

11. Управление переходом организма из исходного в конечное состояние методом дп: использование ориентированного графа.
(в квадратных скобках не такая супер-важная инфа, что прям важно в них, я подчеркнула)
[Управляемый процесс перевода системы G из начального S0 - в конечное Sm -состояние можно интерпретировать как процесс лечения, который переводит организм человека из состояния «болен» в состояние «здоров», или процесс нормализации состояния человека-оператора, переводящий организм из состояния «не норма» в состояние «норма».
Если при этом реализуется возможность выделения конечного множества состояний организма, являющихся промежуточными между S0 и Sm, и можно описать шаговые управления, переводящие организм из одного состояния в другое, то для оптимизации процесса лечения или нормализации состояния можно применить метод динамического программирования.]
С помощью этого метода может быть заранее рассчитана оптимальная траектория перевода организма из S0 в Sm. В качестве критериев оптимизации, т. е. целевых функций W, могут выступать следующие: время лечения (нормализации состояния, выздоровления, вывода из опасного состояния и т. п.), токсичность применяемых медикаментов – «вредность» лечения, его стоимость, вероятность благоприятного исхода, риск осложнений и др.
[Для реальных задач предпочтительнее использовать одновременно несколько критериев, но это приводит к более сложным процедурам многокритериальной оптимизации.]
Далее в примерах мы будем использовать лишь один аддитивный критерий – время лечения или нормализации состояния.
Сформулируем задачу следующим образом. Имеется два заболевания B1 и B2, каждое из которых состоит из n последовательных стадий болезни: 1-й, 2-й, …, n -й. Стадия n – это «норма», а стадия 1 – наибольшая выраженность заболевания. За один шаг лечения посредством направленных лечебных воздействий можно изменить (увеличить) стадию только одного заболевания на 1. Условия задачи иллюстрирует рис. 2.3, где при n = 5 все возможные состояния пациента задаются узлами построенной прямоугольной сетки.

Рис.3
Для задания значений целевой функции на отрезках прямых, соединяющих узлы сетки, должны быть проставлены числа, равные времени перевода организма из состояния в состояние. Траектория перевода организма из S0 в Sm будет иметь вид ступенчатой линии. Требуется найти такую траекторию, при которой общее время лечения будет минимальным. Решение этой задачи рассмотрим в виде следующего конкретного примера.
(По поводу ориентированного графа, вот его определение из интернета: Ориентированный граф (кратко орграф) — (мульти) граф, рёбрам которого присвоено направление. Направленные рёбра именуются также дугами, а в некоторых источниках и просто рёбрами.
Примеры их чудесной рисовки есть в примерах, лучше если будете рисовать, взять этот, так как он прям подписан как ориент.граф)
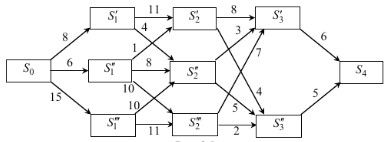
(Будьте осторожны, на картинке есть ошибка где переход от S0 к S’1, там 3 а не 8)
Далее идут два примера:
Пример 2.1. на странице 39 в печатной методе и 40 в электронной
Вот выписка из неё приведенная в конце
В рассмотренной задаче промежуточные состояния организма описывались с помощью прямоугольной сетки. В общем случае это не обязательно. Множество состояний и возможные переходы из состояния в состояние можно задать и в виде ориентированного графа. В этом случае задачи управляемого перевода организма из одного состояния в другое можно представить, как поиск кратчайшего пути на ориентированной ациклической (т. е. без петель и контуров) сети. Решаются такие задачи точно так же, как и на прямоугольной сетке. Заметим, что использованная нами для решения прямоугольная сетка также является ориентированной ациклической сетью, если на ее отрезках проставить стрелки всех возможных управлений. Ниже приведена задача, описываемая в виде сети.
Пример 2.2. на странице 42 в печатной методе и 43 в электронной