

8. Устойчивость упругих систем
8.1. Что такое критическая сила?
Рассматривая этот раздел сопротивления материалов, следует обратить внимание на следующие его особенности. Во-первых, если раньше нас интересовало лишь, при каких условиях конструкция находится в равновесии, то сейчас мы анализируем качество равновесия: оказывается, для прочности конструкции это бывает крайне важно. Если равновесие неустойчиво, то при любом малом возмущении (а избежать его практически невозможно) система переходит в другое положение, не предусмотренное условиями ее работы; при этом происходит нежелательное перераспределение усилий в ее элементах.
Во-вторых, приходится отказаться от одной из основных гипотез сопротивления материалов - гипотезы малости перемещений (называемой принципом начальных размеров), так как в рамках этой гипотезы равновесие всегда устойчиво, если устойчив материал конструкции. Таким образом, изучая по-прежнему относительно малые смещения точек тела при его нагружении, мы уже не рассматриваем их как бесконечно малые. С этим связана третья особенность: даже в пределах закона Гука задача перестает быть линейной; становится несправедливым и принцип суперпозиции.
Т ипы
равновесия проще всего увидеть на
примере весомого шарика, лежащего на
поверхности, рельеф которой показан на
рис.8.1. Здесь П
- высота рельефа как функция координаты
х;
одновременно, это. потенциальная энергия
шарика, деленная на постоянную величину
- вес шарика.
ипы
равновесия проще всего увидеть на
примере весомого шарика, лежащего на
поверхности, рельеф которой показан на
рис.8.1. Здесь П
- высота рельефа как функция координаты
х;
одновременно, это. потенциальная энергия
шарика, деленная на постоянную величину
- вес шарика.
Нетрудно видеть, что равновесие наблюдается лишь в четырех положениях из показанных пяти.
Положение 3 наиболее типично для механических систем (простейшую из которых мы рассматриваем): это устойчивое равновесие. Малые возмущения, смещающие шарик влево или вправо, выводят его из начального положения равновесия и переводят в смежное положение - бесконечно близкое к исходному, но после их снятия шарик возвращается в исходное положение.
Положение 4 в этом отношении наиболее неприятно: любое малое возмущение выводит шарик из положения равновесия, и он скатывается до нахождения другого. Такое состояние системы называется неустойчивым равновесием.
Особое место занимает состояние безразличного равновесия 5. Это - единственная ситуация, когда смена положения не нарушает равновесия. Переход конструкции из устойчивого состояния в неустойчивое (при росте нагрузки) проходит через эту фазу, называемую критической; определение соответствующего (критического) значения нагрузки и представляет обычно задачу расчетчика.
Наконец,
встречается "устойчивое в малом"
состояние 1; оно в механике почти не
изучается. Здесь при малых в озмущениях
шарик устойчив, однако, если возмущения
больше некоторых небольших, но конечных
величин, то происходит потеря данной
формы равновесия.
озмущениях
шарик устойчив, однако, если возмущения
больше некоторых небольших, но конечных
величин, то происходит потеря данной
формы равновесия.
Нетрудно заметить, что в положении равновесия шарик обладает минимальной в данной окрестности потенциальной энергией. В безразличном состоянии потенциальная энергия не изменяется при смене положения.
Д ля
деформируемых
конструкций
ситуация аналогична, если считать, что
величина П
состоит
из потенциальной энергии положения
(связанной с положением точки приложения
силы) и потенциальной энергии деформации.
Эту сумму называют полной потенциальной
энергией системы. Все приведенные выше
соображения о видах равновесия (или
неравновесия) остаются в силе, но рельеф
поверхности П
зависит
от значений действующих сил. При невысоких
нагрузках конструкция обычно устойчива,
но при возрастании нагрузки (или
температуры, или параметра кинематического
воздействия) до некоторой величины
ситуация изменяется: появляется новое,
близкое к начальному (смежное), состояние
равновесия конструкции, причем прежнее
остается равновесным (бифуркация) или
оказывается неравновесным, и конструкция,
меняя свою форму, переходит в новое
состояние равновесия. Это значение
параметра нагрузки называют критическим.
ля
деформируемых
конструкций
ситуация аналогична, если считать, что
величина П
состоит
из потенциальной энергии положения
(связанной с положением точки приложения
силы) и потенциальной энергии деформации.
Эту сумму называют полной потенциальной
энергией системы. Все приведенные выше
соображения о видах равновесия (или
неравновесия) остаются в силе, но рельеф
поверхности П
зависит
от значений действующих сил. При невысоких
нагрузках конструкция обычно устойчива,
но при возрастании нагрузки (или
температуры, или параметра кинематического
воздействия) до некоторой величины
ситуация изменяется: появляется новое,
близкое к начальному (смежное), состояние
равновесия конструкции, причем прежнее
остается равновесным (бифуркация) или
оказывается неравновесным, и конструкция,
меняя свою форму, переходит в новое
состояние равновесия. Это значение
параметра нагрузки называют критическим.
В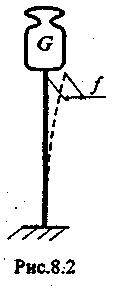 частности, при сжатии прямого вертикального
стержня (задача Эйлера, рис.8.2) грузом G
состояние
системы «стержень - груз» характеризуется
стрелой прогиба f.
При
невысокой нагрузке устойчивое состояние
является прямолинейным (f
= 0).
Это
можно увидеть из энергетического рельефа
(рис.8.3), где П
-
потенциальная энергия груза в сумме с
энергией сжатия стойки (практически не
зависящей от f)
и энергией изгиба стойки, пропорциональной
квадрату f,
Уменьшение высоты стойки при ее изгибе
(и, соответственно, уменьшение потенциальной
энергии груза) также пропорционально
квадрату f,
поэтому
рельеф описывается квадратичной
параболой. Пока груз невелик, с ростом
прогиба величина П
возрастает
(потенциальная энергия изгиба растет
быстрее, чем убывает потенциальная
энергия груза, рис.8.За), но при большом
весе груза ситуация обратна (рис.8.3 в).
Критическому значению нагрузки G
=
G*
отвечает промежуточная ситуация (рис.8.3
б).
частности, при сжатии прямого вертикального
стержня (задача Эйлера, рис.8.2) грузом G
состояние
системы «стержень - груз» характеризуется
стрелой прогиба f.
При
невысокой нагрузке устойчивое состояние
является прямолинейным (f
= 0).
Это
можно увидеть из энергетического рельефа
(рис.8.3), где П
-
потенциальная энергия груза в сумме с
энергией сжатия стойки (практически не
зависящей от f)
и энергией изгиба стойки, пропорциональной
квадрату f,
Уменьшение высоты стойки при ее изгибе
(и, соответственно, уменьшение потенциальной
энергии груза) также пропорционально
квадрату f,
поэтому
рельеф описывается квадратичной
параболой. Пока груз невелик, с ростом
прогиба величина П
возрастает
(потенциальная энергия изгиба растет
быстрее, чем убывает потенциальная
энергия груза, рис.8.За), но при большом
весе груза ситуация обратна (рис.8.3 в).
Критическому значению нагрузки G
=
G*
отвечает промежуточная ситуация (рис.8.3
б).