

3.2 Прохождение случайных сигналов через линейные звенья и системы.
Для решения названной задачи структурную схему САУ представляют в виде, показанном на рис 3.3. , где g(t) – управляющее воздействие, n(t) – возмущающее воздействие (сигнал помехи) , y(t) –выходное воздействие САУ.
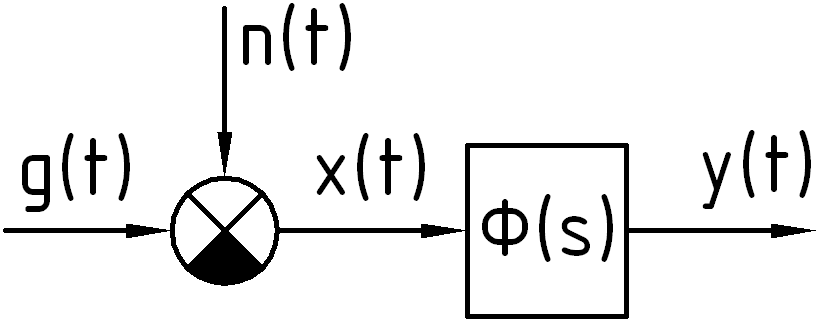
Рисунок 3.3
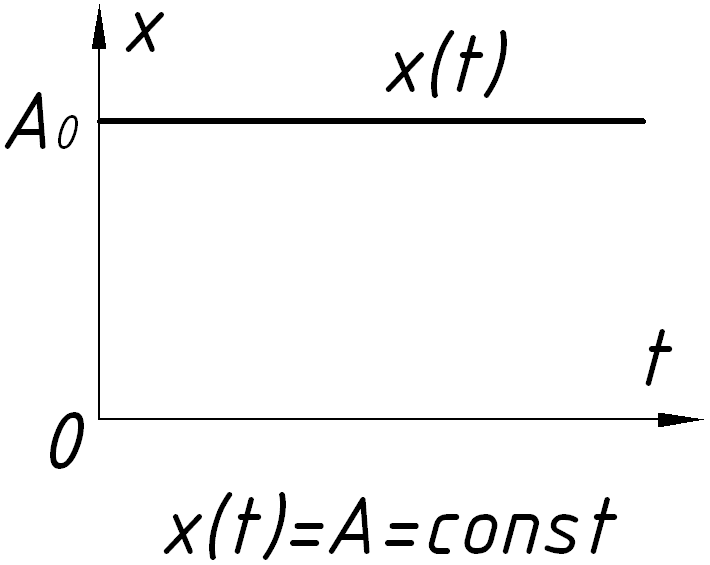
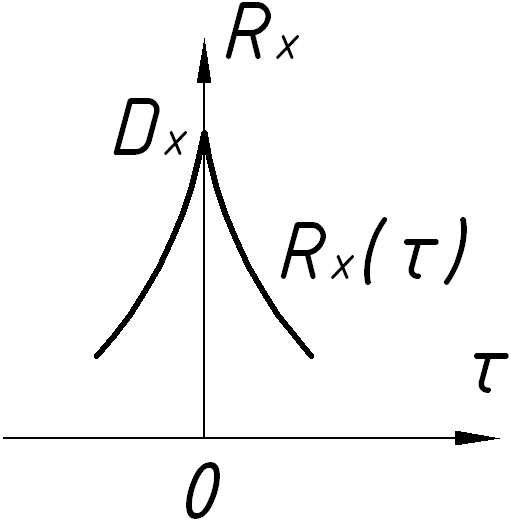
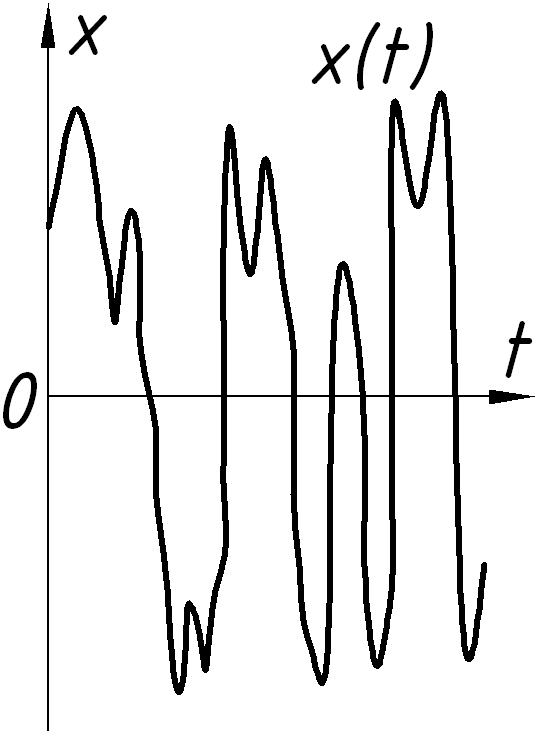
Кроме того, случайный стационарный
сигнал x(t)
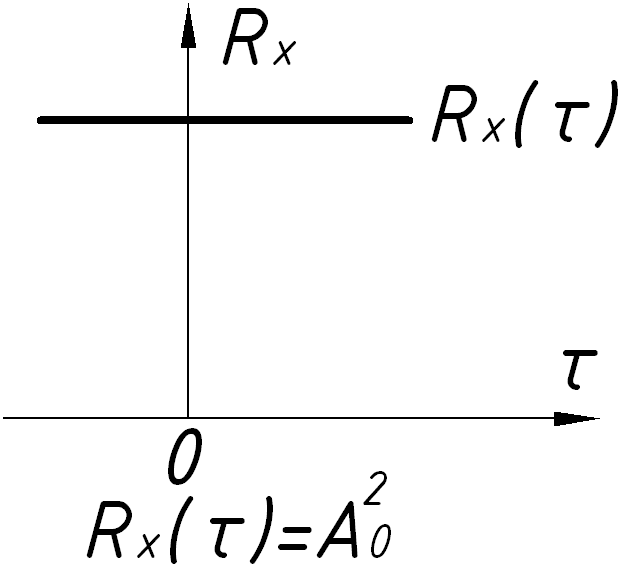
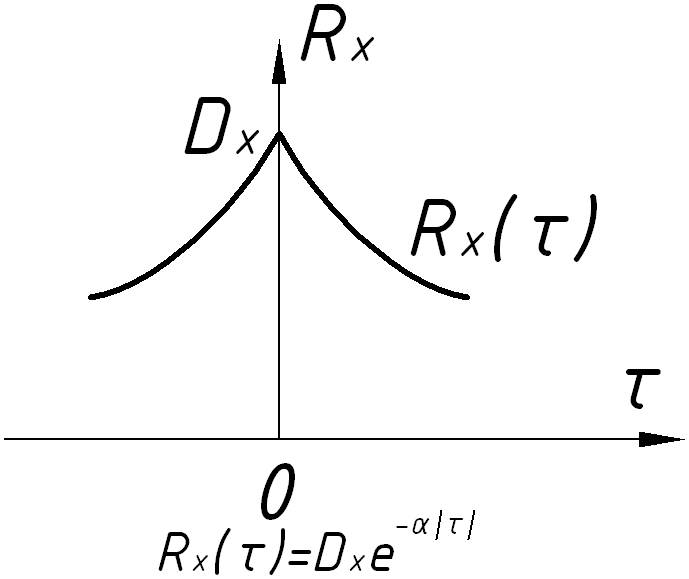
характеризуется корреляционной
функцией
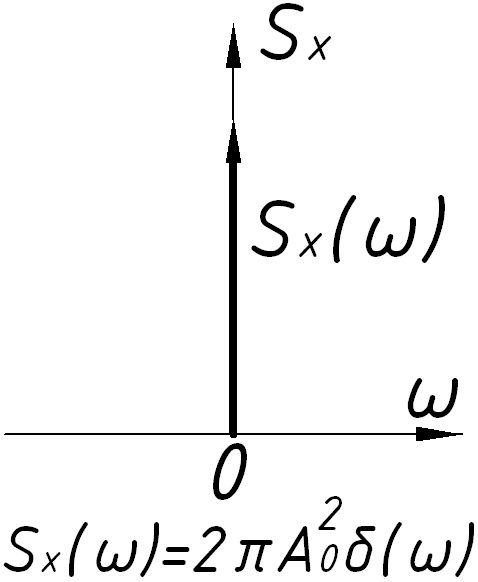
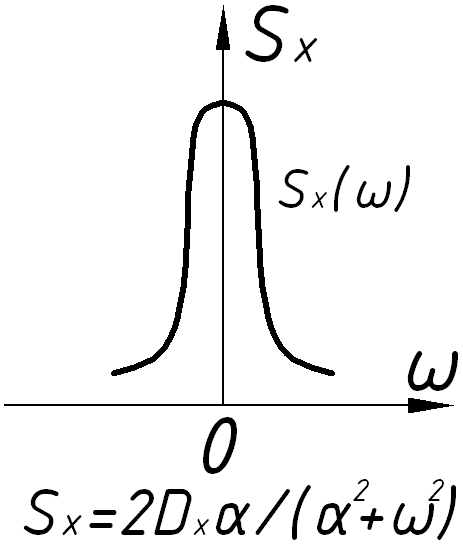
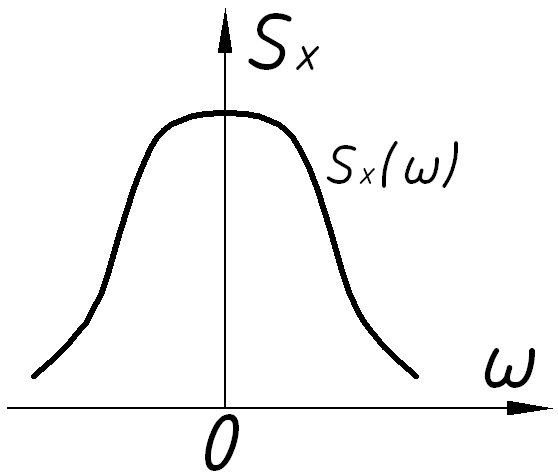
![]() и спектральной плотностью
и спектральной плотностью
![]() .
Искомыми являются корреляционная
функция
.
Искомыми являются корреляционная
функция![]() и спектральная плоскость
и спектральная плоскость![]() выходной величины y(t).
КФ выходной величины связана с КФ входной
величины интегральным соотношением
выходной величины y(t).
КФ выходной величины связана с КФ входной
величины интегральным соотношением
![]() ,
(3.3)
,
(3.3)
где
,![]() и
и
![]() - независимые переменные интегрирования;
- независимые переменные интегрирования;
![]() -импульсная (весовая) функция САУ.
Подстановка (3.3) в (3.2) приводит к следующей
функции
-импульсная (весовая) функция САУ.
Подстановка (3.3) в (3.2) приводит к следующей
функции
![]() .
(5.4)
.
(5.4)
3.3 Анализ и синтез линейных стохастических систем при стационарных случайных воздействиях.
Задачами статистического анализа САУ являются:
1) оценка среднеквадратической ошибки (СКО) управления при заданных структуре, параметрах САУ и известных статистических характеристиках управляющих воздействий и помех;
2)связь СКО с основными параметрами САУ.
Статистический синтез имеет целью построение в статистическом смысле оптимальной САУ. Различают два вида названных задач:
1)синтез САУ при заданной структуре путем параметрического синтеза, т.е. задача состоит в отыскании экстремума функции одной или нескольких переменных. В результате чего находят такие значения параметров, при которых выбранный критерий качества САУ, выраженный через ее параметры, имеет максимальное значение;
2)синтез САУ при произвольной структуре, когда по статистическим характеристикам задающих и возмущающих воздействий определяют структуру и параметры системы, обеспечивающие минимум СКО.
Таблица 3.1
|
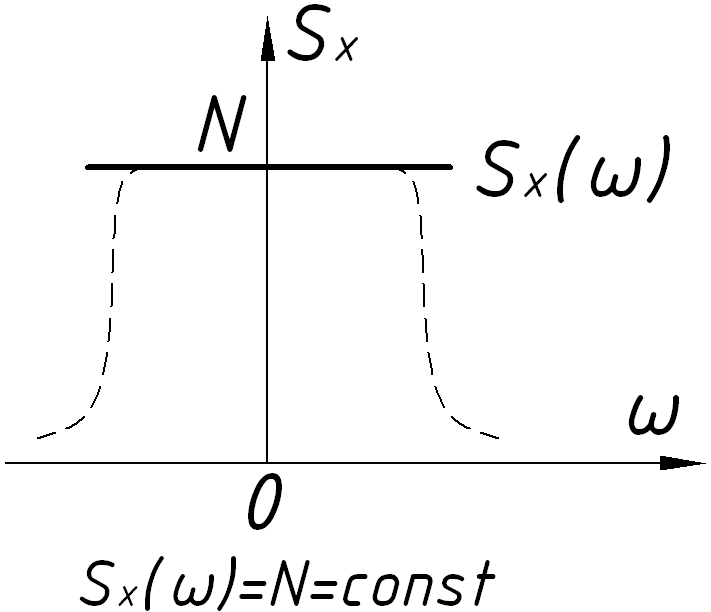
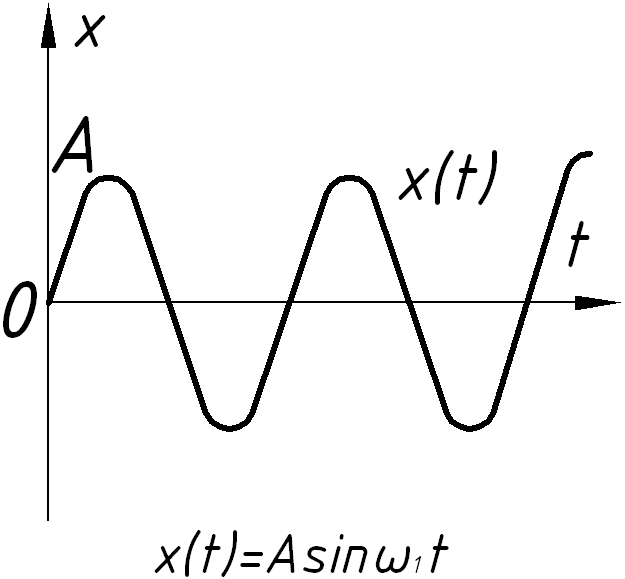
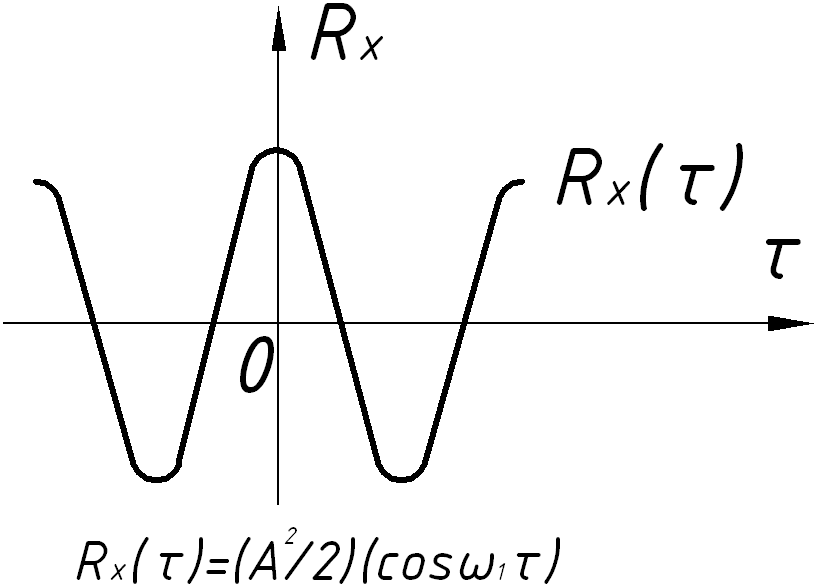
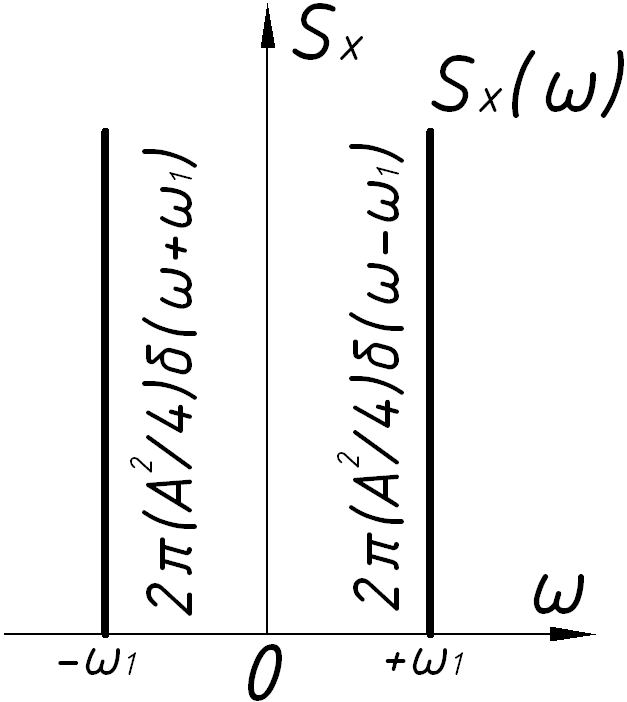
Сигнал x(t) |
Корреляционная функция Rx(t) |
Спектральная плотность Sx(t) |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
4 Оптимальные сау
4.1 Задачи оптимального управления
Одной из задач синтеза оптимальных
САР является параметрическая оптимизация
САУ с заданной структурой. Более общая
задача-синтез оптимальной системы при
нефиксированной структуре. В общем
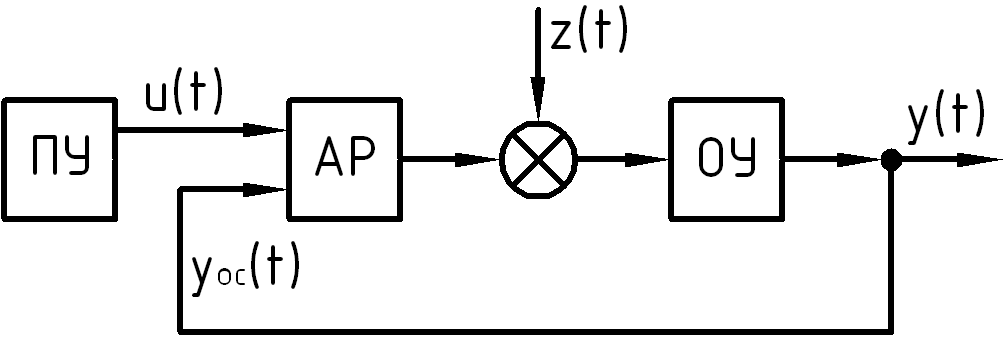
случае САУ состоит из ОУ, АР и ЗУ (
программного устройства ПУ), вырабатывающего
задающее воздействие
![]() (t)
или программу (рис.4.1).
(t)
или программу (рис.4.1).
 Задачи синтеза оптимальной САУ
состоит в том, чтобы для заданного ОУ
синтезировать АР и ПУ, которые в
определенном смысле наилучшим образом
решают поставленную задачу управления.
В соответствие с этим рассматривают
две родственные задачи: синтез
оптимального ПУ и синтез оптимального
АР. Математически эти задачи могут быть
сформулированы единообразно и решаться
одними и теме же методами, но в тоже
время эти задачи имеют особенности,
которые делают целесообразным их
раздельное рассмотрение. Особенности
первой задачи обусловлены определением
программного управления, второй –
определением управления с обратной
связью.
Задачи синтеза оптимальной САУ
состоит в том, чтобы для заданного ОУ
синтезировать АР и ПУ, которые в
определенном смысле наилучшим образом
решают поставленную задачу управления.
В соответствие с этим рассматривают
две родственные задачи: синтез
оптимального ПУ и синтез оптимального
АР. Математически эти задачи могут быть
сформулированы единообразно и решаться
одними и теме же методами, но в тоже
время эти задачи имеют особенности,
которые делают целесообразным их
раздельное рассмотрение. Особенности
первой задачи обусловлены определением
программного управления, второй –
определением управления с обратной
связью.
Рисунок 4.1
Системы с оптимальным ПУ называют оптимальными по режиму управления, а САУ с оптимальным АР – оптимальными по переходному режиму. САУ называют оптимальной, если оптимальными являются ПУ и АР.
Задача синтеза оптимальных САУ относится к классу задач оптимального управления и формулируется как вариационная задача. При этом кроме уравнения ОУ должны быть заданы ограничения на управление (t) и фазовый вектор y(t), краевые условия и выбран критерий оптимальности.