

1671
.pdfГЛАВА 2. ГЕОМЕТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЕВКЛИДОВА ПРОСТРАНСТВА
В геометрии известны следующие методы моделирования абст рактных пространств: аналитический, конструктивный и аксиомати ческий [16, 24]. При аналитическом моделировании в зависимости от структуры исходного пространства применяют различные системы координат. В случае евклидова пространства, характеризующегося линейной структурой, применяются: декартова, сферическая, цилинд рическая системы координат. Для аффинного и проективного про странств применяются соответственно косоугольная и проективная системы координат. Для моделирования линейчатого пространства с основным объектом - прямой линией, характеризующеюся квадра тичной структурой, применяют плкжкеровы координаты, удовлетво ряющие однородному квадратному уравнению [17, 28].
Вслучае конструктивного моделирования исходное пространство
иего модель связаны некоторой проекционной системой, включаю щей проецирующие линии и поверхности. Такое моделирования дос таточно очевидно и наглядно. Оно является основным методом ис следования в классической начертательной геометрии.
При аксиоматическом моделировании отсутствует конструктив ная проекционная связь между исходным пространством и его моде лью - пространством образов. Важным критерием существования ак сиоматической модели исходного пространства является равенство размерностей основного объекта пространства и его образа на модели
исохранение структуры пространства на его модели.
2.1.Конструктивные модели пространства Еп
В главе 1 было показано, что операция проецирования устанав ливает однозначное отображение точек {А е £ „ ) - » (Л'е П2), однако она не позволяет установить обратное отображение А'-+ А. Поэтому утверждается, что поле точек 112 не является моделью пространства Еп. С практической точки зрения чрезвычайно важно, чтобы отобра жение Е„ —> П2 было взаимно однозначным почти для всего про странства Еп. Термин "почти" означает, что отображение Еп <-> П2 будет взаимно однозначным кроме конечного числа подпространств Е„ и конечного числа точек и прямых плоскости П2. Если такое ото-
40
бражение получено, то говорят, что построена обратимая модель про странства £„ на плоскости П2. Смысл обратимости состоит в том, что по заданному образу точки на П2 можно восстановить прообраз этой точки в Е„. Однако образом не может быть точка, так как двух
параметрическое множество точек П2 не эквивалентно п |
парамет |
рическому множеству точек Еп: оо2 Ф С О " . Следовательно, |
образом |
должна быть некая фигура Ф е П2, состоящая из конечного числа то чек и прямых, связанных условиями инцидентности в определенном порядке. Например, это может быть к точек (А:-вершинник, полный к -угольник) или к прямых (А-сторонник), пригодные для модели рования четномсрных пространств Е2к, это могут быть кривые (ок ружности, параболы, эллипсы и гиперболы для моделирования £ 3 , Е4, Е5 соответственно), множества кривых и др.
Поскольку в данной главе мы имеем дело с линейным простран ством, то использовать в качестве образов кривые линии нет необхо димости. Ограничимся только фигурами, состоящими из точек и пря
мых. Пусть пространство Еп |
четномерно: п = 2к. Тогда, используя к |
|||||||
операций |
проецирования |
из |
( я - З ) - м е р н ы х центров |
5,',_3, i-\,...,k |
||||
на плоскость П2, получим |
к |
точек А' е П2 |
в качестве |
образа точки |
||||
А € 5„ . Возникает |
вопрос, |
как |
должны |
быть |
выбраны центры |
|||
{Sl,_3}<zE„, |
чтобы |
отображение |
(А е Е„) О |
({А1} |
с Пг) |
было обра |
||
тимым? Для ответа на него будем рассуждать следующим образом.
Пусть |
5^_3 выбраны в |
Е„ совершенно независимо друг от друга. То- |
|||
, |
i |
|
к . |
|
Yi |
гда /А[ ,S'N_3) = PLN_2. Можно заметить, что Г\К-2 = Л, где к = |
. Дей- |
||||
СТВИТеЛЬНО, Р^2Г\Рп-2 |
- En-4 ' |
En~S\Pn-2 = Еп-Ь > |
Еп-бС\Р*-2 |
= Е п - К > |
|
En |
2kl2f)P*-2 =Еп-2к |
=Ео =А- |
Таким образом, |
условие |
обрати |
мости модели пространства Еп |
для точки удовлетворяется. По удов |
||||
летворяется ли условие обратимости для прямой? Прямая задается
двумя точками |
А е Ел |
и |
В е £ „ , |
А Ф В. Те же к |
операций проециро |
|
вания породят на П2 |
к |
образов прямых /т"В', для которых будет со |
||||
блюдаться |
проективное |
соответствие |
точечных |
рядов: |
||
(А,В,С,...)л(А',В',С,...), i |
= |
l, |
к. Следовательно, на |
П2 будут |
||
|
|
|
|
41 |
|
|
порождаться проективные соответствия |
рядов (А |
,В ,С ,...)л |
|
л(А2 ,В2 ,С2 ,...)л... л(Ак ,Вк ,Ск,...). Но |
эти |
проективные |
соответст |
вия будут служить моделью прямой |
АВ в том случае, если будут из |
||
вестны по три точки из каждого точечного ряда. А наша конструкция
позволяет иметь на |
П2 только по две точки А' и В', так как |
S'„_3f]n2 = 0 - Таким |
образом, условие обратимости модели для пря |
мой не удовлетворяется. Следовательно, центры проецирования S'n_3
не могут выбираться в |
Еп |
произвольно, независимо друг от друга. |
|
||||||||||||||
|
Рассмотрим |
другой |
случай. |
|
Пусть |
{ ^ . , } с Р „ _ 2 с £ й . |
Тогда |
||||||||||
Р„_2Г)П2=0. |
Пусть |
выбрана |
точка |
ЛеЕ„, |
|
А^РП_^. |
Тогда |
||||||||||
(А, Рп_2\ - Рп_: |
|
и |
РП_ХГ\П2=ЬХ, |
ОеЦ. |
Имеем |
следующее: |
|||||||||||
(A, S'„.3) = |
PJ, |
2 с Р„ .,, |
|
Р1_2П Ц |
= А1 . |
|
Следовательно, |
А1 е L,, |
|||||||||
/ = 1,...,и-1. |
Моделью |
точки |
АеЕп |
на |
112 |
будет |
множество |
точек |
|||||||||
А' б L,. Проверим обратимость модели. Пусть произвольно |
заданы |
||||||||||||||||
точки |
|
А' € £ , ; |
/ = |
|
- 1 . |
|
Имеем |
[A\S'^3) = />п'_2 |
с Р„ |
,, |
|||||||
^ 2 0 ^ 2 = ^ . 3 ^ ^ - 1 , |
^ - з П ^ - 2 = ^ - 4 с : Р п |
|
.... |
Я , П С " 2 |
= |
||||||||||||
= £<, |
= |
/1 е |
|
. Таким |
образом, |
модель точки |
АеЕ„, |
представляю |
|||||||||
щая |
собой |
множество |
A' |
e i , , |
L, |
э 0 . i |
= l,,..,n-\, |
является обратимой |
|||||||||
для точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Проверим |
обратимость |
модели |
для |
|
прямой |
АВсЕп, |
|||||||||||
ABf}P„ : - 0 - |
Будем иметь: (А, В, С,...) л (А1, В',С',...), / |
= 1, . . . , « - 1 , |
|||||||||||||||
(A,B,C,-)A(Lf,Lf,!!{,...). |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Поскольку |
Ц*эО, |
|
i f a O , |
|
эО, |
|
то |
(Л1 ,5! ,С',...)л |
|||||||||
л(А~,В |
,С2,...)л...л(А"~},В"~1,С"~Л,...). |
|
Перспективное |
соответст |
|||||||||||||
вие точечных рядов задается двумя парами соответственных точек, поэтому получаемая модель обратима для прямой АВ. Из этого непо средственно следует, что модель обратима для двух пересекающихся прямых, т.е. - для плоскости, для трех пересекающихся в одной точке
прямых, т.е. - для 3-плоскости и т.д. |
|
|
|
|||
|
Изменим рассмотренную конструкцию таким образом, чтобы мо |
|||||
дель |
точки |
А |
представляла |
собой |
множество |
точек |
[ U ' j c / ^ a O l U |
|
\А"-2&И2\, А"-2е1л, |
i = l, |
. . . , « - 3 . Это |
означа- |
|
|
|
|
42 |
|
|
|
ет, что центры проецирования |
S'n_2 cz Р„^2, но S^_2 cztP„,2. Тогда для |
|||||||||||||||||||||
любой точки |
А е Еп, |
А& Рп_2 |
получим |
выбранную модель, |
которую |
|||||||||||||||||
проверим |
на обратимость. Для множества точек |
j^'jczL,, |
Lj э 0 по |
|||||||||||||||||||
лучим i подпространств Р„' _ 2 сР и _ ,, пересечением которых |
будет |
|||||||||||||||||||||
единственное |
подпространство |
Е2аРпА. Тогда |
E2f](^An'2 ,S",Z2) |
= |
||||||||||||||||||
= Е0 = А, |
Л е Рп л. Следовательно, модель обратима для точки. |
|
|
|||||||||||||||||||
|
Чтобы |
получить |
обратимость |
модели |
для |
прямой |
АВ, |
на |
||||||||||||||
плоскости |
П2 |
необходимо |
получить |
|
исключенную |
|
точку |
|||||||||||||||
О = Р„-2Г\П2, которая будет центром пучка прямых |
(Ц, |
Lf, |
L\ |
, |
...) |
л |
||||||||||||||||
л (А, В, С, ...), и исключенную прямую т = P„_.xf\ll2, |
которая будет |
|||||||||||||||||||||
носителем третьих точек проективных рядов |
{А"'2, |
В"~2, М" |
2, |
...) |
л |
|||||||||||||||||
(А, |
В, |
М, |
...), |
где М = АВ |
f]P„_x. При |
этом |
Оет. Прямая |
АВ с Е„, |
||||||||||||||
AB(Z.Pn2, |
будет |
иметь |
моделью |
|
соответственные |
точечные |
ряды |
|||||||||||||||
(А, |
В, |
С, |
..АлЩ', |
I», |
4', |
...), |
|
|
(А\ |
В\СХ, |
...) л (А2,В2,С\ |
•••) |
л |
|||||||||
X |
...л (А"'3, В"~\ |
С"-3, ...), |
|
(А, |
В, |
М, |
...)л |
(Ли_2, В"'2, |
М" |
2, ..,), |
||||||||||||
(А"~2,В"~2,МП-2, ... )л {AZ,B\M\ |
...), |
|
где |
М' = Л*В'Г\т, |
i = |
1, |
|
|||||||||||||||
п - 3. Это возможно в том случае, если центр |
S"Zl |
будет относитель |
||||||||||||||||||||
но |
Р„_2 |
не |
в |
общем |
положении, |
а |
|
в |
частном. |
Именно, |
||||||||||||
SnJ\\P„.2 |
= |
S"„-J. |
Тогда (s"n:lPn_2) |
= |
Pn_x. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
Пусть |
модель |
точки |
|
А |
представляет |
|
собой |
множество |
|||||||||||||
[A1 |
cLx |
эО] |
IJ |
К'- 4 |
е Л 2 , / |
3 |
е Я 2 ] , |
А"~4 eLx, |
|
А П Ы Ц , |
|
/ |
= 1, |
|
|
|||||||
n - 5. Рассуждая аналогично, можно доказать ее обратимость. |
|
|
|
|||||||||||||||||||
|
Моделью |
прямой |
АВ с Ел, АВ <Х Рп2 |
будут |
па |
|
П2 |
соответст |
||||||||||||||
венные точечные ряды, аналогичные приведенным выше. Однако
центры 5^Г3 |
и 5*^ J должны быть не в общем положении относитель- |
|||||
но |
и |
относительно друг друга, а - в частном. А именно, |
||||
необходимо, |
чтобы |
S"Z$ П Р„ |
г - |
> |
s"-l\\Pn-2 ~ |
|
[S"Z*,Р„-2) |
= |
(Зп-1>рп-г) = |
Рп-\ - в э т о м |
слУчае |
модель будет обрати |
|
ма для прямой.
43
Продолжая этот процесс, мы придем к выводу, что вес центры
проецирования о„_3, i = l, должны принадлежать гиперплоско
сти Рп_{ пространства # я .
Пусть пространство Еп нечетномерно: « = 3,5,7,.... Тогда усло вие расположения центров проецирования {S'n 3} с Рп_2 с Еп, i = 1,..., п-1, порождает обратимую модель на плоскости П2 • Доказательство этому будет аналогично доказательству в случае четномерного про странства.
Выводя из подпространства Рп_2 |
центры S'n_3 один за другим, |
|
получим модель, состоящую из точек |
[{А'\ с Ll,Ll э 0] (J |
[А' е / / , ] , |
А> г А,, 0 = Р я _ 2 П Я 2 , £ , = Р И . , П ^ 2 - |
|
|
Существование гиперплоскости |
необходимо для |
выполне |
ния условия проективности точечных рядов при получении модели
прямой |
пространства |
Е„. В конечном итоге будут получены точки |
|
|
п-1 |
|
|
А' е Я : , |
j = 1, |
и прямая |
с Я ; , L, эО. Центры проекций |
5,',..3 и Рп 2 должны располагаться в одной гиперплоскости Р„_,. Подробное исследование таких конструкций выходит за рамки
настоящей книги. Поэтому рассмотрим более подробно только одну из них, а именно ту, у которой [S'n_~} с: Рп_2 с Еп, и независимо от размерности пространства.
Пусть в пространстве Еп задана декартова система координат Оххх2...хп. Пусть плоскость проекций Я, совпадает с плоскостью Оххх2. Тогда оси 0х(, / = 3,...,«, будут перпендикулярны плоскости Я2 = Оххх2. Пусть проецирование на Я2 будет ортогональным. Тогда центры проецирований S'n_2 должны быть бесконечно удаленными и должны принадлежать (я - 2)-плоскостям в следующем порядке:
S^3 |
с:<9л3...х„, |
|
5„'_з |
с Ох2х4 |
' |
б1^'^ |
с О ь ^ Х |
/ . . . ! . . |
Эти центры порождают следующие проекции:
Лр51,« ( А ) = Л е 0xix2 = п \ ,
п-Ъ
Пр 2^А) = А2еОх1х3=П2,
Up 3/а (А) = А3е ОхххА = II3,
'V-3
Л/Vi,» (4) = Л-1 е <?*л = •
«-3
Поскольку все эти проекции двумерны, то обозначать размер ность нижним индексом нет смысла. Поэтому, следуя традиции, ниж ний индекс будет обозначать порядковый номер проекций.
Так как у всех проекций есть общая ось Ох,, то плоскости П2,....,П„-\ можно развернуть вокруг оси Ох{ на 90° до совпадения с плоскостью проекций /У,. Тогда оси Ох2,Ох3,...,Ох„_1 совпадут. Та ким образом, модель пространства будет иметь две оси: ось Ох, и перпендикулярную ей ось Ох2 = Ох3 = ... = Ох„.л.
2.2.Аксиоматические модели пространства Ен
Из того, что было изложено в п.п. 2.1, следует, что в пространст ве Е„ должны быть выделены два исключенных подпространства Р„_2 и Рп-\ > Л>-2 с Р „ ,. Построенные конструкции позволяют моде лировать все пространство Еп, кроме этих двух подпространств. Это пе означает, что на плоскости проекций нет образов, моделирующих Pn_i и Р„_х. Просто изучение этих образов есть предмет серьезного научного исследования и не является нашей задачей. Поэтому, в дан
ном случае, будем считать, что все точки подпространств Pn 2 |
и Р„_, |
||||
являются исключенными. |
|
|
|
||
|
На плоскости проекций П2 будут |
существовать два исключен |
|||
ных |
элемента: точка |
Р = |
Pn..2С\П2 и |
прямая I = РП_ХГ)П2, |
Pel. В |
силу |
приведенных в |
п.п. |
2.1 условий |
подпространства Рп^2 |
и Рп_{ |
могут быть выбраны произвольно. Это означает, что исключенные точка Р е П2 и прямая / е II2 тоже могут быть выбраны произволь ны. Таким образом, модель пространства Е„, построенная без конст- ,v руктивной связи с Еп, будет называться аксиоматической моделью.
45

Ее общий вид для точки А е Е„, А <£ РпЛ представлен на рисунке 2.1, где к + 1 + 2т = п. На рисунке 2.2 приведена модель прямой АВ е Е„, АВаР„л.
Рис. 2.1. Аксиоматическая модель пространства Еп
Рис. 2.2. Модель прямой АВ пространства Еп
Модель прямой АВ включает в себя условия перспективного и проективного соответствия точечных рядов:
(А1,Ви...)л(А1,В2,...)л...л(АК,ВК,...)> |
|
|
||
(Ai,Bi,MI,...)A(AJ,Bj,Mj,...), |
|
(2.1) |
||
i |
= l,...,k; j = |
k + \,...,m. |
|
|
Исходя из этого, можно доказать существование модели плоско |
||||
сти |
ABC с: Е„, |
АВС&Рп_л, |
модели 3-плоскости |
ABCD а Еп, |
ABCD от Рп_1 и так далее, вплоть до гиперплоскости пространства Е„. |
||||
Все 2-плоскости, 3-плоскости, |
гиперплоскости будем считать на |
|||
ходящимися в общем положении относительно проекционной систе мы, отображающей пространство Еп на плоскость.
Сначала покажем, что представляют собой модели перечислен ных подпространств, а потом подтвердим эти модели расчетом пара метров.
Пусть требуется построить модель 2-плоскости ABC. Будем иметь:
(2.2)
В последнем соответствии прямая / соответствует сама себе.
|
3—плоскость |
задается |
четверкой |
|
независимых |
точек |
||
(A, |
B,C,D,...), |
|
моделями |
которых |
являются |
(А}, |
А2,Ат), |
|
(BvB2,...,Bm), |
(CuC2,...,Cm),(Dl,D2,...,D,„). |
На |
плоскости |
модели |
||||
существуют особые точки Ох =02 =...-Ок |
- Р, Ок+] |
el, Ок+2 |
el, |
|||||
От |
el, по отношению к которым четверки |
точек |
Ai,Bj,Ci,Di |
лежат |
||||
на соответственных лучах.
Если 3-плоскость рассматривать как однопараметрическое мно- » жество (пучок) 2-плоскостей, то на плоскости модели будут сущест вовать однопараметрические множества проективных соответствий
46 |
47 |
|
точечных полей. Тогда произвольное множество точек |
(Е,,...,Ет) бу |
||
дет |
моделировать точку Ее Рп, |
но не принадлежащую |
гиперплоско |
сти |
(ABCD). А множество |
точек (E1A1B1C1D1)A(E2A2B2C2D2)A... |
|
л(Em Am Bm Cm Dm ) будет моделью точки Е, принадлежащей гиперп
лоскости (ABCD). |
|
|
И так далее. |
|
|
Размерность множества прямых пространства Еп |
равна 2(п-\). |
|
Задание элементов модели одной точки требует I + к + 2(т - к) пара |
||
метров, двух точек - соответственно |
2[1 + к + 2(т - к)] |
параметров. |
Следовательно, 2[1 + к + 2(т - к)] = 2и. |
Проективность |
прямолиней |
ных рядов задается двумя парами точек (третья лежит на исключен ной прямой / ) . Поэтому имеем 2п - 2 = 2(п -1).
Размерность множества плоскостей пространства Еп равна 3 ( я - 2 ) . Плоскость задается тремя точками, что на модели требует задания 3[1 + к + 2(т - it)] параметров. Проективное соответствие за дается тремя нарами точек, что требует задания 6 параметров, кото
рые необходимо |
вычесть |
из |
суммы |
параметров. |
Имеем |
З и - 6 = 3 ( и - 2 ) . |
|
|
|
|
|
Размерность |
множества |
3—плоскости |
пространства |
Е„ равна |
|
4 ( л - 3 ) . 3-плоскость задается четырьмя |
точками, что |
потребует |
|||
4[1 + к + 2{т - к)] |
параметров модели. Но модель 3-плоскости требует |
||||
задания любых двух проективных соответствий двух плоских полей, т.е. получим 4[1 + к + 2(т - к)] - 1 2 = 4и - 1 2 = 4(л - 3 ) .
И так далее.
Рассмотрим построение точки, принадлежащей заданному под пространству, используя для этого только модель пространства.
Предварительно выясним, сколько параметров можно задать произвольно. Прямая «-мерного пространства задается аналитически
системой линейных уравнений
f1(xl,x2) = О
J /2(*15*з) = °
Очевидно, что задание одного любого параметра х,,...,х„ позво ляет построить точку данной прямой.
2—плоскость и-мерного пространства аналитически задается сис темой линейных уравнений
J](xl> х2>хз) ~ О
^fn(x]'X2'Xn) ~®>
из которой видно, что произвольно можно задать любые два парамет ра.
Продолжая этот процесс, придем к выводу, что для задания точки к -плоскости произвольно можно задать к любых параметров.
Построение модели точки С, принадлежащей прямой АВ, осу ществляется на основе проективных соответствий (2.1). Для построе ния необходимо задать произвольно только один параметр, например,
задать |
прямую пучка (Р). Тогда получим к точек С, е е , С2 е е , |
||
С4 е е , |
а проективные соответствия позволят построить точки |
C/t+], |
|
Ст |
на прямых Ак+1Вк+и |
АтВт. |
|
Построение модели точки |
D, принадлежащей плоскости |
ЛВС, |
|
осуществляется следующим образом. Для построения необходимо за дать произвольно два параметра, например, задать прямую d пучка
(Р) |
и |
одну точку на ней D{€c/. |
Тогда |
проективные соответствия |
||
(2.2) позволят построить точки D2, |
D3, |
Dk+i |
и все остальные точ |
|||
ки |
Dk+2, |
Dm полей (Ak+2,Bkl2,Ck,3,l),..., |
(Ат,В„„Ст,1). |
|||
|
Построение |
модели точки |
Е, принадлежащей 3-плоскостп |
|||
ABCD, |
можно выполнить по следующему алгоритму. Для построения |
|||||
необходимо задать произвольно три параметра, например, задать
прямую е пучка ( Р ) , |
две |
точки |
на |
ней £, е е , Е2ее- Тогда проек |
||
тивные |
соответствия |
(с, d,е,/,...) |
л |
(Ck+l, Dk+), Ек+i,Мкл,,...) |
позво |
|
ляют |
выделить |
в |
иоле |
|
(Akn,Bku,Ck^,Dk^ul) |
подполе |
(Ак+1,Вк+1, Ек+\,1)- После этого можно перейти к задаче построения
точки Ek+lz(Ak+2,Bk^2,EM,l), |
Eme(Am,BmJ:m,l), т.е. к задаче |
на принадлежность точки плоскости. |
|
И так далее.
В качестве примера рассмотрим модель 3-плоскости ABCD пя тимерного пространства и построение принадлежащей ей точки Е. Пусть модель 3 -плоскости ABCD имеет вид (рис. 2.3):
0(а, Ь, с, d) - пучок прямых с центром О,
48 |
49 |

{AX,BX,CX,DX} - четыре точки 1-го поля, {A2,B2,C2,D2} - четыре точки 2-го поля.
Проективные отношения между этими множествами следующие:
(1,АХ,ВХ,СХ,..УМ1,А2,В2,С2,...), (1,Ax,Bx,Dx,^..)A(1,A2,B2,D2,...),
0(1, а,Ь,...)л (Мх ,АХ,ВХ,...), Мх =А1В1[)1, 0(1,а,с,...) л (Nx, Ах,С,,...), Nx = АхС,Г]/, 0(1,Ь, с,...) A (Lx, Вх, С,,...), Lx =ВХ С,П/.
С \
е
Рис. 2.3. Модель 3-плоскости ABCD
Произвольно задаются: луч Ое и точка Ех. Па прямой / найдется такая точка 0\, для которой четверка лучей ОхАх, 0\ВХ, 0\СХ, 0\ЕХ и четверка лучей Оа, Ob, Ос, Ое будут образовывать одно и то же сложное отношение Я. На прямой / найдется и такая точка 0\, для которой четверка лучей 0\АХ, 0\ВХ, 0\DX, 0\ЕХ и четверка лучей Оа, Ob, Od, Ое будут образовывать одно и то же, но другое, сложное отношение Я. По сложным отношениям Я и Л на прямой / находятся точки Oi и Oi, и, соответственно, лучи ОгЕ2, ОгЕ2, пересечение ко торых есть точка Е2. Следует заметить, что этот общий алгоритм не
единственный. Могут быть и другие способы построения модели точ ки Е(е,Ех,Е2).
Из всего сказанного можно сделать важные выводы:
1) если моделируемое пространство обладает линейной структу рой (пересечение любых линейных подпространств есть линейное подпространство, и линейное расширение любых линейных подпро странств есть линейное подпространство), то модель этого простран ства тоже обладает линейной структурой (все соотношения между элементами модели перспективные и проективные, т.е. линейные);
2) если размерность моделируемого пространства больше раз мерности пространства модели, то в пространстве модели должны существовать исключенные элементы (точки, прямые, плоскости, . . . ) .
Дадим важные для дальнейшего изложения определения струк
туры пространства и структуры модели. |
|
|
|
||||
1. |
Структурой |
/7-мерного |
пространства |
называется упорядо |
|||
ченный набор (аи,а1,...,ап Х,В), |
где |
at |
- множества, |
элементами ко |
|||
торых являются /'-плоскости; |
В - множество бинарных отношений, |
||||||
В £ ы,- хаг Если А е at и а е я - , |
i< j, |
то бинарное |
отношение есть |
||||
отношение инцидентности: "А |
принадлежит а" |
или |
"с/ проходит че |
||||
рез А ". |
|
|
|
|
|
|
|
2. |
Если a ( f | a - |
= ak, то структура |
пространства называется ли |
||||
нейной. В противном случае структура пространства нелинейная. Например, все точечные линейные пространства обладают ли
нейной структурой. Любое подпространство таких пространств ана литически описывается системой линейных уравнений.
Если в качестве основного элемента пространства выбрана пря мая, то такое пространство будет обладать нелинейной структурой.
3.Структурой модели «-мерного пространства на плоскости называется упорядоченный набор ({/„},\ух\,.-,{у„.х},8), где {/-} - множества, элементами которых являются плоские фигуры у у, S - множество бинарных отношений, ^с{/,}х {у.).
4.Если {ftHKi'-'fi,"} и е с л и Yij*Yi,k> J*k' то структура
модели называется линейной.
Рассмотрим модель четырехмерного пространства, основным элементом которого является точка. Пространство будет линейным, что подтверждается системой аксиом принадлежности. Докажем, что модель
50 |
51 |
A-+(AUA2); |
|
|
|
|
||
АВ |
-> |
[(Л, Я,),(А2,В2)],(Д,В{, |
М,,...) |
л (А2,В2,М2,...); |
||
л я с |
-> |
[ ( 4 д,с,), |
( 4 , |
в 2 , с 2 ) ] , |
( 4 , в,, |
с,, /,,...) л (А2, в2, с2, /2,...); |
ABCD |
-> [(/1,В,С,Д |
\(A2,B2,С2,D2)}, |
|
|||
(А, Д,,С,,/„...) л |
, £ 2 , С 2 , / 2 , . . . ) , (Л,,В,, Д,/,,...) А (Л2, Я2,D2,/2,...) |
|||||
линейна и структура пространства изоморфна структуре модели. Дей ствительно. Выполняются следующие условия:
1. Две плоскости пересекаются в точке ABCC\DEF = G. Тогда на модели получим
(А1,В1,С],1],...)л(А2,В2,С2,12,...),
( D„ £ l f F„/„...) л ( D 2 , £ 2 , F 2 |
, / 2 , . . . ) . |
Если G e ABC и G e DEF, |
то (G,, G2) должна быть и нвариант- |
ной парой в этих проективных соответствиях. Пусть /, = /2, по /, Ф12. |
|
Тогда /j = 12 есть инвариантная прямая, и, следовательно, проектив |
|
ные соответствия имеют' одну инвариантную точку, которой и будет
пара ( G | , G 2 ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. |
Прямая |
и |
гиперплоскость пересекаются в точке ABf\DEF |
= G. |
||||||||||||
В |
проективном |
|
соответствии |
( C 1 , D 1 , £ 1 , / , . . . ) - > ( C 2 , A . £ 2 , / , . . . ) |
||||||||||||
ряду (ЛХ,В1,М1,...) будет |
соответствовать |
ряд (А\ |
,В\ |
,М\ ,...), |
а |
в |
со |
|||||||||
ответствии (C],D},Fl,/,...)—>-(C2,D2,F2,l,...) |
этому |
же |
ряду |
будет |
|
со |
||||||||||
ответствовать |
|
ряд |
|
(А'\,В'\,М'\,...). |
Ряды |
|
|
(А\,В\,М\,...) |
|
и |
||||||
(Л",, В", |
|
,...) |
перспективны, |
так |
как M'2el, М"2е1, точка |
пе |
||||||||||
ресечения |
рядов |
(Cl,D])f] (АХ,ВХ) |
соответствует |
точкам |
на |
|
рядах |
|||||||||
(А'2,В'2) и (А"2,В"2), |
и соединяющая их прямая пересекает |
/ |
в |
|||||||||||||
центре перспективности. Поэтому существует точка G2 пересечения |
||||||||||||||||
рядов (А'2,В'2,М'2,...) |
и |
(А"2 ,В"2 , |
М"2 ,...), которая будет соответ |
|||||||||||||
ствовать |
сама |
себе |
и |
будет искомой |
моделью |
|
точки |
G. |
Точка |
|||||||
G, е (Л,,В}) строится по условию проективности рядов. |
|
|
|
|
||||||||||||
3. Плоскость ABC и гиперплоскость DEFG пересекаются по |
||||||||||||||||
прямой: |
ABC(~]DEFG = ML. Для |
доказательства |
|
достаточно |
дважды |
|||||||||||
повторить рассуждения предыдущего пункта.
2.3. Простейшие аксиоматические модели пространства
Очевидно, что все модели линейной структуры различны по сложности их графической реализации. Также очевидно, что про- с гейшей моделью будет та, у которой проективные соотношения за менены перспективными. То, что при этом увеличивается число эле ментов модели, не сказывается на сложности модели. Поэтому про стейшей моделью «-мерного пространства на двумерной плоскости будет: исключенная точка О, множество прямых, проходящих через
Ои несущих (п-1) точек.
Таким образом, модель точки А |
есть {Л,} с: а, О е a, i = 2, п. |
||||
Модель |
прямой |
АВ |
ecxb{Ai]cia,{Bi}czb,0&a, |
Osb,i = 2,n, |
|
l. !../>'.) А ( , ! . |
. « , ) . i*j,j = 2^i. |
|
|
_ |
|
Модель |
2-илоскости А ВС |
есть |
{At }аа, \Bi} <= Ь, {С,- } с с , / ' = 2 , я ; |
||
Оеа,ОеЬ,Оес; |
|
(А1,В1)л(А],В/), |
(Ai,CI)A(AJ,CJ), |
( Я „ С , ) л |
|
л (В,, Сj), i* |
j, и так |
далее. |
|
|
|
Рассмотрим простейшие графические модели трехмерного проек тивного пространства R.. Основным объектом пространства Я, выби раем точку. В качестве ее образа выберем пару точек на прямой пучка прямых с собственной вершиной. Проверим выполнение условия ра венства размерностей исходного пространства и его модели. В соответствии с формулой Грассмана (1.1) размерность множества
точек пространства |
Р3 |
определится следующим |
образом: |
D"' = ( 3 - 0 ) ( 0 + 1) = 3. |
Размерность множества пар точек, |
принадле |
|
жащих прямым линиям пучка, на основании формулы размерности многообразия т - плоскостей [5]:
|
|
|
Q=lLal-\m(m + \), |
|
|
(2.3) |
|||
|
|
|
|
/.=о |
2 |
|
|
|
|
удовлетворяющего |
обобщенному |
условию |
инцидентности |
||||||
е'ч'"ч\' |
«1ао' 0 П Ре Де л и т с я |
в |
символическом представлении следую |
||||||
щим |
образом: Q = Q(e2\l) + Q(2e°), где |
Q(e2°0)- размерность пучка |
|||||||
прямых, |
определяемая как |
|
<2(<4'о) = 2 - ~ 1 - ( 1 + 1) = 1; Q(2e]°)~ |
раз |
|||||
мерность |
пары |
точек |
на |
|
прямой |
пучка, |
определяемая |
как |
|
|
|
|
|
|
|
53 |
|
|
|
52
Е(2е,°) = 2[1 --- 0 - ( 0 + 1)] = 2. Таким образом Q = 1 + 2 = 3 и условие
равенства размерностей выполнимо.
Рассмотрим выполнение условия соответствия линейности ис ходного пространства и его модели. Пространство Р3, как точечное пространство, может быть рассмотрено в качестве грассманова мно гообразия. Порядок грассманова многообразия представляет собой
структурную характеристику пространства |
Р3 и может |
быть опреде |
|||||
лен на основании формулы [5]: |
|
|
|
|
|
||
|
|
_ |
2\...т\({т + \)(п-т))\ |
т |
ко |
||
\en,...,n-m + |
l,n-m-l) |
~ |
, |
ч|/ |
, 1Ч, |
,'em,...A,U |
|
|
|
|
(п-т)\уп — т + \)\..м\ |
|
|||
следующим образом |
(при |
п-3,т-0): |
(е^У |
=е*о- Справедливость по |
|||
следнего равенства следует также из его геометрического представ ления: е2 -е2 ' е 2 "' ТРИ плоскости пространства Р2 пересекаются в од ной точке. Коэффициент при е% равен 1, что говорит о линейности пространства Р3. Определим структурную характеристику рассматри ваемой модели пространства Р3. Проведем анализ размерности пар точек в пучке прямых. Па прямой линии существует двухпараметрическое множество пар точек. В пучке прямых существует трехпараметрическое множество пар точек. В центре пучка существует 0 пар точек. Таким образом, получаем следующее обобщенное условие ин цидентности для множества пар точек пучка прямых: е1 '4"о • Очевидно, это условие инцидентности, имеющее место для пучка прямых, экви валентно обобщенному условию инцидентности для связки плоско стей пространства Р3. Поскольку пара точек на прямой линии пучка и точка пространства Р3 имеют одно и то же параметрическое число, равное 3, то на основании формулы (2.4) получаем структурную ха рактеристику модели пространства Р3:
, 2 , 1 , 0 ,(2+1)(3 - 2) |
_ ,2,1,0 ,3 |
_ 2,1,0 |
. |
2,1,0 |
_ 2,1,0 |
||
Ve3,2,0/ |
— |
1^3,2,0^ |
— |
^3,1,0 |
е |
3,2,0 — |
^2,1,0 ' |
при этом коэффициент в последнем символическом выражении равен единице, то есть рассматриваемая модель также является линейной. Отметим, что полученные структурные условия е\ и е\'\\ являются единичными. Действительно, в соответствии с формулой (1.4) для каждого из них получаем:
54
,0 ,_(2-3-0).(0+1) - 2 = 1; 6 ^ . |
,02X0) = (2-3-2).(2 + 1) |
|
3,2,0-* ~ |
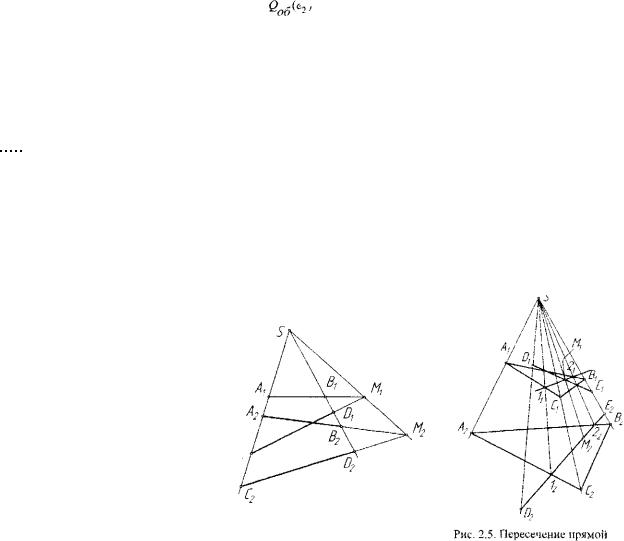
Рассмотрим на простейшей модели пространства Р3 решения позициотшых задач, например, задач на принадлежность. На рассматри ваемой модели (рис. 2.4) заданы пересекающиеся в точке М(М1,М2)
две |
прямые линии |
АВ(А1В1,А2В2) |
и |
CD(C]D],C2D2). Точка |
||
М(МХ,М2) принадлежит этой модели, поскольку ее |
проекции Мх |
и |
||||
М2 |
принадлежат одной |
прямой пучка |
(5) |
прямых. |
На рисунке |
2.5 |
приведено решение задачи определения точки пересечения прямой
DE |
и плоскости, заданной треугольником AABC(AAlBlCl,АА2В2С2). |
Для |
этих целей применена конкурирующая прямая 1,2(1|,2,; 12,22) и |
соответствующий алгоритм построений. Точка М(МХ,М2) является решением задачи.
Выберем в качестве моделируемого аффинное трехмерное про странство. Из выбора следует, что возможная графическая модель пространства должна быть определена как относительно позицион ных, так и относительно аффинных задач, то есть задач на параллель
С,
Рис. 2.4. Модель пересекающихся |
|
прямых |
и плоскости |
ность. В таком случае на модели должна быть указана несобственная прямая, точки которой будут соответствовать несобственным точкам -v
55
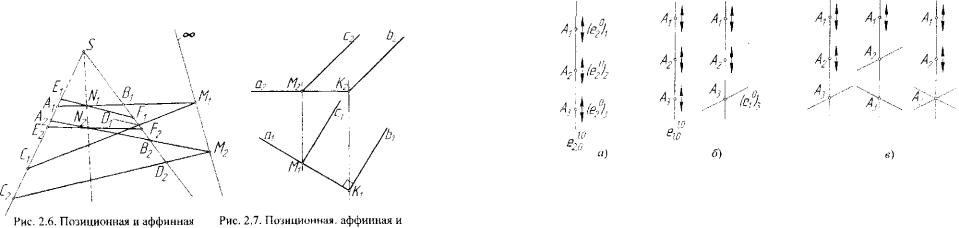
трехмерного аффинного пространства. На рисунке 2.6 приведено ре шение двух задач - позиционной и аффинной.
Прямые АВ(АХВХ,А2В2) |
и EF(EXFX,E2F2) пересекаются |
в |
точке |
|||
N(NX,N2). Прямые |
АВ и |
CD(CXDX,C2D2) |
параллельны, так |
как |
их |
|
точка пересечения |
М(МХ,М2) |
принадлежит |
несобственной |
прямой |
- |
|
образу несобственной плоскости аффинного пространства.
Частным отучаем рассматриваемой графической модели является модель трехмерного евклидова пространства, в котором выполняются решения задач трех типов: позиционных, аффинных и метрических. На рисунке 2.7 представлены задачи трех типов.
Прямые а(ах,а2) и b(bx,b2) пересекаются в точкеК(КХ,К2). Пря мые с(сх,с2) и Ъ параллельны. Прямые а и b в пространстве обра зуют прямой угол с вершиной в точке К .
задачи |
метрическая задачи |
Обобщим эти модели на |
« м е р н о е пространство и докажем их |
линейность. Для этого представим модель частного вида с исключен
ной прямой |
/°°, удаленной |
в бесконечность |
и точкой Sx e f ° . Тогда |
образ точки |
АеР" будет |
множеством At |
е ал = \,...,п — \,а ZD 5"°. |
Символически это можно записать в виде условий:
Умножив это условие на единичное п кратное условие, получим линейное условие нулевой размерности. Единичных «-кратных усло
вий |
существует два вида: |
((?,')" |
и el'lief)""1. |
|
||
|
Получим: |
|
|
|
|
|
4 > 2 ° ) , •.•••(е°2)п->х{е?Г=е2№)1 |
•...-(,">., , . ( * o V . |
или |
||||
^ 2 |
) , ••..•(e°2)n_i х е ^ |
Г 1 |
-...-(ebV.- |
|
||
|
И в том и в другом случае получена модель точки, которая явля |
|||||
ется пересечением п гиперплоскостей. |
|
|||||
|
Например, пусть п = 4. Имеем модель точки (рис. 2.8, с/) в виде |
|||||
1.0 / |
,0ч |
/ 0 Л |
/ 0ч |
|
|
|
<?2,o(e2)i |
-(«2)2 |
'(е2 )з- |
|
|
|
|
Рис. 2.8. Модель точки пространства^
Если наложить одно линейное условие, т.е. условие принадлеж
ности точки гиперплоскости, то получим (рис. 2.8, б): ). • ( 4 ) 2 • (4h или е2>°0(е2\ - (е°2)2 • (е1°)3.
При наложении двух условий, т.е. условий принадлежности двум гиперплоскостям, получим (рис. 2.8, в): е\^(е2)[-(е2)2-(е<]))3 или
^ о ( ^ ) . Mh М)ъ и™ е\1(ей2\ .(е°2)2 -{е°0)3.
И так далее.
56 |
57 |
|
ГЛАВА 3. МОДЕЛИРОВАНИЕ ТОЧКИ, ПРЯМОЙ, ПЛОСКОСТИ И ГИПЕРПЛОСКОСТИ НА ПРОСТЕЙШЕЙ ГРАФИЧЕСКОЙ МОДЕЛИ ЕВКЛИДОВА ПРОСТРАНСТВА
Вышерассмотренная простейшая графическая модель «—мерного евклидова пространства, полученная аксиоматическим путем, по су ществу представляет собой обобщение известной в начертательной геометрии модели Г. Монжа, которая была получена им конструктив ным путем. В проективной схеме метода двух изображений модель Монжа рассматривается как его частный случай [6, 16J.
3.1.Моделирование точки
Точка А |
на простейшей графической модели представлена своим |
|||||||||||
образом |
- |
« - 1 |
точками |
Ах, |
...,Ап_х, |
|
и |
|||||
принадлежащих одной прямой пучка с |
|
|||||||||||
|
|
|||||||||||
несобственным центром (рис. 3.1). В |
/л |
|
||||||||||
терминах |
|
модели |
|
Монжа |
точки |
^ |
|
|||||
А], ...,Ап |
, и прямая |
А1Ап_1 |
называются |
ZA |
|
|||||||
соответственно проекциями точки А и |
|
|||||||||||
|
|
|||||||||||
линией проекционной |
связи. Для |
мет |
X- ЛгЛз |
О |
||||||||
ризации |
графической |
модели (то |
есть |
|
||||||||
/7/ |
|
|||||||||||
возможности решения метрических за- |
/А |
|
||||||||||
дач) и ее аналитического описания, |
|
|
||||||||||
введем в |
плоскости |
модели |
оси |
коор- |
|
I у |
||||||
динат |
|
X, Y,Z,T, |
где |
X 1 YZT |
и |
|
* |
|||||
|
Рис. 3.1. Модель точки |
|||||||||||
А} Ап |
, // |
YZ, |
и |
единичный |
отрезок на |
|||||||
пространства Еп |
|
|||||||||||
осях, |
например, |
1 |
мм. В таком |
случае |
|
|||||||
|
|
|||||||||||
появляется возможность задания на рассматриваемой графической
модели декартовых координат точки |
А |
и ее |
проекций: |
||
A(xA,yA,zA,tA), |
A,(xA,yA,0J)), |
A2(xA,0.zA,0), |
А3(хА. |
О, |
0,tA). Отме |
тим, что в соответствии с конструктивным методом основным объек
том |
пространства Е, является точка, основными плоскостями проек |
||
ции |
служат координатные плоскости: |
XxZ-lI2, |
X х Y - Я,, |
X х |
z = Я j, а направление проецирования - |
ортогональное к плоско |
|
стям проекции (рис. 3.2). Если мысленно убрать основной объект - точку А и линии проецирования ААХ, АА2 и повернуть горизонталь-
58
ную плоскость проекции я, относительно оси X до совмещения с
|
|
|
|
Z |
|
|
|
|
|
|
|
Z |
|
'Пз |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
п2 |
|
|
|
|
||||
п2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
А2 |
|
|
|
г |
|
|
„ |
Аз |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УА |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ZA |
|
|
|
|
|
|
|
|
|
X- |
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
Y |
||
|
|
|
|
|
|
/7, |
|
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
'/А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Л/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
||
Рис. 3.2. Модель Монжа |
|
|
Рис. 3.3. Модель точки |
|
|
||||||||||||||
|
пространства Е3 |
|
|
|
|
|
|
пространства Е3 |
|
|
|
||||||||
фронтальной |
плоскостью |
проекции |
п2, |
то получим |
чертеж, |
пред |
|||||||||||||
ставленный |
на рисунке 3.1 |
(без |
учета П3, A3,tAnT). |
|
|
|
|
|
|
|
|||||||||
Если ввести профильную плоскость проекции |
П3 = |
|
Ух'/,, |
кото |
|||||||||||||||
рой принадлежит ортогональная |
проекция А. точки А, то |
получим |
|||||||||||||||||
дополнительно |
профильную |
проекцию |
A3(Q,yA,zA). После |
поворота |
|||||||||||||||
плоскости |
// j |
относительно оси |
Z |
до совмещения с плоскостью |
пг |
||||||||||||||
|
|
|
|
|
|
|
образуется |
чертеж, |
|
|
представ- |
||||||||
|
|
|
|
Пз |
|
ленный |
|
на |
рисунке |
3.3. Оче |
|||||||||
|
|
|
6 |
|
|
|
видно, |
|
точка |
|
А(хА ,yA,zA), |
||||||||
|
|
|
|
|
|
изображенная |
на чертеже, |
за |
|||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
нимает |
|
общее |
положение |
в |
||||||||
|
|
|
|
|
|
|
пространстве |
относительно |
|||||||||||
п2 |
в2 |
|
|
|
|
плоскостей проекции |
п\, |
Л, |
|||||||||||
Х- п, |
|
|
E2=Ei |
О |
|
|
и |
П3, так как |
ни |
|
одна |
из |
ее |
||||||
|
|
|
|
|
|
|
координат не равна нулю. Ес |
||||||||||||
|
#7 |
|
|
|
|
ли же одна из ее |
|
координат |
|||||||||||
|
|
|
|
Y |
|
равна нулю, то точка принад |
|||||||||||||
|
Рис. 3.4. Модели точек |
|
лежит |
плоскости |
|
проекции, |
|||||||||||||
|
|
например, |
точки |
|
|
В(х, у, 0); |
|||||||||||||
пространства Еъ, принадлежащих |
|
|
|||||||||||||||||
С(х, 0 , z ) ; |
D(0,y,z), |
принад |
|||||||||||||||||
|
плоскостям проекций |
|
|||||||||||||||||
|
|
лежат |
плоскостям |
|
|
проекции |
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
59 |
|
|
|
|
|
|
|
|
|
|
|
|
|