

Глава 1. ОСНОВЫ АЭРО- и КОСМИЧЕСКОЙ ФОТОСЪЕМКИ 1.1. Общие понятия об аэрофотосъемке
Одним из важнейших применений фотографии является воздушное и космическое фотографирование, т. е. получение снимков зем-
ной |
искусственных |
И |
|
||
|
|
нию с целью
местности
ных
- летно-съемочные работы, включающие разработку техниче-ских условий аэрофотосъемки, составление проекта и его исполнение;
аэрофотосъёмки
рованных
вичной |
АД |
рацию |
|
фотосъемки. |
Результатом традиционных ра от являются аэронегативы, аэроснимки, а также зафиксированные в полете показания специальных приборов.
Аэронегат вы (аэроснимки) – фотографические изображе-
н я местности, покрывающ е |
ез разрывов заданный участок земной |
||
поверхности, спользуются для последующего преобразования и соз- |
|||
дан я по н м карт |
планов. |
Для обеспечения последующих работ |
|
смежные аэронегатбвы (аэроснимки) должны иметь перекрытия рас- |
|||
четной вел ч ны. Метр ческие и фотометрические характеристики |
|||
аэронегат |
вов в знач |
тельной степени зависят от выполнения техни- |
|
ческих условий аэрофотосъемки и выбора параметров применяемых |
|||
для аэрофотосъемкифотографических материалов и оптических сис- |
|||
тем. Точность и качество аэронегативов, в свою очередь, определяет |
|||
качество |
создаваемых по |
ним карт и планов, сроки |
|
Сфотограмметрической обработки, организацию работ и т.п. Для получения полноцен-ных аэронегативов и их эффективного использования необходимо со-гласование летно-съемочных работ, и в первую очередь их парамет-ров, с организацией всего топографогеодезического производства.
23
В отличие от традиционной аэрофотосъёмки цифровая аэрофотосъёмка выполняется по двум технологиям, которые зависят от типа цифровых камер:
-летно-съемочные работы, в которых используют камеры с
ПЗС линейками обязательно сочетаются две системы GPS + INS, то есть Глобальная система позиционирования и ИнерциальнаяИсистема, для определения положения изображения ПЗС-линейки в пространстве в каждый момент времени. Эта съёмочная система часто используется также при космических съёмках. Бортовой компьютер и про-
граммное обеспечение позволяют интегрировать обработку данных GPS-приёмника и данных INS-инерциальнойДсистемы и объединить трансформированное по ним изображение в полные снимки.
В самолётном варианте изменения в высоте платформы, на которой установлена камера, трудно предсказуемы. Поэтому разработан
иреализован второй технологический подход – матричный сенсор;
-летно-съемочные работыА, выполняемые на основе матричногол нзовый о ъектобрабов форм рует четыре отдельных изображения, кото-
мки |
в центральную проекцию и автоматически |
|
рые трансформ руют |
||
стыкуют. Так е сн мки обрабатываются по существующим програм- |
||
С |
|
тки. |
мам анал т ческой |
||
Результатом ц фровой аэрофотосъёмки являются цифровые аэ- |
||
рофотосн |
, а также заф ксированные в полете элементы внешне- |
|
го ориентирования (линейные: Xs, Ys, Zs – координаты центра фотографирования; угловые: α, ω, χ – ориентирование камеры относительно осей координат).
В соответствии с законами центрального проектирования, по которым строится изображение местности, аэронегатив (аэроснимок) содержит ряд искажений, величины которых определяются углом наклона оптической оси аэрофотоаппарата и колебанием рельефа местности. Устранение этих искажений осуществляется в процессе их фо-
24
тограмметрической обработки, в частности, фотографического или цифрового преобразования, называемого трансформированием. В связи с этим использование аэроснимков без их предварительного трансформирования для картографического (топографического) обес-
печения выполняемых работ, в том числе в качестве основы ГИС, ог- |
|
раничивается влиянием указанных искажений. |
И |
|
|
Показания специальных приборов и оборудования, зафиксиро- |
|
ванные в процессе аэрофотосъемки, обеспечивают стабилизацию съемочной камеры в полете или последующее определение по ним пространственного положения аэроснимков в абсолютной или относительной системе координат с целью последующего их использования при выполнении фотограмметрических работ и преобразовании аэроснимков в планы и карты. К числу таких приборов относят гироскопы, системы глобального позиционирования, оборудование для определения высоты полета, превышений между центрами фотографирования, а также аэронавигационные системы и др. Наличие указанных данных во многом определяет технологию камеральной обработки материалов аэрофотосъемки, существенно влияет на оперативность, точность фотограмметрических по-
строений и объемы полевых работ по их обеспечению. |
|
|
|
|
||||||||||
|
Аэрофотосъемочные |
|
выполняются специализированными |
|||||||||||
подразделениями топографо-геодезическойДили землеустроительной |
||||||||||||||
службами на специально о орудованных летных средствах. |
|
|
|
|
||||||||||
|
|
|
1.2. |
эрофотоаппарат |
|
|
|
|
||||||
|
Основным средством, |
позволяющим |
|
|
|
|
|
|
|
|
|
|||
получить аэрофотоснимки,Аявляется аэро- |
|
|
|
|
|
4 |
|
|||||||
3 |
|
|
||||||||||||
фотоаппарат (АФА) – сложный высоко- |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
точный опт ко-механ ческ й и электрон- |
|
|
|
|
|
|
|
|
|
|||||
ный пр бор. АФА не имеет при- |
|
|
|
|
|
|
|
|
|
|||||
способлен |
й для наводки на резкость, по- |
1 |
|
|
|
|
||||||||
|
|
|
работы |
|
|
|
|
|
|
|
|
|
|
|
скольку высота фотограф рования всегда |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
5 |
|
||||||||
больше г перфокального расстояния (1.6). |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
Типы |
|
конструкции |
современных |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
АФА |
|
|
, но все они в своей основе |
|
|
|
|
|
|
|
|
|
||
|
различны |
|
|
|
|
|
|
|
|
|
|
|
||
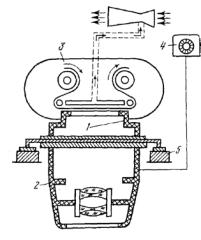
имеют единую принципиальную схему. |
Рис. 1.1. Принципиальная |
|||||||||||||
Основные их узлы – корпус, конус, кассета |
|
|
|
|
схема |
|
|
|
|
|||||
и командный прибор (рис. 1.1). |
|
|
аэрофотоаппарата |
|||||||||||
|
Корпус АФА 1 служит для размещения механизмов, обеспечи- |
|||||||||||||
вающих работу всех частей фотокамеры – счетчика кадров, часов, |
||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
||
уровня, числового индекса фокусного расстояния и др. В верхней час-
25
ти корпуса размещена прикладная рамка, плоскость которой совпадает с главной фокальной плоскостью объектива.
Конус АФА 2 крепится к нижней части корпуса и содержит оптическую систему, в которую входят объектив, светофильтры, компенсатор сдвига изображения и др.
Кассета 3 служит для размещения фотопленки и приведения ее светочувствительного слоя при экспонировании в соприкосновение с плоскостью прикладной рамки. В промежутке между экспозициями фотопленка перематывается с подающей катушки на принимающую. Перематываемый участок пленки соответствует формату кадра с учетом промежутка между кадрами. Выравнивание пленки в плоскость выполняется механическим прижимом к плоскому стеклу или путем откачивания воздуха из промежутка между пленкой и прикладной рамкой.
Командный прибор 4 предназначен для дистанционного управ- |
||
ления всеми механизмами аэрофотоаппарата |
– измерения времени |
|
|
|
И |
между экспозициями и их продолжительности, подачи команд на сра- |
||
батывание затвора АФА, перемотки фотопленки, отсоса воздуха меж- |
||
ду фотопленкой и прикладной рамкой и т. п. В современных аэрофо- |
||
тоаппаратах ко мандный |
управляет двумя-тремя съемочными |
|
камерами. |
Д |
|
Аэрофотоустановка 5 |
служит для крепления аэрофотоаппарата |
|
на борту носителя, ориентирования его в |
пространстве и предо- |
|
хранения от толчков ви рации. |
|
|||
|
|
|
АS |
|
|
|
f |
|
|
|
|
|
y |
|
|
|
|
o |
|
|
пo′ риборx |
|
||
|
Р с. 1.2. Пр кладная |
Рис. 1.3. Первая |
||
|
рамка |
|
оптическая |
|
|
аэрокамеры |
метка |
||
и |
|
|
|
|
С |
|
|
|
|
В плоскости прикладной рамки размещены четыре механические координатные метки (рис. 1.2), изображающиеся на каждом снимке. Прямые, соединяющие противоположные метки, должны быть взаимно перпендикулярны, а точка их пересечения o′ – совпадать с главной точкой снимка o.
26

Современные АФА имеют в плоскости прикладной рамки 4–8 оптических координатных меток, размещенных по углам кадра, или равномерно распределенную по полю сетку крестов с шагом 1–2 см. Причем оптические координатные метки имеют специальные признаки (рис. 1.3), что допускает автоматическое определение их номеров и распознавание точки, к которой отнесены координаты.
Параметры аэрофотоаппарата (фокусное расстояние f и координаты главной точки o, расстояния между механическими метками, координаты оптических меток или крестов) определяют по результатам ее калибровки при строго определенном положении, одновременно с величинами остаточной дисторсии. Координаты
точки o′ пере-сечения линий, соединяющих противоположные |
|
координатные метки прикладной рамки (см. рис. 1.2), определяют |
|
исходя из условия сим-метричности фотограмметрической |
|
дисторсии. |
И |
|
|
Современные аэрофотоаппараты имеют формат кадра 18×18 или |
|
23×23, или 30×30 см. ФА оснащены специальными устройствами, обес- |
||||||
печивающими: автоматическое вычисление интервалов между экспози- |
||||||
циями (для аэрофотосъемки с заданным перекрытием), впечатывание в |
||||||
кадр сенситометрического клина и навигационныхДданных; авто- |
||||||
матическое регулирование экспозиции, измерение контрастности изо- |
||||||
бражения |
|
А |
|
|||
компенсацию его сдвига; |
смену светофильтров; индикацию |
|||||
|
и |
|
|
|
|
|
снимаемого ландшафта на мониторе и т. п. |
|
|||||
|
Основные техн ческие характеристики некоторых современ- |
|||||
ных АФА пр ведены в та л. 1.1. |
|
|
Таблица 1.1 |
|||
ТЭС |
Фокусное |
|
Разрешающая |
Остаточная |
||
|
Т п АФА брасстояние, мм |
|
способность |
дисторсия, мкм |
||
|
|
|
|
|
линий, мм |
|
|
АФА |
-10М (РФ) |
100 |
|
33 |
10 |
|
АФА -50 (РФ) |
500 |
|
35 |
10 |
|
|
ТК-350 (РФ) |
350 |
|
35–80 |
20 |
|
|
АТ-204 (РБ) |
150, 300 |
|
50–100 |
3 |
|
|
RC Wild/Leica |
153 |
|
120 |
2 |
|
|
RC Wild/Leica |
305 |
|
107 |
2 |
|
В конце XX в. начали появляться цифровые съемочные системы, основанные на использовании приборов с постоянной зарядовой связью в виде матриц, помещаемых в плоскости прикладной рамки, или
27