

Автоматизированные стереокомпараторы СКА-30 и СКА-1818 обеспечивают выполнение измерений по снимкам формата 18×18 или
30×30 соответственно с ошибкой 2–5 мкм с регистрацией полученных результатов на машинный носитель. Увеличение наблюдательной
системы переменное – от 6 до 20×. Особенностью этих приборов яв- |
|||||
|
|
|
|
|
И |
ляется возможность наблюдения дополнительного снимка или кадра |
|||||
неразрезанного аэрофильма (например, смежного маршрута) в паре с |
|||||
одним из основных, что важно для повышения надежности ото- |
|||||
ждествления наблюдаемых точек. |
|
|
|
||
Стереокомпаратор Stecometer фирмы «Карл Цейсс Йена» пред- |
|||||
|
|
|
Для |
||
назначен для измерения координат и параллаксов точек снимков |
|||||
формата 23×23 см с точностью ±2 мкм. |
ре гистрации результатов |
||||
измерений на машинном носителе к прибору подключается коорди- |
|||||
метр – универсальная электронная система, предназначенная для ре- |
|||||
|
|
А |
|
||
гистрации данных, полученных на любом стереофотограмметричес- |
|||||
ком приборе, выпускаемом фирмой. |
|
|
|
||
В настоящее |
время в связи с массовым применением методов |
||||
цифровой фотограмметрии стереокомпараторы потеряли актуаль- |
|||||
ность, однако они имеют достаточно широкое распространение и ос- |
|||||
бку m |
|
|
|
||
таются высокоточными приборами. |
|
|
|
||
|
|
6.7. Точность измерений |
|
||
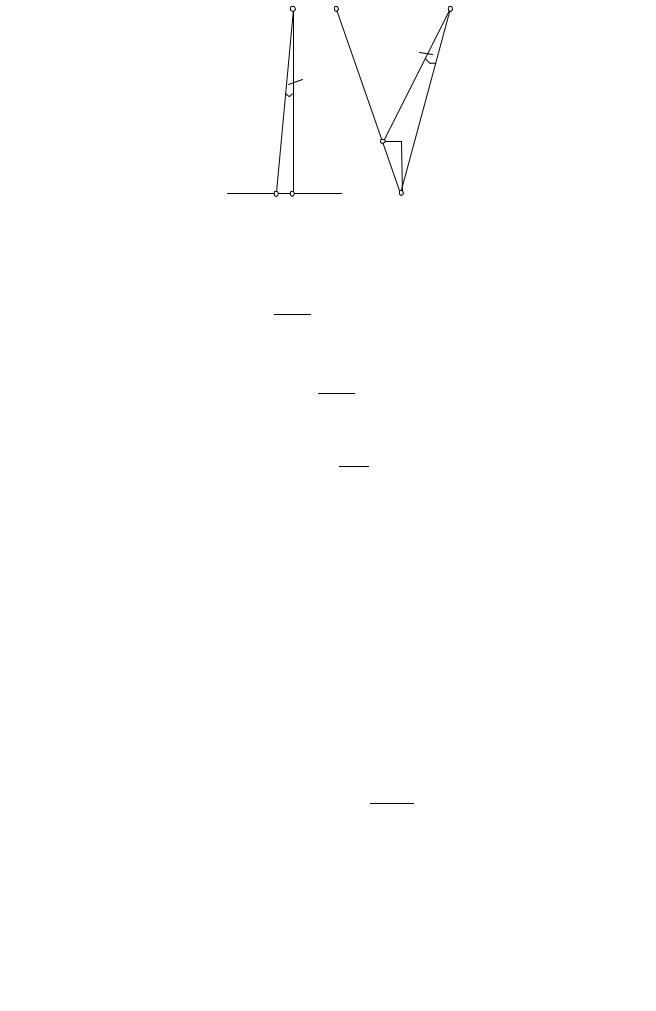
При монокулярном наведении измерительной марки m на точ- |
|||||
пределения |
а) при помощи системы с увеличением v на- |
||||
ку снимка a (рис. 6.13, |
|||||
блюдатель замет т |
х несовмещение ma, если его угловая величина |
||||
больше ли равна остроте монокулярного зрения первого рода ∆γ′m/v. |
|||
Полагая отрезок Oa соответствующим расстоянию наилучшего зре- |
|||
С |
наведения |
|
|
н я D, найдем ош |
|
||
|
∆x = D |
∆γ ′ |
(6.6) |
|
|
vρ |
|
Для о |
оптимального увеличения изображения тео- |
||
ретически возможную разрешающую способность объектива (1.7) |
|||
представим в угловой мере, для чего лине |
йный размер разрешения |
||
1/Rоб разделим на фокусное расстояние и умножим на ρ″:
158
|
|
|
|
|
O |
|
O1 |
|
O2 |
|
|
|
|
|
|
|
∆γ′m |
∆γ′b |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
m |
∆x |
|
|
|
|
|
|
|
|
|
|
∆h |
|
|
||
|
|
|
|
m |
|
|
|
|
|
||
|
|
|
|
a |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
б |
|
|
|
|
|
|
|
Рис. 6.13. Точность монокулярных |
|
|
|||||
|
|
|
|
(а) и стереоскопических (б) |
|
|
|||||
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
ε = |
ρ′′ |
= |
206265 f ≈ |
140 |
|
|
|
|
|
|
|
|
fR |
|
fd1480 |
d |
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
|
и приравняем полученное значение величине ∆γ′m/ v: |
|
||||||||||
|
|
|
|
|
|
∆γ ′ |
140 |
|
И |
||
|
|
|
|
|
ε = |
|
υ m = |
d . |
|
||
|
Отсюда оптимальное увеличения изображения |
|
|
||||||||
|
|
|
|
|
υ = d |
∆γ m′ , |
|
|
(6.7) |
||
|
|
|
|
|
|
|
140 |
Д |
|
||
|
|
|
|
|
|
|
|
|
|||
где d – диаметр действующего отверстия объектива. |
|
|
|||||||||
|
При d = 30 мм и ∆γ′m = 45″ получим, что v = 10×. |
|
|||||||||
|
Принято считать, что при юстировке прибора увеличение долж- |
||||||||||
но быть порядка 20×, при измерении координат точек снимков – 10×, а |
|||||||||||
при съемке рельефа |
контуровА, когда важно иметь большое поле зре- |
||||||||||
н е наблюдательной с стемы, увеличение должно быть 4–8×. |
|
||||||||||
|
При стереоскоп ческ х измерениях, совмещая измерительную |
||||||||||
марку m с точкой стереомодели a (рис. 6.13, б), наблюдатель до- |
|||||||||||
|
|
б |
|
|
|
|
|||||
пускает ош бку |
∆x в плане |
ошибку ∆h по высоте, величины которых |
|||||||||
зав сят от остроты б |
нокулярного зрения первого рода ∆γ′b. |
|
|||||||||
|
Оценку ошибки по высоте найдем по формуле (6.2), заменив ∆D |
||||||||||
на ∆h |
уч |
|
увеличение v наблюдательной системы: |
|
|||||||
|
итывая |
|
|
|
∆γ′b′′ . |
|
|
|
|||
С |
|
|
|
∆h |
= D2 |
|
|
(6.8) |
|||
|
|
|
|
|
|
bг ρ v |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
159 |
|
|
|
|
Ошибка измерений в плане, как следует из рис. 6.13, a, равна
∆ p = D |
∆γ b′ |
. |
(6.9) |
′′ |
|||
|
ρ v |
|
|
При D = 250 мм, bг = 65 мм; v = 10× и ∆γ′b = 20″ получим ∆p = 2,4 |
|||||
мкм и ∆h= 9 мкм. Ошибка монокулярного измерения ∆x при ∆γ′m= 45″ |
|||||
и v = 10×, составляет 5 мкм. |
|
||||
|
|
|
Контрольные вопросы и задания |
||
1. |
Перечислите качественные и количественные характеристи- |
||||
ки глаза. |
|
|
|
|
Д |
|
|
|
|
|
|
2. |
В какой области спектра электромагнитного излучения мак- |
||||
симум цветовой чувствительности глаза? |
|||||
3. |
Чем характеризуется острота монокулярного зрения первого |
||||
и второго рода? |
|
|
А |
||
4. |
Во сколько раз выше острота бинокулярногоИзрения по от- |
||||
ношению к монокулярному? |
|
||||
5. |
При каких условиях бинокулярное зрение переходит в сте- |
||||
реоскопическое? |
|
|
|
||
6. |
|
б |
|
||
Какие пять условий необходимо выполнить для восприятия |
|||||
глубины о ъекта при рассматривании изображений, полученных по |
|||||
законам центральной проекции? |
|
||||
оценив |
|
|
|||
7. |
Как нео ходимо ориентировать перекрывающиеся снимки |
||||
для получения прямого, о ратного и нулевого стереоэффектов? |
|||||
8. |
Переч сл те спосо ы стереоскопических наблюдений. |
||||
9. |
В чём сущность монокулярного способа измерения снимков? |
||||
10. |
Охарактер зуйте два спосо а стереоскопических измерений |
||||
С |
|
|
|
|
|
(способ действ тельной марки и способ мнимой марки). |
|||||
11. |
Переч сл те основные элементы принципиальной схемы |
||||
стереокомпаратора. |
|
|
|||
12. |
Как |
|
вается точность при монокулярных измерениях? |
||
13. |
Как |
|
ается точность при стереоскопических измерени- |
||
ях (в плане и по высоте)? |
|
|
|||
14. |
Какие измерения наиболее предпочтительнее по точности |
||||
монокулярные или стереоскопические? |
|
||||
160