

2.Масштаб изображения по направлениям, совпадающим с горизонталями, остается неизменным. В этом можно убедиться, рассмотрев подобные треугольники с общей вершиной в точке i.
3.Преобразование сетки квадратов предметной плоскости в сет-
ку трапеций в картинной плоскости позволяет говорить о наличии угловых и линейных искажений. И6. Какой масштаб по горизонталиД(то есть линии, перпендику-
|
А |
лярной главной вертикали)? |
|
7. Каким образом определяются угловые искажения по постро- |
|
б |
|
енной перспективе сетки квадратов? |
|
8. В какой точке пересекаются продолжения перспектив верти- |
|
кальных о ъектов? |
|
Глава 3. ТЕОРИЯ ОДИНОЧНОГО СНИМКА
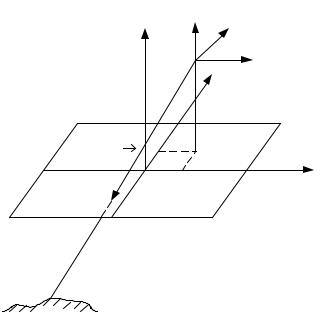
3.1. С стемы координат снимка. Элементы внутреннего
ор ентирования снимка |
|
На каждом сн мке |
меются изображения координатных меток, |
которые определяют правую прямоугольную систему координат |
|
снимка o’xyz. |
|
Ось х этой |
проходит через координатные метки 1–2 и |
системы |
|
направлена приблизительно по направлению полета. Началом систе- |
|
Смы координат является точка о’, получаемая в результате пересечения оси х с линией, проведенной через координатные метки 3 и 4. Ось y лежит в плоскости снимка Р и перпендикулярна оси х. Ось z дополняет систему до правой.
77
|
|
|
|
|
|
z |
|
|
z |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.o' x0 |
|
.o |
|
Р |
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
y0 |
|
|
|
|
x |
|
||
|
|
|
m |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
Рис. 3.1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Любая точка снимка, например m, имеет в этой системе коорди- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
нат координаты m(х,у,z =0). Центр проекции S имеет в этой системе |
|||||||||||||||
координаты S (x=x0; y=y0; z=f ). f - фокусное расстояние снимка, а х0 и |
|||||||||||||||
у0 – координаты главной точки снимка О. |
|
|
|
|
|
||||||||||
Для восстановления связки проектирующих лучей, сформировав- |
|||||||||||||||
ших снимок в системе координат снимкаДo’xyz, необходимо для ка ж- |
|||||||||||||||
дой точки снимка определить координаты вектора Sm = r |
в этой систе- |
||||||||||||||
ме координат по измеренным на снимке координатам точки m. |
|||||||||||||||
xm |
|
xs |
|
x |
|
x0 |
|
x − x0 |
|
|
|||||
r = y |
m |
− |
yА= y − y = y − y |
0 |
|
(3.1) |
|||||||||
|
|
s |
|
|
|
|
|
0 |
|
|
|
. |
|||
|
|
|
|
|
|
0 |
|
|
f |
|
|
− f |
|
|
|
zm |
|
zs |
|
|
|
|
|
|
|
|
|
||||
Из выражен я |
|
(3.1) |
следует , |
что для восстановления связки |
|||||||||||
проект рующ х лучей |
|
|
|
|
|
измерить ординаты точки и знать |
|||||||||
необходимо |
|
|
|
|
|
|
|
|
|||||||
значен я коорд нат центра проекции S в системе координат снимка f , |
|||||||||||||||
х0 , y0, которые являются постоянными для данного снимка и называ- |
|||||||||||||||
ются элементами внутреннего ориентирования снимка. |
|
||||||||||||||
широкоБолее в фотограмметрии используют систему координат |
|||||||||||||||
снимка Sxyz , началом которой является центр проекции S , а оси коор- |
|||||||||||||||
динат параллельны соответствующим осям системы координатo’xyz. |
|||||||||||||||
Так как система координат Sxyz параллельна системе координат |
|||||||||||||||
o’xyz ,то, как известно из аналитической геометрии, координаты век- |
|||||||||||||||
Сторов в обеих системах координат равны, то есть координаты вектора |
|||||||||||||||
r в системе координат Sxyz определяются выражением (3.1). |
|||||||||||||||
|
|
|
|
|
|
|
78 |
|
|
|
|
|
|
|
|
3.2. Системы координат объекта. Элементы внешнего ориентирования снимка
|
Положение точек объекта (местности) по снимкам |
определяют |
||||||||||
в прямоугольной пространственной системе координат OXYZ . В за- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
И |
|
висимости от решаемой задачи в качестве этой системы координат |
||||||||||||
используют: |
|
|
|
|
|
|
|
|
|
|
||
|
- |
государственную |
картографическую |
систему |
координат |
|||||||
(в России Гаусса – Крюгера); |
|
|
|
|
|
|
|
|||||
|
- |
геоцентрическую систему координат; |
|
|
||||||||
|
- |
произвольную систему координат, связанную с характерными |
||||||||||
точками объекта (местности). |
|
|
|
|
|
|
|
|||||
|
Положение и ориентацию системы координат снимка (или, что |
|||||||||||
то же самое, снимка) в системе координат объекта OXYZ определяют |
||||||||||||
элементы внешнего ориентирования снимка. |
|
|
|
|||||||||
|
|
|
|
А |
|
|
||||||
|
Положение центра проекции S |
в системе координат объекта оп- |
||||||||||
ределяют его координаты Xs,Ys,Zs. |
|
|
|
|
|
|
||||||
|
Угловая ориентация системы координат снимка относительно |
|||||||||||
системы координат объекта определяется ортогональной матрицей |
||||||||||||
|
|
a |
a |
a |
|
cos Xx |
cos Xy |
cos Xz |
|
|||
|
|
11 |
12 |
13 |
|
|
|
Д |
|
|||
|
|
A = a21 |
a22 |
a23 |
|
= cosYx |
cosYy |
cosYz |
(3.2) |
|||
|
|
|
a32 |
|
|
|
|
cos Zy |
|
|
||
|
|
a31 |
a33 |
cos Zx |
cos Zz |
|
||||||
|
нусами |
|
|
|
1 |
0 |
0 |
|
|
|
||
кос |
В матрице А |
элементы (направляющие косинусы) |
аij являются |
|||||||||
|
пространственных углов между осями координат систе- |
|||||||||||
мы коорд нат о ъекта OXYZ и снимка Sxyz. |
|
|
|
|||||||||
|
Направляющ е кос нусы являются координатами единичных |
|||||||||||
С |
|
|
|
|
|
|
|
|
|
|
||
векторов (ортов), совпадающих с осями координат снимка в системе |
||||||||||||
коорд |
нат объектаб. |
|
|
|
|
|
|
|||||
|
Вследств е особых характеристик ортогональной матрицы |
|||||||||||
|
|
|
|
А-1 = Ат ; |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
0 |
1 0 |
|
|
|
|
|
|
|
а ААт =Е= |
. |
|
|
||||||
|
|
|
|
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
79
В ортогональной матрице независимы только 3 элемента, следовательно, элементы матрицы являются функцией 3 параметров. В качестве
этих параметров в фотограмметрии используют 3 угла-ω,α и , которые называют угловыми элементами внешнего ориентирования снимка.
осям системы координат снимка. При этом последовательность и направление вращений могут быть произвольными, поэтому в фотограмметрии используют различные системы угловых элементов ориентирования снимка.
Последовательно поворачивая систему координат объекта OXYZ на эти углы вокруг ее осей, можно ориентироватьИее параллельно
Рассмотрим наиболее широко используемую систему, в которой система координат объекта OXYZ поворачивается последовательно против часовой стрелки (правые углы) вокруг осей X, Y и Z соответст-
венно на углы ω,α и .
В результате перемножения матриц
А = Аω α = ωα А
получим значения элементов aij |
как функции углов ω,α и : |
|||||||||||||
|
а11 = cosα cos |
|
|
|
|
|
|
|
|
|
|
|||
|
a12 |
= − cosα sin |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
a13 |
= sinα |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||
|
a21 = sinω sinα cos + cosω sin |
|
|
|||||||||||
|
|
|
||||||||||||
|
a22 |
= −sinω sinα sin + cos |
|
|
|
|
|
|||||||
|
ω cos |
(3.3) |
||||||||||||
|
a23 |
= −sinω cosα |
|
|
|
|
|
|
|
|
|
|||
|
+ |
ω |
|
|
|
|||||||||
|
a31 |
= − |
ω |
α |
sin |
|
||||||||
|
|
Аcos sin cos sin |
|
|
|
|
||||||||
|
a32 |
= cosω sinα sin + sinω |
cos |
|
|
|||||||||
|
|
|
||||||||||||
|
a33 |
= cosω cosα |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
б |
|
|
|
|
|
|
|
|
|
|
|
||
звестны значен я направляющих косинусов aij, то из в ы- |
||||||||||||||
ражен й (3.3) можно получ ть значения углов ω,α, . |
|
|
||||||||||||
Если |
|
|
|
a23 |
|
|
|
|
|
|
||||
|
|
− |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
ω = arctg |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
a33 |
|
|
|
|
|
|
|||||
С |
|
α = arcsin(a |
|
) |
|
|
|
|
|
|
|
(3.4) |
||
|
|
|
13 |
|
|
|
. |
|
|
|
|
|||
|
|
|
|
a12 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
− |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||
|
= arctg |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
a11 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
80