

3.4.2. Телеизмерительные системы автоматического контроля
В различных областях науки и техники возникает необходимость проводить измерения на объектах, находящихся на значительном расстоянии от средств представления или последующей обработки информации (например, с помощью ЭВМ). Такая необходимость возникает при измерениях параметров движущихся объектов, объектов, рассредоточенных по площади (большие промышленные предприятия, газо- и нефтепроводы), а также при измерении параметров объектов, непосредственное нахождение человека около которых невозможно (например, возле объектов атомной энергетики). Все эти, а также многие другие задачи решают телеизмерительные системы (ТИС).
Отличие ТИС от измерительных систем ближнего действия заключается в наличии у ТИС специального канала связи. Под каналом связи понимают совокупность технических средств, необходимых для передачи информации от различных источников. Одна из основных частей канала связи — линия связи, т.е. физическая среда, по которой передается информация на значительное расстояние. Различают проводные линии связи, радиолинии, гидроакустические и оптические линии связи. Основная характеристика канала связи — полоса пропускания частот, которая зависит от вида канала связи и наличия помех.
В многоканальных ТИС необходимо объединять многие сигналы-переносчики измерительной информации в единый сигнал, передаваемый по каналу связи и несущий информацию обо всех измеряемых величинах. Это объединение осуществляют специальные каналообразующие устройства.
При передаче по каналу связи единого сигнала на него действуют различные помехи и, кроме того, параметры самой линии не остаются постоянными, а изменяются под воздействием внешних факторов. Поэтому в ТИС появляется погрешность передачи измеряемых величин по линии связи.
Для уменьшения этой погрешности сигналы измерительной информации подвергают в ТИС дополнительным преобразованиям (модуляции и кодированию), что отличает ТИС от системы ближнего действия. При этом на принимающей стороне ТИС осуществляются обратные преобразования — демодуляция и декодирование.
Обобщенная структурно-функциональная схема ТИС представлена на рис. 3.7.
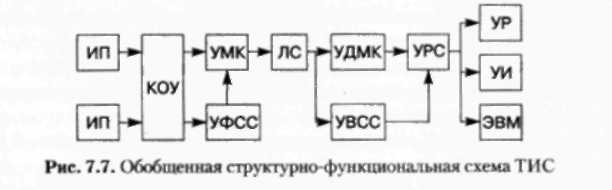
Рис. 3.7. Обобщенная структурно-функциональная схема ТИС
Для передачи информации от нескольких источников но одной линии связи применяют различные принципы разделения каналов. Наиболее часто используют временное и частотное разделение каналов.
При временном разделении происходит последовательная передача по линии связи значений измеряемых величин. В таких ТИС разделение измерительных каналов проводят с помощью коммутаторов. Структурная схема ТИС с временным разделением каналов (ВРК) представлена на рис. 3.8. Унифицированный сигнал от измерительных преобразователей ИП поступает на входы измерительного коммутатора ИК1 передающей части ТИС и далее по очереди поступает на модулятор М, где происходит преобразование унифицированного сигнала в промежуточный параметр, при котором обеспечиваются наименьшие погрешности, возникающие в результате непостоянства параметров линии связи и помех. Измерительный коммутатор ИК1 переключается генератором тактовых импульсов IT И.

Рис. 3.8. Обобщенная функциональная схема ТИС
с временным разделением каналов
На принимающей стороне промежуточный параметр преобразуется демодулятором ДМ в тот или иной си шал (чаще всего напряжение переменного тока), который через измерительный коммутатор ИК2 принимающей стороны ТИС поступает на раздельные устройства индикации (или регистрации).
Для синхронной и синфазной работы коммутаторов ИК1 и ИК2 в системе предусмотрены устройства цикловой (УЦС) и внутрицикловой синхронизации (УВЦС).
Устройства УЦС обеспечивают синхронную работу ИК1 и ИК2, принудительно устанавливая коммутаторы в исходное положение один раз за цикл, т.е. за время передачи всех измерительных каналов. При этом УЦС 1 на передающей стороне вырабатывает сигнал, отличающийся от сигналов, несущих измерительную информацию, которые УЦС2 принимающей стороны вырабатывает и использует для установки ИК2 в исходное положение.
Устройство УВЦС обеспечивает синхронную работу ИК2 в пределах цикла, т.е. переключение ИК2 с той же скоростью, что и ИК1.
При частотном разделении возможна одновременная (параллельная) передача по линии связи значений нескольких измеряемых величин. Для передачи каждой величины используют определенную (для каждой величины — свою) поднесущую частоту.
Структурная схема ТИС с частотным разделением каналов (ЧРК) представлена на рис. 3.9 Унифицированные сигналы от измерительных преобразователей ИП поступают на входы модуляторов поднесущих частот (МИР), которые выбирают таким образом, чтобы сигналы можно было отделить друг от друга на принимающей стороне. Фильтры Ф после МИН служат для подавления высших гармоник и устранения возможных перекрытий спектров соседних каналов. Сигналы после фильтров Ф суммируются сумматором Си в виде единого сигнала через модулятор М (на рис. 3.9 не показан) поступают в линию связи ЛС.
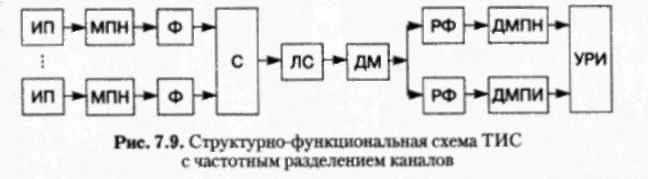
Рис. 3.9. Структурно-функциональная схема ТИС
с частотным разделением каналов
На принимающей стороне единый сигнал поступает на демодулятор ДМ, а затем с помощью разделительных фильтров РФ разделяется на сигналы, соответствующие отдельным измерительным сообщениям. Отдельные сигналы подают на демодуляторы поднесущих ДМПН, на выходах которых появляются измерительные сообщения в виде оценок измеряемых величин. Эти оценки могут поступать на общее устройство регистрации и индикации У РИ.
В зависимости от информативного параметра сигнала, которым передается значение измеряемой величины по линии связи, ТИС подразделяют на цифровые системы, токовые, частотные, времяимпульсные. При этом изменяются модулятор М и демодулятор ДМ.