

2.3. Скорость
Пусть
элементарное перемещение
произошло за время
![]() .
Отношение
.
Отношение
![]() - величина, в общем случае, непостоянная,
зависящая от
- величина, в общем случае, непостоянная,
зависящая от
![]() .
Если
.
Если
![]() уменьшать, то отношение
уменьшать, то отношение
![]() также будет меняться. При дальнейшем
уменьшении
,
мы обнаружим, что отношение
перестанет сколь угодно заметно меняться,
т.е. устремиться к некоторому предельному
значению. Этот предел
также будет меняться. При дальнейшем
уменьшении
,
мы обнаружим, что отношение
перестанет сколь угодно заметно меняться,
т.е. устремиться к некоторому предельному
значению. Этот предел
![]() - есть линейная
скорость точки.
- есть линейная
скорость точки.
Этот вектор носит также название вектора истинной или мгновенной скорости в некоторой точке А (при стремлении В к А) (рис. 4).
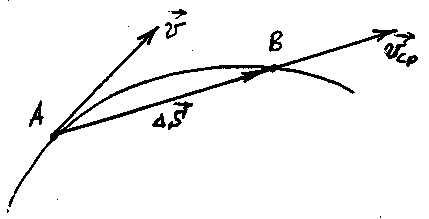
Рис. 4
![]()
![]() ,
,
где
![]() - вектор средней скорости.
- вектор средней скорости.
Вектор скорости, как и всякий вектор, можно задавать тремя компонентами по осям координат:
![]() (2.2)
(2.2)
где
α, β, γ – углы вектора
![]() с осями координат.
с осями координат.
Принимая во внимание (2.1) найдем:
![]() (2.3)
(2.3)
Т.е. компоненты вектора скорости выражаются производными по времени от соответствующих координат точки.
Если известен вид функций, выражающих зависимости координат точки от времени, то компоненты скорости мы получим, дифференцируя эти функции по времени.
Наоборот, если известно, или компоненты скорости точки зависят от времени, то при помощи обратной операции – интегрирования – мы можем найти вид функций, выражающих зависимость координат от времени. При этом в результате интегрирования мы получим функции, содержащие по одной произвольной постоянной (постоянной интегрирования). Чтобы определить эти произвольные постоянные и иметь возможность находить в любой момент времени, необходимо знать значения координат для какого-либо определенного момента времени.
Пусть,
например, известно, что компонента
скорости по координате
![]() постоянна
и равна
постоянна
и равна
![]() ,
т.е.
,
т.е.
![]()
![]()
![]() (2.4)
(2.4)
где С – постоянная интегрирования.
Если
в момент времени
![]() координата
координата
![]() ,
то, подставляя эти значения в (2.4), найдем:
,
то, подставляя эти значения в (2.4), найдем:
![]()
Следовательно
![]()
2.4. Ускорение
При движении точки скорость ее может меняться и по величине и по направлению.
Пусть
векторы
![]() и
и
![]() изображают скорость точки соответственно
в момент
изображают скорость точки соответственно
в момент
![]() и
и
![]() .
Изменение скорости за промежуток времени
.
Изменение скорости за промежуток времени
![]() ,
есть вектор
,
есть вектор
![]() (рис. 5).
(рис. 5).
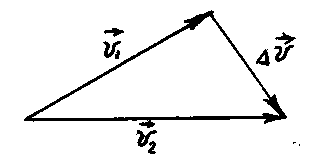
Рис. 5
Вектор
![]() может менять величину и направление в
зависимости от
.
может менять величину и направление в
зависимости от
.
Если
![]() ,
то
,
то
![]() - линейное ускорение точки.
- линейное ускорение точки.
Этот вектор носит также название мгновенного ускорения.
![]() (2.5)
(2.5)
 (2.6)
(2.6)
Если нам известен вид функций, выражающих зависимость координат от времени, то двукратным дифференцированием их мы найдем компоненты вектора ускорения, а вместе с тем его величину и направление.
Наоборот, если известен вид функций, выражающих зависимость компонент ускорения от времени, то обратной операцией – интегрированием – мы найдем функции, выражающие зависимость координат от времени.
Пусть,
например, тело движется в направлении
оси Х с постоянным ускорением
![]() :
:
![]() (2.7)
(2.7)
![]()
![]() (2.8)
(2.8)
![]()
![]()
![]() (2.9)
(2.9)
Если при
![]() то,
подставив
то,
подставив
![]() ,
,
![]() в (2.8) найдем :
в (2.8) найдем :
![]()
Подставляя найденное
значение
![]() и
в (2.9) найдем:
и
в (2.9) найдем:
![]()
Таким образом
![]() (2.10)
(2.10)
Обычно в задачах механики бывают известны координаты и скорость точки в один и тот же момент времени, который принимается за начальный момент рассматриваемого движения. Поэтому известные значения координат и скорости в какой-либо определенный момент времени называют начальными условиями.
Таким образом, для полного описания движения точки достаточно, определить ускорения, которые испытывает точка каждый момент времени, и знать начальные условия.
Так как вектор ускорения не совпадает по направлению с вектором скорости, ускорение может быть разложено на две компоненты: в направлении скорости и в перпендикулярном направлении.
Рассмотрим плоское
движение точки. Разложим вектор ускорения
на две составляющие: тангенциальную
![]() ,
совпадающую с направлением скорости
и
,
совпадающую с направлением скорости
и
![]() ,
перпендикулярную к вектору скорости
(рис. 6).
,
перпендикулярную к вектору скорости
(рис. 6).
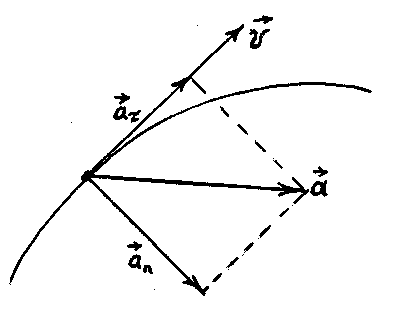
Рис. 6
Тангенциальная компонента ускорения изменяет только величину скорости, а нормальная – только ее направления.
![]() (2.11)
(2.11)
Найдем величину нормального ускорения. Рассмотрим рис. 7.
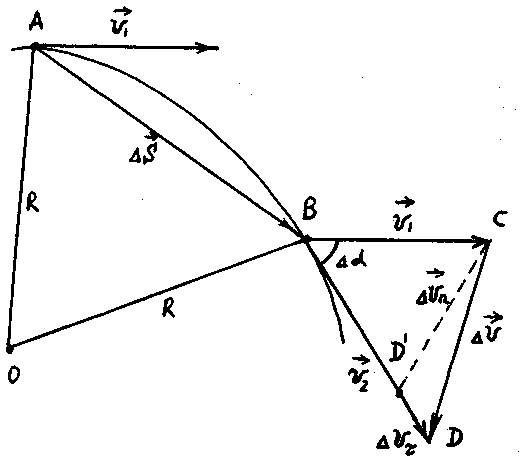
Рис. 7
Устремим
к
нулю. Тогда малая дуга
![]() будет практически отрезком окружности.
Восстановим перпендикуляр к касательным
в точке А и в точке В до их пересечения.
Тогда
будет практически отрезком окружности.
Восстановим перпендикуляр к касательным
в точке А и в точке В до их пересечения.
Тогда
![]() ,
,
![]()
![]()
![]() носит название
радиуса
кривизны
траектории. Величина, обратная радиусу
кривизны,
носит название
радиуса
кривизны
траектории. Величина, обратная радиусу
кривизны,
![]()
называется соответственно кривизной траектории в данной точке.
На BD
отложим отрезок
![]()
Δ ОАВ и ΔВСD/ равнобедренны и подобные.
Отсюда:![]()
Таким образом:
![]()
Итак, имеем:
![]() (2.12)
(2.12)
![]() (2.13)
(2.13)