

5.3. Суперпозиция внутренних силовых факторов
Решив систему уравнений равновесия в статически неопределимой задаче (в ответ входят произвольные величины x1, х2, ...,xk, k - степень статической неопределимости), можно строить эпюры Ф методом сечений. Удобно использовать суперпозицию:
Ф =ФР+Х1Ф1+Х2Ф2+..., (5.3)
где Ф — некоторый силовой фактор в произвольном сечении z конструкции, Фр - тот же фактор в предположении, что все неизвестные Xi равны нулю; Ф1 - при нулевой внешней нагрузке и нулевых Xi, кроме одного X1 = 1; Ф2 - только от X2 = 1 (внешние силы и остальные Xi равны нулю) и т.д. Подчеркнем, что все единичные эпюры Фi отвечают состояниям самоуравновешенности. Этот термин означает наличие внутренних сил при отсутствии внешних.
5.4. Условия совместности деформаций
Статическая неопределимость задачи означает, что условий равновесия недостаточно для определения реакций в мешающих связях. Необходимо привлекать две другие стороны механики - геометрическую и физическую.
Геометрические условия - это условия совместности деформаций осевой линии Д(z). В отличие от статически определимых задач, в статически неопределимых не всякое распределение деформаций осевой линии оказывается возможным, то есть совместным (соответствующим наложенным на конструкцию связям). Для записи условий совместности удобно использовать ПВП: как отмечалось (глава 2), этот принцип заменяет геометрические ограничения, если нам известны условия равновесия. Выражение (5.3) с отвечающими условиям равновесия эпюрами ФP Фi предлагает множество равновесных состояний, среди которых эпюры Фi удобны тем, что они самоуравновешенны. Поскольку W=W' (см. пункт 2) и для самоуравновешенных состояний работа внешних сил равна нулю, то
![]() . (5.4)
. (5.4)
Это и есть условия совместности - k уравнений (столько имеется независимых самоуравновешенных эпюр Фi). Как видим, число уравнений (5.4) в точности равно недостающему количеству условий равновесия.
Однако следует иметь в виду, что так изящно выглядят условия совместности деформаций осевой линии (то есть ее отклонений от чертежа) лишь в случае, когда все опоры выполнены идеально по чертежу. В противном случае в эти условия должны входить соответствующие отклонения (их называют смещениями опор).
Для записи таких корректированных условий совместности деформаций следует, еще на стадии выбора основной системы, считать мешающими (и снимать их) все смещающиеся связи. Тогда в i-м самоуравновешенном состоянии (при Xi = 1) реакции этих связей Rim (m - номер связи) становятся "внешними силами" для основной системы и ПВП записывается в обычном виде W'=W, шт
![]() , (5.5)
, (5.5)
Это и есть условие совместности Д(z), согласованное со смещениями опор Δm.
Пример 4. В дважды статически неопределимой задаче на рис.5.11 смещаются все три связи в правой заделке. Записать условия совместности для Д(z) при заданных Δ1, Δ2, Δ3.
Решение. Выбирая основную систему, отбросим эти три связи и одну из двух оставшихся - допустим, нижнюю (рис.5.12). Кинематический анализ дает две простейшие степени свободы: двигаться по горизонтали или вращаться вокруг точки А. Условия равновесия:
![]()
![]()
 . (5.6)
. (5.6)
Д ля
определения Ri
придется ввести две произвольные
величины X1
и
Х2.
Например,
R4
= 3X1,
R1
=
3Х1
-
2Р,
R3
=
3X2·l,
R2
=
2P/3
– X1
- X2
(проверяется
подстановкой в условия (5.6)). Два
самоуравновешенных состояния – для X1
= 1
и
для X2
= 1
-
иллюстрируются рис.5.13 и 5.14: показаны
реакции опор и внутренние силовые
факторы. Условия совместности (5.5)
принимают вид (Δi
по
условию задачи равно нулю):
ля
определения Ri
придется ввести две произвольные
величины X1
и
Х2.
Например,
R4
= 3X1,
R1
=
3Х1
-
2Р,
R3
=
3X2·l,
R2
=
2P/3
– X1
- X2
(проверяется
подстановкой в условия (5.6)). Два
самоуравновешенных состояния – для X1
= 1
и
для X2
= 1
-
иллюстрируются рис.5.13 и 5.14: показаны
реакции опор и внутренние силовые
факторы. Условия совместности (5.5)
принимают вид (Δi
по
условию задачи равно нулю):
![]()
![]()
![]()

В частности, нулевые кривизна осевой линии χ и продольная деформация ε0 совместны только тогда, когда
![]() . (5.7)
. (5.7)
Решение этой последней системы уравнений имеет вид
![]() (5.8)
(5.8)
г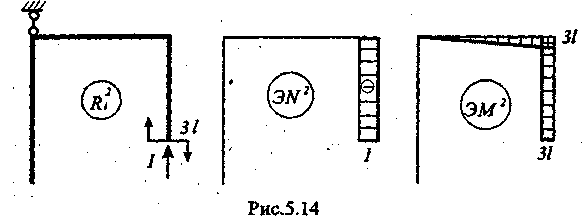 де
Х3
-
произвольная величина. При таких
смещениях опор в случае отсутствия
нагрузки и нагрева напряжения в раме,
изготовленной идеально по чертежу,
отсутствуют.
де
Х3
-
произвольная величина. При таких
смещениях опор в случае отсутствия
нагрузки и нагрева напряжения в раме,
изготовленной идеально по чертежу,
отсутствуют.