

3.3. Формулы связи координат соответственных точек снимка и местности
Пусть из точки S получен снимок Р, на котором точка М мест- |
|||||||||||||||||||||||
ности изобразилась в точке m. Найдем зависимости между координа- |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mr |
|
|
И |
||
тами этих точек. Положение точки М местности в системе координат |
|||||||||||||||||||||||
|
OXYZ определяет вектор RM = OM . |
|
|
|
|
|
|||||||||||||||||
объекта |
|
Вектор RS = OS опреде- |
|||||||||||||||||||||
ляет положение центра проекции S в системе координат объекта |
|||||||||||||||||||||||
OXYZ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
А |
|
·S |
|
|||||||||||||
|
|
|
|
|
|
|
|
y |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· ·o |
|
||
|
|
Z |
|
|
|
|
|
|
|
|
Rs |
|
|
|
|
x |
|||||||
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· M |
|
|
|
|
|
||||
|
|
O· |
|
|
|
|
RM |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
Рис. 3.2 |
||||||||
Векторы |
r = |
|
|
R = |
|
|
|
|
|
|
определяют собственно положение |
||||||||||||
Sm |
|
SM |
|
||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S. |
|
|
|
||
точек m |
М относ тельно центра проекции |
|
|
|
|||||||||||||||||||
Из р с. 3.2 |
следует, что |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
R |
|
|
|
|
|
|
|
RM |
= RS |
+ R . |
|
|
|
|
(3.5) |
||||||
Векторы |
r коллинеарные, поэтому можно записать, что |
||||||||||||||||||||||
и R |
= Nr |
, |
|
|
|
|
|
(3.6) |
|||||||||||||||
где N – скалярная величина. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
учетом уравнения (3.6) выражение (3.5) примет вид |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
RM = RS + Nr ; |
|
|
|
|
(3.7) |
||||||||||
81
В координатной форме выражение (3.7) имеет вид
|
|
|
|
|
X |
|
|
|
X |
|
|
|
|
|
X |
′ |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Y |
= |
YS |
|
+ |
N Y |
′ |
|
|
|
||||||||||
|
|
|
|
|
|
Z |
|
|
|
ZS |
|
|
|
|
|
|
|
|
|
|||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
Z |
′ |
|
|
|
|||||||
|
|
|
|
|
|
|
|
X = X S |
+ NX |
′ |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Y |
= YS + NY ′ |
|
|
|
|
(3.8) |
|||||||||
|
|
|
|
|
|
|
|
|
, |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Z |
= ZS + NZ′ |
|
|
|
|
|
|||||||||
где X,Y,Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
– координаты точки |
|
М |
|
в |
|
системе |
координат |
объекта; |
||||||||||||||||
Х s,Ys,Zs − |
координаты |
|
центра |
проекции |
|
|
S |
в системе координат |
||||||||||||||||
объекта; X′, Y′, Z′ − координаты вектора r в системе координат объекта. |
||||||||||||||||||||||||
|
|
|
|
|
X ′ |
|
|
x − x |
0 |
|
|
|
И |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Y ′ |
= A y − y0 |
|
, |
|
|||||||||||||||
|
|
|
|
|
|
|
|
(3.9) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
f |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Z′ |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
преобразования |
|
|
|
Д |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где А – матрица |
|
|
|
|
|
|
|
координат, элементы aij которой оп- |
||||||||||||||||
ределяются по значениям угловых элементов внешнего ориентирова- |
||||||||||||||||||||||||
ния снимка ω,α, . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из третьей формулы выражения (3.8) следует, что |
|
|
||||||||||||||||||||||
связи |
|
|
|
N = |
Z − |
ZS |
. |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
Подстав в значен е NАв первые две формулы выражения (3.8), |
||||||||||||||||||||||||
получ м формулы |
|
|
координат соответственных точек местности |
|||||||||||||||||||||
снимка: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X ′ |
|
|
|
|
|||
|
|
|
Х = Х |
S |
+ (Z − Z |
S |
) |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
Z′ , |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.10) |
||||
|
|
|
Y = YS + (Z − ZS ) |
Y ′ |
|
|
|
|
|
|
||||||||||||||
|
|
|
Z′ |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
которые с учетом выражения (3.9) имеют вид |
|
|
|
|
||||||||||||||||||||
С |
X = X S + (Z − ZS ) |
a |
(x − x |
|
) + a |
( y − y |
) − a13 f |
|
||||||||||||||||
11 |
|
|
0 |
|
|
|
|
12 |
|
0 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
a31(x − x0 ) + a32( y − y0 ) − a33 f |
(3.11) |
|||||||||||||||||
Y = YS + (Z |
− ZS ) |
a |
21(x |
− x0 ) + a22 ( y − y0 ) |
− a23 f |
. |
||||||||||||||||||
|
|
|||||||||||||||||||||||
a |
31 |
|
− x0 ) + a32 ( y − y0 ) |
− a33 f |
|
|
||||||||||||||||||
|
|
|
|
(x |
|
|
||||||||||||||||||
82
Из формул (3.10) и (3.11) следует, что координаты точки местности по снимку можно получить по координатам её изображения на снимке, если известны элементы внутреннего и внешнего ориентирования снимков и известна высота Z этой точки.
Найдем теперь формулы связи координат соответственных точек и местности, которые позволят вычислить координаты изображения точки на снимке в системе координат снимка по координатам соответственной точки местности, определенным в системе координат объекта OXYZ.
Из выражения (3.7) следует, что
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
r = |
|
|
|
(RM |
|
|
|
− RS ) . |
|
|
(3.12) |
|||||||||||||
|
|
|
N |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В координатной форме выражение (3.12) имеет вид |
|
||||||||||||||||||||||||||
|
|
x − x |
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
И |
|||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
y − y0 |
|
= |
|
|
|
y |
|
|
|
||||||||||||||||
|
|
|
N |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
− f |
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
x = x0 + |
|
|
|
x |
* |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
N |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
* |
Д |
|
|||||||
|
|
|
y = y0 + |
|
|
|
y |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.13) |
||||||||||||
|
|
|
|
N |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
. |
|
||||||
|
|
|
− f = |
|
|
|
z |
* |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
А |
|
|
||||||||||||||||||||||
где x,y – коорд наты зо ражения точки местности m в системе коор- |
|||||||||||||||||||||||||||
д нат сн мка Sxyz. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x* |
|
|
|
|
|
X |
|
− |
X |
|
|
|
|
|
|||||||||||
|
|
|
* |
|
|
T |
|
|
Y |
|
|
−Y |
|
S |
|
|
|
|
|||||||||
|
бy = A |
|
|
S |
|
|
; |
|
(3.14) |
||||||||||||||||||
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Z |
|
− ZS |
|
|
|
|
|||||||||||||
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Из третьего выражения формулы (3.13) следует, что |
|
||||||||||||||||||||||||||
и |
|
|
1 |
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|||||
С |
|
|
|
= − |
|
. |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
N |
|
* |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
83

1
Подставив значение N в первые два уравнения выражения (3.9), получим формулы связи координат соответственных точек снимка и
|
* |
|
|
|
|
||
x = x0 − f |
x |
|
|
|
И |
||
* |
|
||||||
|
|
z |
|
|
|
; |
|
местности: |
|
|
|
(3.15) |
|||
|
y |
* |
|
||||
y = y0 − f |
|
|
|
|
|
|
|
|
z |
* |
|
|
|
||
|
|
|
|
|
|
|
|
которые с учетом формулы (3.14) имеют вид |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||||
|
x = x0 − f |
a11 (X − X S ) + a21 (Y −YS ) + a31 |
(Z |
− ZS ) |
|
|
||||||||||||||||||||
|
a (X − X |
S |
) + a |
23 |
(Y −Y |
) + a |
33 |
(Z |
− Z |
S |
) |
|
|
|
||||||||||||
|
|
|
13 |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
(3.16) |
|||||||
|
|
|
a |
(X − X |
|
) + a |
|
|
(Y |
−Y |
) + a |
|
|
(Z − Z |
|
) |
; |
|||||||||
|
y = y0 − f |
12 |
|
|
S |
|
|
22 |
|
|
S |
|
|
|
32 |
|
|
|
S |
|
|
|
|
|||
|
|
|
a |
|
А |
|
(Z − Z |
|
) |
|
|
|||||||||||||||
|
|
|
(X − X |
S |
) + a |
23 |
(Y |
−Y |
) + a |
33 |
S |
|
||||||||||||||
|
|
|
13 |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
||||||
Уравнения (3.16) в фотограмметрии часто называют уравнения- |
||||||||||||||||||||||||||
ми коллинеарности. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
3.4. Формулы связи координат соответственных |
||||||||||||||||||||||||
|
|
точек местности и |
|
|
горизонтального снимка |
|
||||||||||||||||||||
горизонтального |
снимка угловые элементы внешнего ори- |
|||||||||||||||||||||||||
У |
|
|
|
|
||||||||||||||||||||||
ент рован я ω=α= =0. Будем считать, что координаты главной |
||||||||||||||||||||||||||
точки сн мка x0=y0=0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В этом случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
С |
б |
1 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
А = АТ |
= Е = |
|
|
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
(3.17) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
84
Формулы связи координат при этом будут иметь вид
X = X S − |
Z − Z |
S |
x |
|
|
||||||||
|
|
|
|
|
|
||||||||
|
|
f |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(3.18) |
|
|
|
|
|
Z − ZS |
|
|
|
; |
|||||
Y = Y |
|
− |
y |
|
|
|
|||||||
|
|
|
|
|
|||||||||
|
S |
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = − |
|
|
f |
|
|
(X − X |
S |
) |
|
||||
|
|
|
|
|
|
||||||||
|
|
Z − ZS |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
(3.19) |
||||
|
|
|
f |
|
|
(Y |
− Y ) |
. |
|||||
y = − |
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||
|
|
Z − ZS |
|
|
|
|
S |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
Если в качестве начала системы координат объекта OXYZ выбрать центр проекции S, то Xs=Ys=Zs=0, а формулы (3.18) и (3.19) примут вид
|
|
|
Z |
|
H |
|
А |
И |
||||
X = − |
f |
x = |
f |
x |
|
|
|
|||||
|
|
|
|
|
|
; |
|
(3.20) |
||||
|
Z |
|
|
|
|
|
|
|
||||
Y = − |
|
|
|
y = |
H y |
|
|
Д |
||||
б |
||||||||||||
|
|
|
f |
|
f |
|
|
|
||||
|
|
|
|
|
|
|
||||||
x = − |
|
f |
X |
= |
|
f |
X |
|
||||
Z |
|
H |
|
|
(3.21) |
|||||||
и |
f |
|
. |
|
|
|||||||
y = − |
|
|
f |
Y |
= |
|
Y |
|
|
|
||
|
Z |
|
H |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
где H = -Z – высота фотографирования над определяемой точкой.
Из формул (3.20) (3.21) следует, что горизонтальным сним- |
||||
ком гор зонтальной местности можно пользоваться как планом |
||||
С |
|
|
|
|
масштаба: |
|
|
|
|
|
1 |
= − |
f |
|
|
m |
H |
. |
|
85
3.5. Формулы связи координат соответственных точек |
||||||||||||||||
|
горизонтального и наклонного снимков |
|||||||||||||||
Пусть из точки S получен наклонный Р и горизонтальный Р0 |
||||||||||||||||
снимки, на которых точка М объекта изобразилась соответственно в |
||||||||||||||||
точках m и m0 (рис. 3.3). Найдем зависимости между координатами |
||||||||||||||||
этих точек. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
z0 |
|
x |
|
|
|
|
|
||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
S |
|
|
|
x0 |
|
||||
|
|
|
|
|
|
|
• |
|
|
|
|
P |
||||
|
|
|
|
|
|
|
f |
|
α |
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
•o |
|
|
|
|
Р |
0 |
|
|
|
|
|
|
m • |
|
|||||
|
|
|
|
|
|
|
|
0 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
О• |
|
|
|
|
m0•r |
|
|
|||
|
|
|
|
|
Рис.3.3 |
|
|
|
|
|
• |
M |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|||||
На рис. 3.3 Sm = r |
и |
Sm0 |
= r0 |
– векторы, |
определяющие поло- |
|||||||||||
жение точек m m0 относительно центра проекции S на снимках Р и Р0. |
||||||||||||||||
|
|
|
0 |
|
А |
|
|
|||||||||
Векторы r |
r |
|
|
|
|
|||||||||||
|
колл неарные, поэтому можно записать: |
|||||||||||||||
где N – скаляр. |
|
|
|
|
|
|
r |
0 |
= Nr , |
|
|
|
|
|
(3.22) |
|
В с стеме коорд нат горизонтального снимка Sx0y0z0 выражение |
||||||||||||||||
(3.22) меет в |
б |
|
|
|
|
|
|
|
||||||||
д (полагая |
х0=у0=0) |
|
|
|
|
|
|
|
||||||||
и |
|
x |
0 |
|
|
|
|
0′ |
|
|
||||||
|
|
x |
|
|
|
|
|
|||||||||
|
y0 |
|
= N y0′ |
|
|
|||||||||||
|
|
|
(3.23) |
|||||||||||||
|
− f |
|
|
|
|
|
′ |
|
|
|||||||
|
|
|
|
|
|
|
|
z |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в системе координат горизонтально- |
|||||||||
где x0y0z0 –координаты вектора r |
||||||||||||||||
го снимка. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
86 |
|
|
|
|
|
|
|
x0′y0′ =z0′
x − x |
0 |
|
|
|
|
|
|
|
|
A y − y0 |
. |
(3.24) |
||
|
− f |
|
|
|
|
|
|
|
|
Из третьего уравнения (3.23) следует, что
|
|
|
|
N = |
− f |
. |
|
|
||||||
|
|
|
|
|
|
′ |
|
|
||||||
|
|
|
|
|
|
|
z0 |
|
|
|||||
Подставив значение N в первые два уравнения (3.23) получим |
||||||||||||||
формулы связи координат соответственных точек горизонтального и |
||||||||||||||
наклонного снимков: |
|
|
|
|
0′ |
|
|
|||||||
|
|
|
|
|
x |
|
|
|||||||
|
|
x0 |
= − f |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
z |
0′ |
|
|
||||||
|
|
|
|
|
|
|
′ ; |
|
(3.25) |
|||||
|
|
y |
0 |
= − f |
y0 |
|
|
|
|
И |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
z |
0′ |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
которые с учетом выражения (3.24) примут вид |
|
|
||||||||||||
|
x0 = − f a11 (x − x0 )+ a12 |
|
|
|
Д |
|
||||||||
|
|
(y − y0 )− a13 f |
|
|
||||||||||
|
a31 |
(x − x0 )+ a32 |
|
(y − y0 )− a33 f |
|
|
||||||||
|
|
|
|
|||||||||||
|
y0 = − f a21 |
(x − x0 )+ a22 |
(y − y0 )− a23 f . |
(3.26) |
||||||||||
|
a31 |
(x |
− x0 )+ a32 |
|
|
|
|
|
|
|||||
|
(y − y0 )− a33 f |
|
||||||||||||
|
А |
|
|
|||||||||||
|
3.6. Масштаб |
зо ражения на аэроснимке |
|
|||||||||||
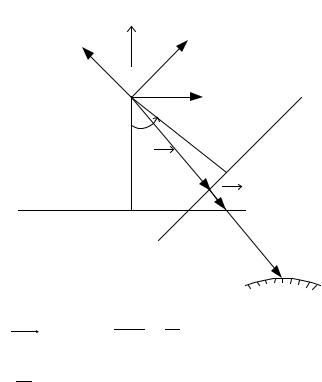
Ранее было установлено, что масштаб горизонтального снимка |
||||||||||||||
равн нной |
бпостоянен и определяется отношением фокус- |
|||||||||||||
ного расстоян я съемочной камеры к высоте фотографирования. На- |
||||||||||||||
местности0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
клонный сн мок содерж т перспективные искажения, и его масштаб уже не будет постоянным. В частности, из рис. 3.4 следует, что
для |
снимка |
P : |
1 |
|
|
f |
|
|
a0b0 |
|
|
= |
|
= |
AB ; |
||||||
m |
H |
|||||||||
для |
снимка |
P: |
1 |
|
≠ |
f |
|
≠ |
ab |
|
|
|
|
|
|
. |
|||||
m |
|
H |
|
AB |
||||||
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
bo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Po |
ao |
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.4. Масштаб |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
наклонного |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
и горизонтального снимков |
|
|
|
|
|
|
|||||||
|
Следовательно, масштаб изображения следует определять как |
||||||||||||||||||
отношение бесконечно малых отрезков наклонного снимка и мест- |
|||||||||||||||||||
ности: |
|
|
|
|
|
|
|
1 |
= dl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
(3.27) |
|||
|
|
|
|
|
|
|
|
|
m |
dL |
|
|
|
|
|
|
|
|
|
где dl и dL – бесконечно малые отрезки снимка и местности, связан- |
|||||||||||||||||||
ные с бесконечно малыми приращениями координат ограничивающих |
|||||||||||||||||||
их точек следующими зависимостями (рис. 3.5): |
И |
||||||||||||||||||
|
|
|
|
|
|||||||||||||||
Y |
dL |
|
|
|
y |
dl |
|
|
|
|
|
|
dL = |
dX 2 + dY 2 . |
|
|
|||
|
|
|
|
|
|
|
|
|
dy = dx × tgϕ, |
|
(3.28) |
||||||||
|
|
|
dX |
|
|
|
|
|
dx |
|
|
|
|
||||||
|
|
ϕ0 |
|
|
|
|
|
ϕ |
|
|
|
Д |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dl = dx / cosϕ |
|
|
|
|||
|
dY |
|
|
|
|
dy |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
O |
|
|
X |
|
o |
|
|
|
x |
|
Для |
вывода |
формулы, |
оп- |
|||||
a |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
ределяющей |
масштаб |
наклонного |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
||||
|
Р с. 3.5. Бесконечно малые |
снимка по произвольному направле- |
|||||||||||||||||
|
отрезки на местности (a) |
|
нию, |
|
используются |
формулы |
|
связи |
|||||||||||
|
|
на сн мке ( |
) |
|
|
|
|
|
|||||||||||
|
|
|
|
|
координат точек снимка и местности, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
при выводе которых коорд натные оси ox и OX совмещаются с глав- |
|||||||||||||||||||
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
||||||
ной верт калью |
ее проекц ей. |
|
|
|
|
|
|
|
|
|
|
||||||||
|
После преобразован й формула |
масштаба снимка в точке с ко- |
|||||||||||||||||
ординатами x, y по |
|
вольному направлению примет вид |
|
|
|||||||||||||||
|
произ |
|
|
|
k 2 |
|
|
|
|
|
|
|
|||||||
С |
|
|
1 |
f |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
m |
= H |
|
cos2 φ + (k sin φ + c cos φ)2 |
, |
|
|
(3.29) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
88 |
|
|
|
|
|
|
|
|
|
где
k = (cosαc − |
x |
sinαc ), |
c = |
y |
sinαc . |
|
|
||||
|
f |
|
f |
||
Выполним анализ формулы (3.29), получим формулы масштаба в основных точках снимка по главной вертикали и по горизонталям.
1. Снимок горизонтальный |
|
|
(αс= |
|
|
0). Подстановка αc |
дает |
|||||||||||||||||||||||||||||||||||||||
k = 1; c = 0. Вместо выражения (3.29) будем иметь |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
= |
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.30) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Следовательно, масштаб горизонтального снимка плоской мест- |
||||||||||||||||||||||||||||||||||||||||||||||
ности – величина постоянная, не зависящая от положения точки. |
||||||||||||||||||||||||||||||||||||||||||||||
2. Масштаб по главной вертикали |
(y = 0; ϕ = 0). Подста- |
|||||||||||||||||||||||||||||||||||||||||||||
новка в выражение (3.29) дает |
|
|
k=cosαc |
и c=0. Тогда формула мас- |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
И |
||||||||||||||||||||||||||||||
штаба по главной вертикали |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 |
|
= |
|
|
f |
|
k |
2 |
= |
|
|
|
f |
|
|
(cosαc − |
|
x |
sin αc ) |
2 |
|
||||||||||||||||||||||||
|
|
mVV |
|
|
H |
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|||||||||
3. Масштаб по горизонталям |
|
(ϕ = 90°). Подкоренное выра- |
||||||||||||||||||||||||||||||||||||||||||||
|
масштаб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
жение в знаменателе формулы (3.29) равно k, искомый масштаб |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
|
f |
|
k |
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
Дx |
|
||||||||||||||||||||
|
|
|
mhh |
= |
|
H |
= |
|
H |
(cosαc |
− |
f |
|
|
sin αc ) . |
|
|
(3.32) |
||||||||||||||||||||||||||||
Как |
, |
|
|
|
|
|
|
|
|
|
по лю ой горизонтали является величиной |
|||||||||||||||||||||||||||||||||||
видно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
постоянной, что подтверждает перспектива сетки квадратов. |
|
|||||||||||||||||||||||||||||||||||||||||||||
Действуя аналог чно, можно получить формулы для расчета |
||||||||||||||||||||||||||||||||||||||||||||||
масштаба по главной вертикали и горизонталям в основных точках. |
||||||||||||||||||||||||||||||||||||||||||||||
Масштаб в точке нулевых искажений. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
С |
в в (3.29) |
|
y=0; oc= x = –f(1–cosα)/sinα согласно(3.40), |
|||||||||||||||||||||||||||||||||||||||||||
Подстав |
|
|||||||||||||||||||||||||||||||||||||||||||||
k=1; c=0, получ м |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
m |
|
= m |
hh |
= |
H |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.33) |
||||||||||||||||||
|
|
|
|
|
|
|
|
VV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Масштаб в точке надира (x= – ftgα; k=1/cosα; c=0): |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
= |
|
|
|
|
|
|
f |
|
|
|
|
|
|
, |
|
|
|
|
|
|
1 |
|
= |
|
|
|
|
|
f |
|
. |
|
|
(3.34) |
|||||||||
|
|
|
m |
|
H cos2 α |
c |
|
|
|
|
m |
hh |
|
|
H cosα |
|
|
|
||||||||||||||||||||||||||||
|
|
|
VV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
||||
Масштаб в главной точке снимка (x=0; k=cosα; c=0): |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
= |
|
|
f |
|
cos2 |
|
αc |
, |
|
|
|
|
|
1 |
|
= |
|
|
f |
cosαc . |
|
|
(3.35) |
||||||||||||||||||||
|
|
|
mVV |
|
H |
|
|
|
|
|
|
|
|
|
H |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mhh |
|
|
|
|
|
|
|
|
|
|
||||||||||||
89
4. Изменение масштаба в пределах аэроснимка можно получить, определив разность масштабов по главной вертикали в двух симметрично расположенных точках с абсциссами +x и –x:
|
1 |
− |
1 |
= |
f |
[(cosαc + |
x |
sinαc )2 |
− (cosαc − |
x |
sinαc )2 ]. |
|
|
|
H |
f |
f |
||||||
|
m1 |
m2 |
|
|
|
|
|||||
После несложных преобразований, полагая с достаточной для |
|||||||||||
приближенных оценок точностью, что средний масштаб аэроснимка определяется по формуле (3.33):
∆m |
= 4 |
xα′ |
|
|
|
c |
. |
(3.36) |
|
m |
fρ′ |
|||
Расчеты по этой формуле показывают, что при x=f и αc=30′ относительное изменение масштаба составит около 1/30. С такой же точностью будут определены и длины измеренных на снимке линий. Следовательно, выполнять измерения по контактным аэроснимкам с
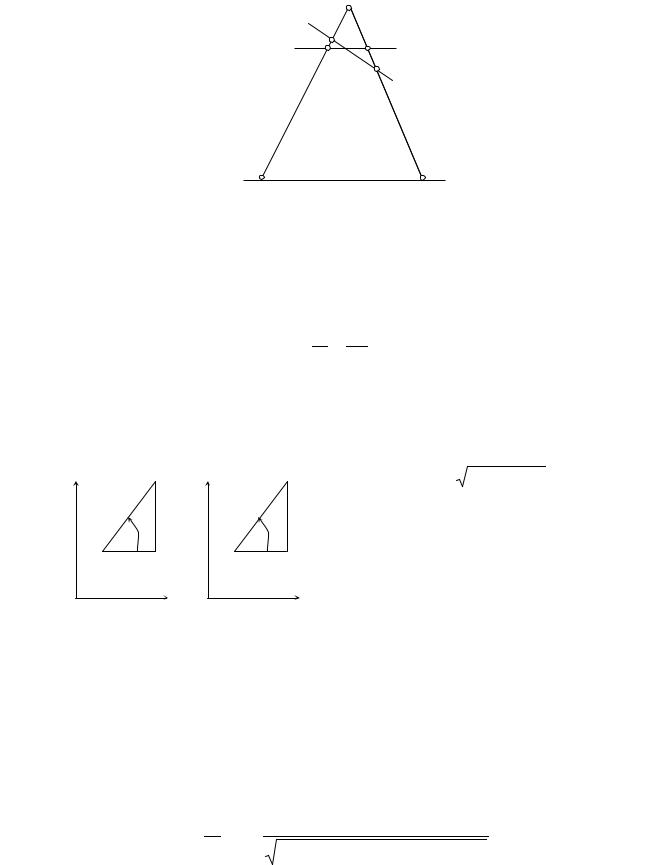
Пусть наклонный P и горизонтальный P0 снимки получены одной съемочной камерой, имеют общий центр проекции S (рис. 3.6, а), а
использованием их среднего масштаба нужно весьма осторожно. |
||
|
И |
|
3.7. Линейные искажения, вызванные влиянием |
||
угла наклона аэроснимка |
|
|
Д |
0 |
|
А |
|
|
точка местности M изо разилась на них в виде точек m и m . |
Такие |
||||||
снимки пересекаются по линии неискаженных масштабов hchc. |
P0 |
||||||
Поскольку |
изо ражение |
горизонтального |
|
снимка |
|||
соответствует ортогональной проекции, его можно |
рассматривать |
||||||
как предметную плоскость, а линию неискаженных масштабов – |
|||||||
как основан е карт ны. |
|
|
|
|
|
|
|
С учетом этого получим эпюр сложения (рис. 3.6, б), |
|||||||
С |
|
картинной |
плоскости |
и |
плоскости |
||
выполн в вращен е |
|||||||
действ тельногобгоризонта согласно условиям теоремы Шаля. На |
|||||||
эпюре сложен я центр проекции |
S |
совместится с точкой нулевых |
|||||
скажен й c, которая в данном случае будет |
одновременно и |
|
главной точкой основания картинной плоскости, |
а точки m и m0 |
|
окажутсяимилежащ |
на одном проектирующем луче Smm0. |
|
90
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
hi |
|
|
|
i |
hi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
||
|
|
|
|
|
|
|
|
αc |
|
|
|
|
|
|
|
m |
|
0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
i |
|
P |
|
2hc |
|
|
|
|
|
|
|
|
|
P , |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P, |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−δα |
|
|||||
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
P |
o |
|
ϕ |
E′ |
|
||
|
|
|
|
m |
r |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
m |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
xo |
|
|
|
|
|||||
|
|
mo |
|
|
r o |
c |
n |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
hc |
|
|
|
|
|
|
|
|
|
|
|
|
r |
ϕ |
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
S, c |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hc |
|
hc |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
||
Рис. 3.6. Линейные искажения, вызванные влиянием угла наклона |
|||||||||||||||||||||
|
|
|
|
аэроснимка на пространственном чертеже (a) |
|
||||||||||||||||
|
|
|
|
|
|
|
и на эпюре сложения (б) |
|
|
|
|
|
|||||||||
Обозначим удаления точек m и m0 от точки нулевых искажений |
|||||||||||||||||||||
через r и r0 соответственно. Тогда искажение δα =r –r0 («практическое |
|||||||||||||||||||||
значение минус теоретическое»), а mm0=−δα. |
|
|
|
|
|
||||||||||||||||
Из подобных треугольников mm0k и icm можно записать: |
|
||||||||||||||||||||
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
И |
|
|
mm / m k = mc / ic , |
или |
|
|
mm |
|
= m k × mc |
|
|||||||||||||
|
|
|
|
/ ic . |
|
||||||||||||||||
Поскольку mc=rc; ic=f/sinαc и m0k =r0cosϕ , то |
|
|
|||||||||||||||||||
|
|
|
|
|
|
δα |
= − |
r r |
0 |
|
|
|
|
|
|
|
|
|
|
|
(3.37) |
|
|
|
|
|
|
с с |
sin αc cosφ . |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
Д |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Эта формула определяет величину искажения, вызванного влия- |
|||||||||||||||||||||
нием угла наклона снимка, или перспективного искажения. В таком |
|||||||||||||||||||||
виде эта формула применяется в конструкциях ряда фотограмметри- |
|||||||||||||||||||||
ческих |
оров. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если в правой части формулыА(3.37) заменить r0 на r – δα, то по- |
|||||||||||||||||||||
сле несложных прео разований получим окончательно |
|
||||||||||||||||||||
|
|
|
|
|
δα |
|
r2 sinα |
c |
cosφ |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
c |
|
|
|
|
cosφ . |
|
|
|
|
|
||||
|
|
|
|
|
= − f − r |
sinα |
c |
|
|
|
|
(3.38) |
|||||||||
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
Опуст |
|
|
б |
|
|
|
|
|
|
|
что оправдано при ис- |
||||||||||
в в знаменателе второе слагаемое, |
|||||||||||||||||||||
пользован |
|
плановых снимков, получим |
|
|
|
|
|
||||||||||||||
прибδα = − rc2 sinαc cosφ . |
|
|
|
|
(3.39) |
||||||||||||||||
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
При αc=10; f=rc= 100 мм и ϕ = 0 найдем, что δα=1,75 мм. |
|
||||||||||||||||||||
Индекс c в обозначении радиуса-вектора r напоминает, что он |
|||||||||||||||||||||
отсчитывается от точки нулевых искажений, а угол ϕ – от по- |
|||||||||||||||||||||
ложительного направления главной вертикали против хода часовой |
|||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стрелки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
91 |
|
|
|
|
|
|
|
|
|
|
|

Легко видеть, что максимальное искажение δα имеют точки, расположенные на главной вертикали (cosϕ=±1), причем при αc< 3°:
δαmax = |
|
rc2αc′ |
|
. |
|
(3.40) |
||
|
fρ′ |
|
|
|||||
|
|
|
|
|
|
|
||
По формуле (3.40) можно вычислить радиус полезной пло- |
||||||||
|
|
|
|
|
|
|
И |
|
щади аэроснимка r, в пределах которого максимальное искажение δα |
||||||||
не превысит заданного значения ∆α.. Заменив в выражении (3.40) rc на |
||||||||
r и δα на ∆α, получим |
|
|
|
|
|
|
|
|
r = |
f |
|
αρ′ |
|
|
Д |
|
|
|
α′c |
. |
|
(3.41) |
||||
|
|
|
||||||
При ∆α=0,3 мм, αc=30′ и f=100 мм r = 58,5 мм, а при f=200 мм r= 82,3 мм.
Анализ полученных формул позволяет сделать несколько выводов: 1. Величина искаженияА|δα | тем больше, чем больше угол на - клона αc и чем меньше фокусное расстояние съемочной камеры f. При постоянных значениях αc и f величина искажения зависит от поло-
жения точки на снимке, т.е. от величин угла ϕ и радиуса-вектора rc. 2. Полезная площадь планового аэроснимка близка к его рабо-
чей площади.
3. На линии неискаженных масштабов hchc величины искажений
δα равны нулю (cosϕ=0), и масштаб ее изображения соответствует |
|
ризонтальногоРанее было показано, что аэроснимок является изображением |
|
масштабу го |
снимка. |
4. Дл на отрезка, с мметричного относительно точки нулевых |
|
скажен й, не |
скажается: углы ϕ для концов отрезка различаются на |
180°, а х скажен я равны по величине и противоположны по знаку.
Смещен |
я точек, вызванные влиянием угла наклона снимка, |
полностью устраняютсябв процессе его трансформирования. |
|
3.8. Л нейные скажения, вызванные влиянием |
|
|
рельефа местности |
местности в центральной проекции, а топографический план – в ортогональной и что эти проекции совпадают только в случаях, когда снимок горизонтальный, а местность равнинная.
На рис. 3.7 изображен горизонтальный снимок P0 всхолмленной местности, полученный с высоты H над плоскостью E. Точки местности A и B, имеющие превышения над плоскостью E соответственно +h и –h,
92
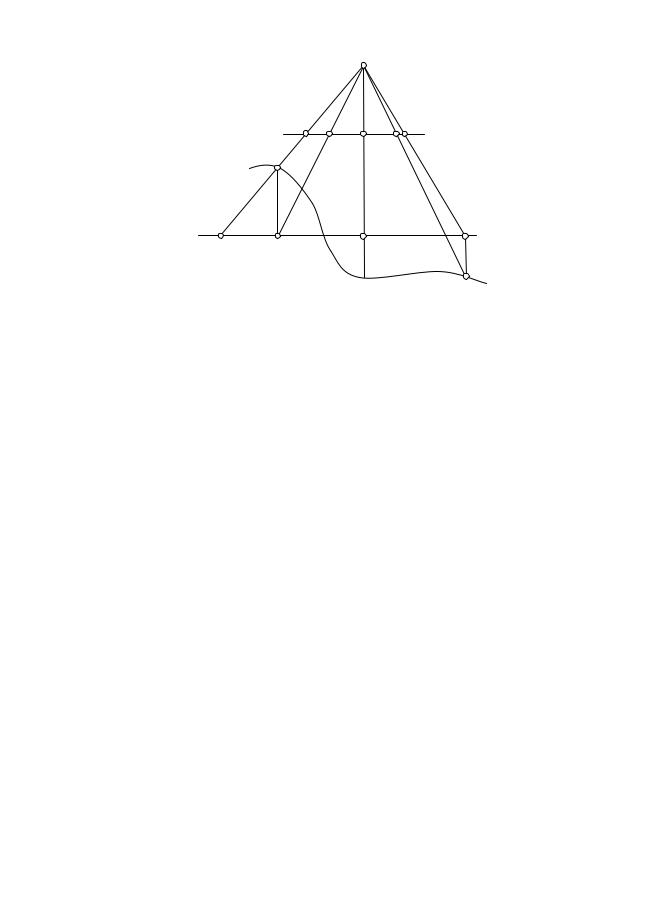
изобразились в виде точек a и b, расположенных на расстояниях oa = ra и |
||||||||||||||||
ob = rb от главной точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
P0 |
|
a |
|
|
a |
0 |
o |
b |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|||
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+hA |
|
|
|
|
|
|
O |
|
|
B0 |
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A0 |
|
|
|
|
|
|
|
|
|
|
|
||
|
A′ |
|
|
|
|
|
|
|
|
|
|
−hB |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
Рис. 3.7. Линейные смещения, вызванные |
|
|
|||||||||||||
|
влиянием рельефа местности |
|
|
|||||||||||||
Точки A0 |
и B0 являются ортогональными проекциями точек ме- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
стности A и B на предметную плоскость E; их проекции, если бы они |
||||||||||||||||
могли быть получены, располагались бы в точках a0 |
и b0. Следо- |
|||||||||||||||
вательно, отрезки aa0 |
и bb0 являются смещениями (искажениями) δh |
|||||||||||||||
точек a и b, вызванными влиянием рельефа местности. Поскольку |
||||||||||||||||
точка надира является точкой схода перспективДвсех отвесных линий, |
||||||||||||||||
эти смещения всегда совпадают с направлениями, проходящими через |
||||||||||||||||
точку надира. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для определения величины искажения δh |
рассмотрим две пары по- |
|||||||||||||||
добных треугольн ков: Soa, AA0A′ и Saa0, SA′A0, из которых следует |
||||||||||||||||
|
|
0 |
|
′ |
А |
|
|
|
||||||||
|
aa |
|
|
0 |
× So / |
SO |
= AA |
0 |
×oa / SO . |
|
|
|||||
|
|
= A A |
|
|
|
|
||||||||||
Поскольку AA0 = h; oa = r; SO = H и aa0 = δh, получим |
||||||||||||||||
|
|
|
|
|
|
|
δ |
h |
= rh |
. |
|
|
|
|
(3.42) |
|
|
б |
H |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h=50 м; r = 100 мм и H = 2000 м смещение δh=2,5 мм, что |
||||||||||||||||
больше смещен я, обусловленного влиянием угла наклона. |
||||||||||||||||
Формула (3.42) получена без учета угла наклона снимка и уже по- |
||||||||||||||||
При |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
этому не является строгой. Однако она широко применяется в фото- |
||||||||||||||||
грамметрической практике, поскольку допускаемая ошибка вычислений |
||||||||||||||||
величины искажения δh |
при плановой аэрофотосъемке не превышает |
|||||||||||||||
0,1–0,2 мм. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Заметим, что искажения точек, вызванные влиянием рельефа ме- |
||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стности, объясняются тем, что масштаб их изображения крупнее мас- |
||||||||||||||||
штаба изображения средней плоскости снимка при положительном пре- |
||||||||||||||||
93