

3.4.3. Цифровые телеизмерительные системы
В цифровых ТИС, называемых еще кодоимпульсными системами, значение измеряемой величины передается по линии связи кодовой комбинацией в виде комбинации импульсов.
Наиболее часто применяется двоичный код, который на принимающей стороне преобразуется в единично-десятичный код, более удобный для цифрового воспроизведения измеряемой величины. Помехи в линии связи могут привести к искажению кода, а следовательно, и к погрешности измерения. Чтобы повысить помехозащищенность ТИС, применяют специальные коды - коды с обнаружением и исправлением ошибок, вызванных помехами. Принцип построения таких кодов базируется на создании избыточности кодовых комбинаций, и из всех возможных кодовых комбинаций выбирается та часть, которая подчиняется определенному закону. Остальные комбинации считаются запрещенными. Это позволяет исключить некоторые кодовые комбинации, подвергшиеся действию помех. При таком построении кодов может быть выявлена лишь часть ошибок, так как не исключена возможность перехода под действием помех одной разрешенной комбинации в другую разрешенную комбинацию.
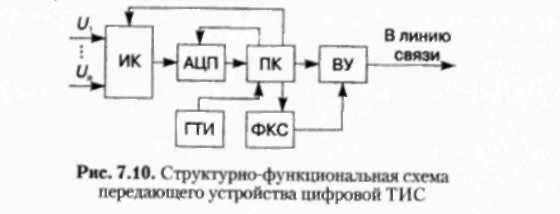
Рис. 3.10. Структурно-функциональная схема
передающего устройства
На рисунке 3.10 приведена структурная схема передающего устройства цифровой ТИС. Унифицированные сигналы, например, напряжения Ui, ..., Un от измерительных преобразователей (на схеме не показаны) поступают на входы измерительного коммутатора И К, поочередно подключающего эти сигналы к аналого-цифровому преобразователю АЦП. Параллельный код с выхода АЦП подается на преобразователь ПК параллельного кода в последовательный, который управляет также (формирователем контрольных символов ФКС для образования помехозащищенного кода и переводит ИК в следующее положение, а также формирует так называемую синхросерию - код, используемый для цикловой синхронизации приемника. Частоту опроса измеряемых величин задает генератор тактовых импульсов ГТИ. Последовательный код от ИK и ФКС через выходное устройство ВУ поступает в линию связи.
Приемное устройство цифровой ТИС в качестве средств представления информации может содержать либо аналоговые приборы (столько, сколько измеряемых величии), либо цифровые приборы и регистраторы. При использовании аналоговых приборов приемное устройство ТИС проще. На рисунке 3.11 приведена возможная структурная схема такого приемника. Код с линии связи поступает во входное устройство ВУ', в котором восстанавливаются импульсы кода, искаженные в линии связи. Из устройства ВУ' кодовые сигналы поступают в преобразователь ПК последовательного кода в параллельный и через запоминающие регистры (Рг1, ..., Ргn) - на цифроаналоговые преобразователи ЦАП1, ..., ЦАПn. Выходные сигналы ЦАП поступают на приборы П1, ..., Пn. Узел цифровой синхронизации ЦС выделяет синхроимпульсы и устанавливает распределитель каналов РК в исходное положение, которое поочередно разрешает запись в регистры Рг1, ..., Ргn синхронно и синфазно с измерительным коммутатором передающего устройства, поскольку генератор тактовых импульсов ГТИ синхронизирован блоком внутрицикловой синхронизации ВЦС С генератором передающего устройства. При поступлении из линии связи неискаженной кодовой комбинации устройство контроля УК выдает сигнал разрешения на все регистры Рг1, ..., Ргn но записывается код только в тот регистр, на который подан разрешающий сигнал с РК.

Рис. 3.11. Структурно-функциональная схема
принимающего устройства
Наиболее существенные достоинства цифровых ТИС — высокие метрологические характеристики, возможность работы по различным каналам связи, высокая помехозащищенность и возможность вывода информации в ЭВМ. Относительная сложность - недостаток цифровых ТИС.