длины линий, соответственно исходная и измеренная на плане, м.
Допустимая погрешность графических построений составляет 0,3 мм от масштаба плана и зависит от точности масштаба. Для масштаба 1:2000 точность равна 0,2 м, тогда допустимая величина погрешности равна 0,6 м.
Построение точек теодолитного хода проверяется также по дирекционным углам линий.
Окончательно оформленный план показан на рис.7.9.
169
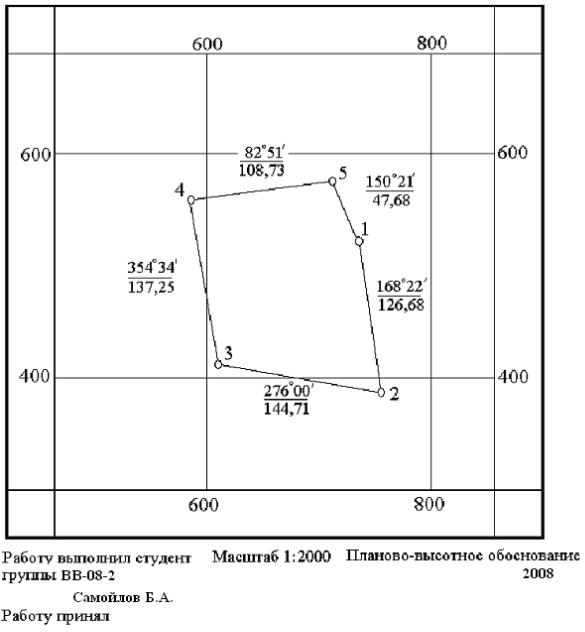
Рис. 7.9. Планово-высотное обоснование (теодолитно-высотный ход)
7.4. Вычисление отметок реечных точек (камеральная обработка тахеометрической съемки)
При съемке реечных точек измеряются расстояния нитяным дальномером, горизонтальные и вертикальные углы. Результаты измерений приведены в табл. 7.4, вычисления в табл. 7.10. Значение горизонтального угла на реечную точку принимается равным отсчету по горизонтальному кругу, т.к. ориентирование на заднюю станцию выполнено при отсчете 0 00 .
170