

Решение неполной проблемы собственных значений при исследовании колебаний многомерных пространственных оболочечно-стержневых конструкций
Большое число объектов, применяемых в авиастроении, выполнено в виде пространственных тонкостенных конструкций, усиленных профилями для обеспечения необходимой прочности и жесткости. Проектирование таких конструкций необходимо вести не только с учетом статического приложения нагрузок, предусмотренных нормами испытаний, а также исследовать их динамические состояния, определяя низшие частоты и формы собственных колебаний.
Дискретное моделирование тонкостенных конструкций указанного класса ведется методом конечных элементов [10]. Формирование математической модели, достаточно подробно описывающей топологию исследуемого объекта, требует введения большого числа узлов и конечных элементов. Тонкостенные конструкции моделируются пластинчатыми элементами треугольной и прямоугольной формы с узлами в вершинах. Для снижения общего числа степеней свободы силовой каркас моделируется стержневыми (балочными) элементами, узлы которых воспринимают крутящие и изгибающие моменты, а также растягивающие или сжимающие усилия.
Проблема заключается в необходимости исследования неполной проблемы собственных значений многомерных пространственных оболочечно-стержневых конструкций.
Постановка задачи предусматривает исследование низших частот и форм собственных колебаний линейно-упругой тонкостенной пространственной конструкции, усиленной стержневыми элементами, наделенными соответствующими геометрическими характеристиками.
В настоящее время не существует единого алгоритма решения проблемы собственных значений, одинаково эффективного для самых разнообразных технических объектов.
Выбор метода решения зависит от характеристик матриц жесткости и инертности, их размерности и ленточности, а также от числа искомых собственных значений. При вычислении наименьших собственных значений и соответствующих собственных векторов систем высокой размерности с большой шириной ленты весьма эффективен метод итераций в подпространстве [11]. Использование компактных форм представления матриц жесткости и инертности обеспечивает возможность решения систем уравнений высоких порядков в оперативной памяти компьютера.
Достоинством этого метода является и возможность определить на сравнительно ранней стадии решения обусловленность матриц жесткости и инертности. Ошибки в исходных данных могут привести к тому, что матрица жесткости не будет положительно определенной, что выявляется при факторизации матрицы, до начала проведения итераций.
Основной целью метода итераций в подпространстве является одновременное вычисление p наименьших собственных значений и соответствующих собственных векторов, удовлетворяющих соотношению:
[] ,
где [] - диагональная матрица собственных значений,
[] =diag(I) (I=1,2,…,p), [1,2,…,p] -- матрица собственных векторов.
Вычислительная процедура метода одновременных итераций включает в себя следующие этапы.
Выполняется преобразование базиса Ek в Ek+1 для k=1,2,…n по формуле:
k+1k .
Определяют проекции матриц жесткости и инертности в новом базисе k+1:
k+1k+1TK+1,
k+1k+1TK+1,
для которых на каждом (k+1) – шаге решается вспомогательная задача на собственные значения обобщенным методом Якоби:
k+1Qk+1k+1Qk+1k+1.
Улучшенные приближения к собственным векторам находят из соотношения:
Xk+1k+1Qk+1.
Полагая, что векторы из X1 не ортогональны ни к одному из искомых собственных векторов, в пределе л+1 и k+1 при k.
Описанный метод применен при определении шести низших частот и форм собственных колебаний пространственной тонкостенной конструкции гофрированного авиационного контейнера.
Конструктивная модель авиационного контейнера АК-1.5, выполненного из листового дюралюминия и исследуемого в данной работе на основе изложенного подхода, представлена на рисунке 91.
Согласно официально утвержденным нормам на статические испытания авиационных контейнеров рассматриваемого типа их работоспособность считается обеспеченной, если конструкция контейнера остается прочной и жесткой под действием вариантов нагружений, схематично указанных на рисунке 92.
Численное моделирование полей деформаций (узловых перемещений) и напряжений проведено на базе объединенного ансамбля конечных элементов оболочечного типа и одномерных стержней (рисунки 93, 94). Узлы всех элементов имеют по 6 степеней свободы, соответствующих указанным выше типам учитываемых деформаций упругих пластин и стержней (рисунок 95).
Всего в принятом объединенном ансамбле насчитывается 12 633 узла, что составляет 75 798 узловых степеней свободы.
Конечноэлементная модель исследуемого контейнера имеет 12633 узла, образующих сетку из 10369 пластинчатых конечных элементов прямоугольной формы и 4668 пластинчатых элементов треугольной формы; в качестве элементов усиления использованы 1118 балочных элементов, а для моделирования петель навески дверей использованы 60 стержневых элемента. Размерность глобальных матриц жесткости и инертности равна 75798 при ширине ленты 1824.
Процедура численного моделирования (Pentium 4) включает несколько этапов для обеспечения возможности контроля параметров вычислений. Наиболее продолжительными являются этапы формирования глобальных матриц жесткости и инертности в ленточной форме (20 мин.), а также итерационный процесс вычисления собственных значений и соответствующих собственных векторов (42 мин.). В результате решения определены шесть низших собственных частот и соответствующих векторов (на рис. 96– 98 представлены некоторые из них).
Описанный алгоритм позволяет эффективно определять частоты и формы собственных колебаний многомерных пространственных тонкостенных конструкций.

Рисунок 91 – Конструктивная модель авиационного контейнера АК-1,5 (дверь контейнера условно отделена от корпуса)

Рисунок 92 – Варианты нагружения контейнера в процессе статических испытаний (при проектных закреплениях днища)

Рисунок 93 – Объединенный ансамбль конечных элементов пластинчато-стержневой системы исследуемого контейнера

Рисунок 94 – Схема расположения стержневых элементов в пространственной конструкции контейнера

Рисунок 95 – Деформированное состояние контейнера при статических испытаниях
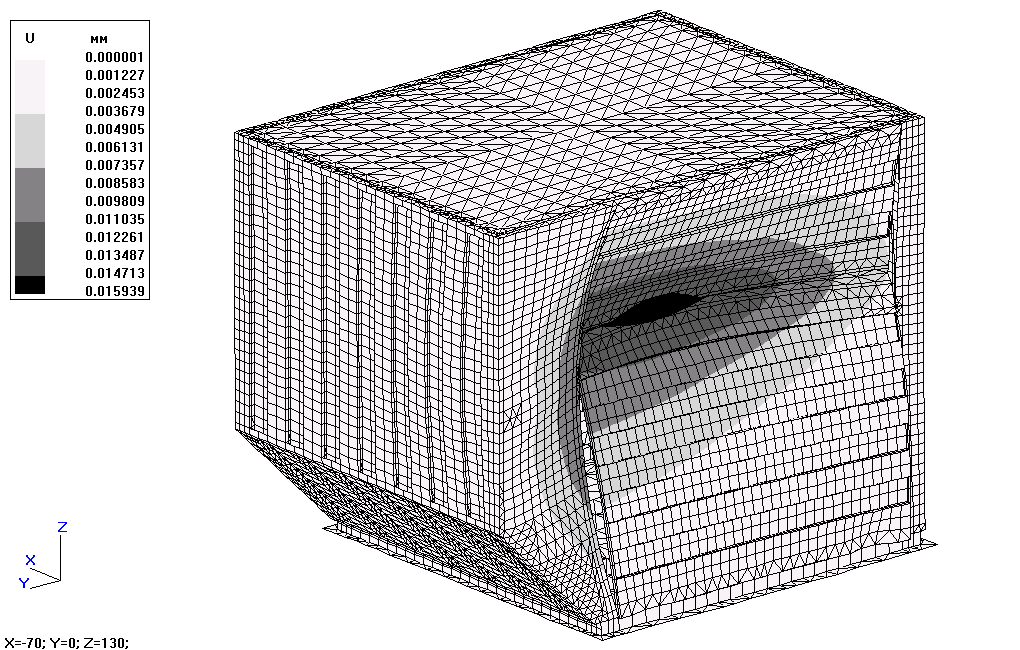
Рисунок 96 – Низшая форма собственных колебаний с частотой 1=9 –70819110-3 Гц

Рисунок 97 – Низшая форма собственных колебаний с частотой 2=1 –82286610-2 Гц

Рисунок 98 – Низшая форма собственных колебаний с частотой 4=2 –49749610-2 Гц