

Понятие о частотных характеристиках импульсных сау
Как и САУ непрерывного действия,
импульсные системы описывают не только
z-передаточными
функциями, но и с помощью частотных
характеристик (ЧХ). Последние получают
аналитически или экспериментально. При
математическом моделировании сначала
находят частотную ПФ разомкнутой
системы
![]() .
Для этого в z-передаточной
функции системы W(z)
заменяют оператор z
на оператор j
.
Для этого в z-передаточной
функции системы W(z)
заменяют оператор z
на оператор j![]() согласно равенству
согласно равенству
![]() ,
где
-относительная
частота входного сигнала. Названная
частота
линейно зависит от периода квантования
Т и абсолютной частоты входного
сигнала так, что
,
где
-относительная
частота входного сигнала. Названная
частота
линейно зависит от периода квантования
Т и абсолютной частоты входного
сигнала так, что
![]() .
Основную частотную ПФ импульсной САУ
.
Основную частотную ПФ импульсной САУ
![]() получают аналогично. Модуль комплексной
функции
представляет
собой АЧХ, а аргумент – ФЧХ замкнутой
САУ. На рис.1.14 в качестве примера изображен
годограф разомкнутой импульсной САР,
НЧ которой имеет ПФ W(s)=K/(Ts+1).
получают аналогично. Модуль комплексной
функции
представляет
собой АЧХ, а аргумент – ФЧХ замкнутой
САУ. На рис.1.14 в качестве примера изображен
годограф разомкнутой импульсной САР,
НЧ которой имеет ПФ W(s)=K/(Ts+1).
Особенностью ЧХ импульсных САУ
является то, что они представляют собой
периодические функции частоты
(рис.1.15). Поэтому для описания САУ
достаточно построить ЧХ в диапазоне![]() ,
что соответствует абсолютным
,
что соответствует абсолютным
з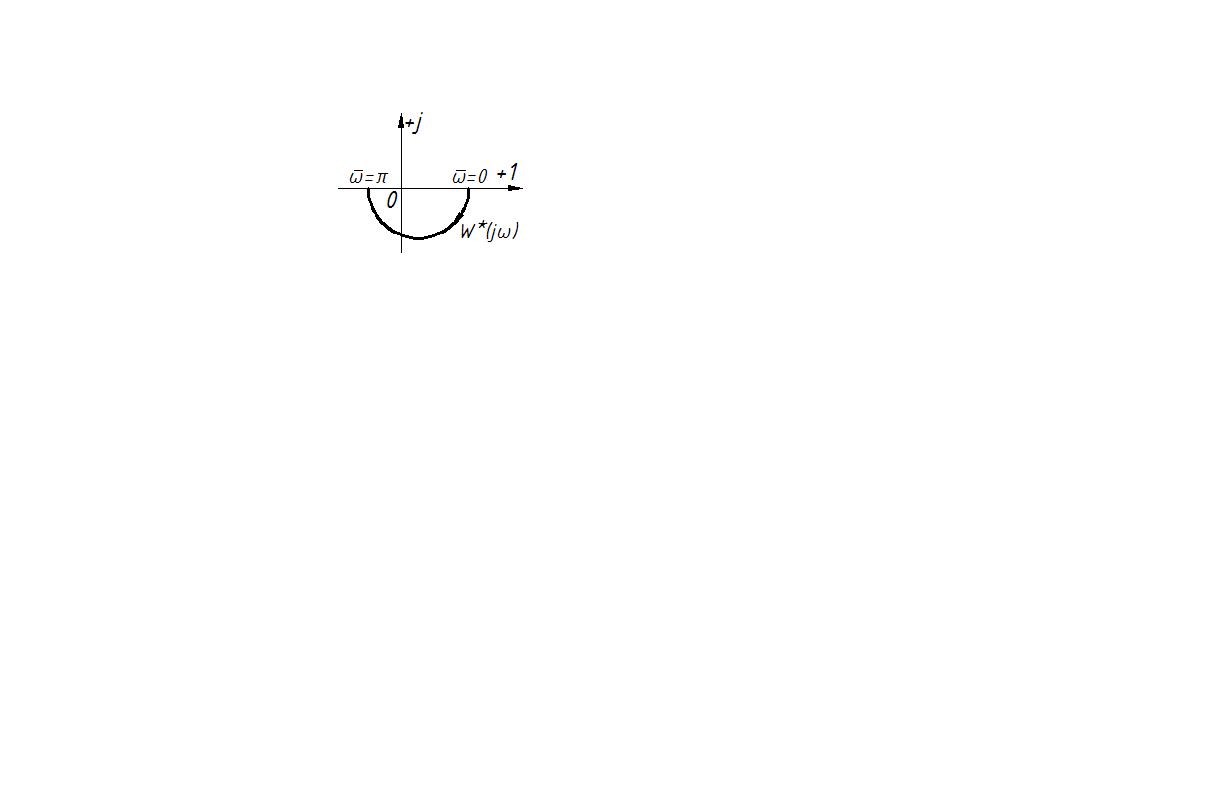 начениям
частоты
начениям
частоты
![]()
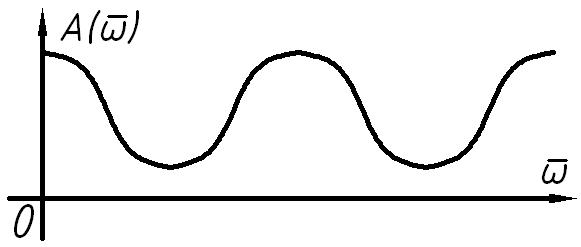 Рисунок 1.15
Рисунок 1.15
Рисунок 1.16
1.3.2.9 Теорема Котельникова-Шеннона
Оценка эквивалентности импульсной САУ с АИМ системе непрерывного действия является одной из важнейших задач теории дискретных САУ. Условия такой эквивалентности сводят к двум неравенствам
![]() (1.9)
(1.9)
где
![]() -наибольшая частота внешнего воздействия,
приведённого ко входу ИЭ. При выполнении
названных условий (1.9) наличием квантования
по времени в САУ можно пренебречь и
рассматривать импульсную САУ как САУ
непрерывного действия. Условия (1.9)
следуют из теоремы Котельникова-Шеннона
об условии неискажённой передачи
непрерывного сигнала конечным числом
его дискретных значений, которая
применена к САУ с АИМ.
-наибольшая частота внешнего воздействия,
приведённого ко входу ИЭ. При выполнении
названных условий (1.9) наличием квантования
по времени в САУ можно пренебречь и
рассматривать импульсную САУ как САУ
непрерывного действия. Условия (1.9)
следуют из теоремы Котельникова-Шеннона
об условии неискажённой передачи
непрерывного сигнала конечным числом
его дискретных значений, которая
применена к САУ с АИМ.
1.3.3 Анализ устойчивости импульсных сау с аим
1.3.3.1 Общие сведения
Как и в теории непрерывных систем, для косвенного определения устойчивости импульсной системы достаточно исследовать характеристическое уравнение замкнутой САУ
![]() ,
(1.10)
,
(1.10)
где
![]() .
.
 Корни этого уравнения z1,z2,
…, zm
могут быть как комплексно- сопряженными,
так и вещественными или чисто мнимыми.
Поскольку
Корни этого уравнения z1,z2,
…, zm
могут быть как комплексно- сопряженными,
так и вещественными или чисто мнимыми.
Поскольку
![]() или
или
![]() ,
то каждый корень zi
(i=1,2…m,
где m – порядок
характеристического уравнения) может
быть изображен точкой на комплексной
плоскости, которую называют в
рассматриваемых случаях z-
плоскостью (рис.1.17) или q-
плоскостью (рис.1.18).Нетрудно заметить,
что нулевому корню (напр., s1=0)
соответствует корень z1=1,
а отрицательным вещественным корням
si
соответствуют корни
,
то каждый корень zi
(i=1,2…m,
где m – порядок
характеристического уравнения) может
быть изображен точкой на комплексной
плоскости, которую называют в
рассматриваемых случаях z-
плоскостью (рис.1.17) или q-
плоскостью (рис.1.18).Нетрудно заметить,
что нулевому корню (напр., s1=0)
соответствует корень z1=1,
а отрицательным вещественным корням
si
соответствуют корни
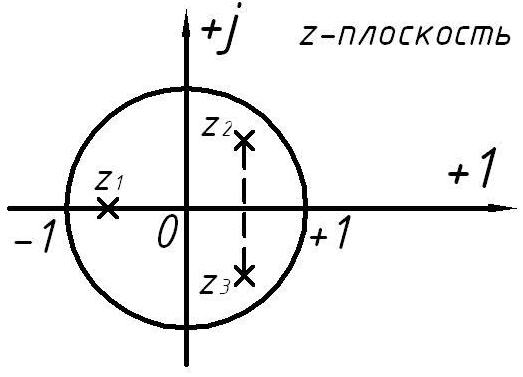
![]() Т.о., импульсная САУ устойчива, если все
корни характеристического уравнения
лежат внутри окружности единичного
радиуса с центром в начале координат
z- плоскости
(рис.1.17.). Напротив, система неустойчива,
если хотя бы один корень
Т.о., импульсная САУ устойчива, если все
корни характеристического уравнения
лежат внутри окружности единичного
радиуса с центром в начале координат
z- плоскости
(рис.1.17.). Напротив, система неустойчива,
если хотя бы один корень
![]()
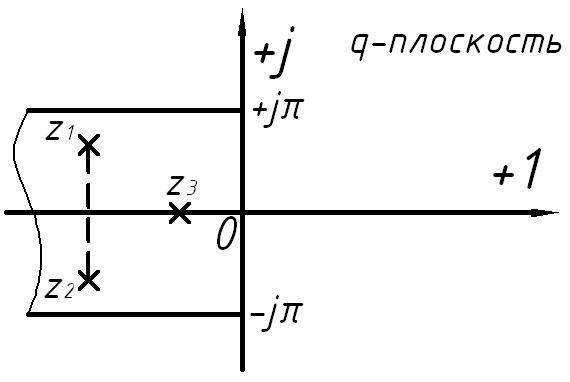 Рисунок 1.17 Для суждения
об устойчивости САУ нет необходимости
определять сами корни, достаточно лишь
установить, лежат ли все они в левой
части полосы
Рисунок 1.17 Для суждения
об устойчивости САУ нет необходимости
определять сами корни, достаточно лишь
установить, лежат ли все они в левой
части полосы
![]() (рис.1.18) или внутри единичной окружности
(рис.1.18) или внутри единичной окружности
![]() (рис.1.17). Признаки указанного расположения
корней называют критериями устойчивости
САУ и условно разделяют на алгебраические
и частотные.
(рис.1.17). Признаки указанного расположения
корней называют критериями устойчивости
САУ и условно разделяют на алгебраические
и частотные.
Рисунок 1.18