

Глава 2. Кинематика
2.1. Пространственно-временные системы отсчета
Для описания движения тел нужно, прежде всего, установить способ определения положения тела и способ отсчета момента времени, в который тело занимает это определенное положение. Описание движений без рассмотрения причин, их вызывающих, составляет предмет кинематики.
Положение тела определяется по отношению к каким-либо другим телам, поэтому и движение тела рассматривается только относительно других тел, которые служат для определения положения данного тела.
Тела, относительно которых рассматривается движение, называются телами отсчета.
Для описания движений на Земле в качестве такой системы отсчета обычно выбирают Землю или какие-либо тела, неподвижные относительно земли.
По отношению к разным системам отсчета одни и те же тела совершают различные движения. С точки зрения кинематики все системы отсчета равноправны.
После того как выбраны тела отсчета, с ними обычно связывают какую-либо систему координат, например прямоугольную (декартову) и определяют положение каждой точки двигающегося тела тремя координатами в выборной системе координат. Кроме того, устанавливают способ определения моментов времени, в которые те или иные точки двигающегося тела занимает известное положение.
2.2. Элементарное перемещение точки
Если точка движется, то ее положение относительно системы отсчета меняется со временем. Таким образом, координаты движущейся точки являются функциями времени. Однако конкретными условиями задачи определяется не вид этих функций, а вид функций определяющих ускорение или скорость движущейся точки. Чтобы установить связь между координатами точки, её скоростью и ускорением, нужно ввести представление об элементарном перемещении точки.
Если при движении по какой-либо траектории точка переместились из А в В, то перемещение точки - есть отрезок АВ (рис. 2).
Если точка затем переместилась из В в С, то это второе перемещение есть отрезок ВС. Результирующее перемещение – отрезок АС, представляющий собой диагональ параллелограмма, построенного на соответствующих перемещениях.
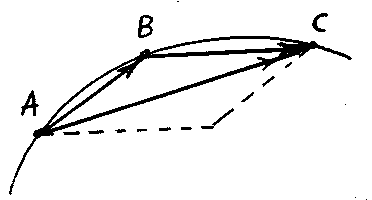
Рис. 2
Следовательно, отрезки, представляющие перемещения, складываются геометрически (по правилу параллелограмма). Такие величины, которые подобно перемещениям, характеризуются не только значением величины, но и определенным направлением в пространстве и складываются геометрически, называются векторными величинами или векторами.
Таким образом, перемещение точки – вектор.
![]()
Всякое перемещение мы можем изображать в виде суммы каких-либо составляющих перемещений бесчисленным числом способов. Однако при заданных направлениях всех составляющих перемещений задача становится однозначной.
Всякий вектор можно задавать тремя скалярными величинами: тремя компонентами по осям координат (рис. 3)
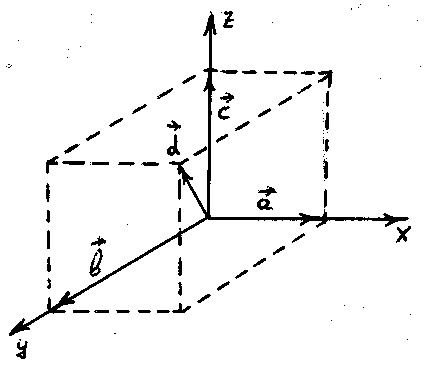
Рис. 3
![]()
Если
вектор
![]() образует с осями координат x,y,z углы
образует с осями координат x,y,z углы![]() , то
, то
![]()
где
![]() - абсолютная величина вектора
- абсолютная величина вектора
![]()
В общем случае вектор перемещения не совпадает с участком траектории, которую описала двигающаяся точка при данном перемещении (т.к. траектория может быть криволинейной).
Если взять достаточно малое перемещение, то можно заменить малый участок траектории её хордой и считать, что вектор перемещения совпадает с соответствующим участком траектории.
Такое
достаточно малое перемещение
![]() называется элементарным
перемещением.
Если компоненты этого вектора по трем
осям x,y,z,
соответственно равны
называется элементарным
перемещением.
Если компоненты этого вектора по трем
осям x,y,z,
соответственно равны
![]() то абсолютная
величина вектора
то абсолютная
величина вектора
![]()
Если вектор образует с осями координат углы α, β, γ, то
![]() (2.1)
(2.1)