

8. Принцип Германа-Эйлера-д'Аламбера.
Принципом или началом в механике называют положение определяющее общий подход (принцип) к решению широкого круга задач. Принцип Даламбера позволяет уравнения динамики представить в форме уравнений статики и свести решение задач динамики к решению задач о равновесии систем сил. Этот подход часто упрощает решение и, поэтому, широко используется.
Принцип Германа-Эйлера-Д'Аламбера для материальной точки.
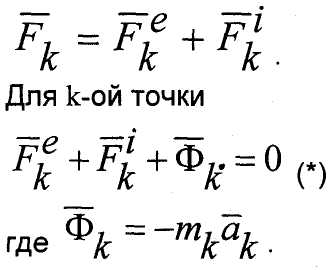
Рассмотрим движение материальной точки Ak массой mk в инерциаль-ной системе отсчёта, под действием системы сил, равнодействующая
которыхFk Основное уравнение динамики будет



![]()
В любой момент времени сумма сил, действующих на точку, и силы инерции этой точки, равны нулю.
Можно записать в проекциях на оси


Эти уравнения представляют собой основное уравнение динамики в форме уравнений статики равновесия сходящихся систем сил. Составление уравнений сводится к составлению уравнений равновесия статики.
Принцип Германа-Эйлера-Д'Аламбера для механической системы.
Механическая система состоит из «n» материальных точек
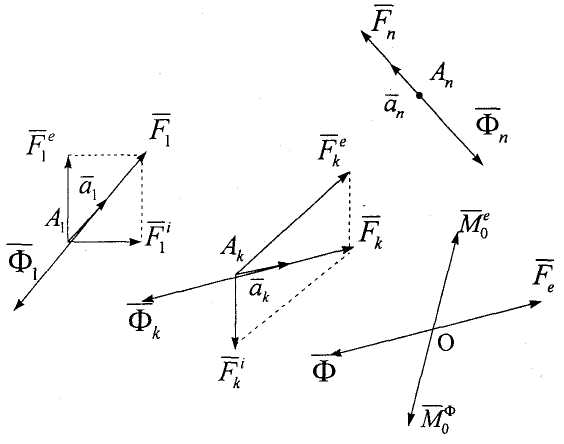
Приведём
«n»
уравновешенных систем сил
![]() к
центру О,
к
центру О,
используя теорему (метод) Пуансо.
Согласно основной теореме статики любая система сил эквивалентна одной силе и паре сил. Причём приведённая сила-главный вектор системы, а момент приведённой пары главный момент системы относительно выбранного центра. Если система уравновешенная, то главный вектор и главный момент равны нулю.
В нашем случае система 3n сил является уравновешенной, т.к. каждая n-ая система трёх сил по уравнению (*) уравновешенна. Следовательно приведённая сила (главный вектор) и момент приведённой пары (главный момент) равны нулю.
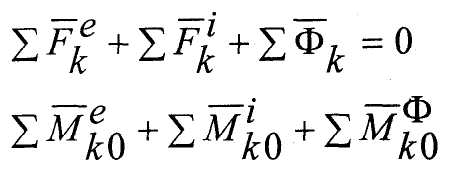

В любой момент времени сумма главного вектора внешних сил системы и главного вектора сил инерции, а также сумма главного момента внешних сил и главного момента сил инерции системы относительно произвольного центра, равны нулю.
Уравнения (**) по форме аналогичны условиям равновесия произвольной пространственной системы сил статики.
Первое уравнение-иная форма основного уравнения динамики поступательного движения системы или уравнения теоремы об изменении количества движения механической системы. Второе уравнение-иная форма теоремы об изменении главного момента крличества движения механической системы.
Если начало системы осей прямоугольно декартовой координат поместить в центр О, можно записать (**) в проекции.

Главный вектор и главный момент сил инерции твёрдого тела.
Главный вектор сил инерции
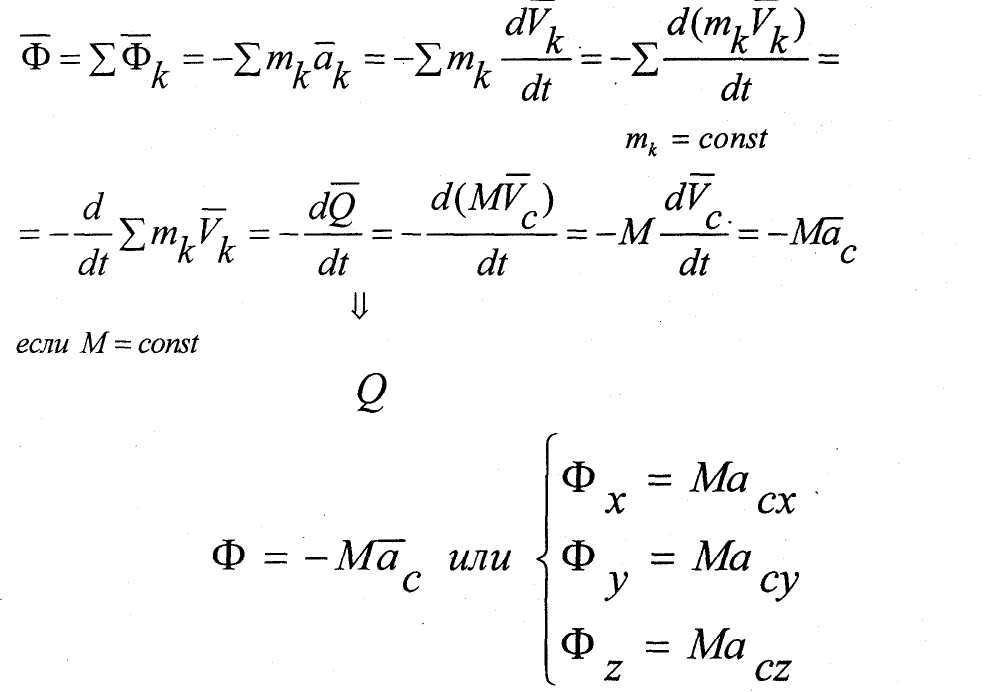
В качестве центра приведённого в динамике принимается
центр масс системы. Главный момент сил инерции относительно центр
масс определим для разных видов движения твёрдого тела.
а) Поступательное движение твердого тела.
Ускорения
всех точек одинаковы
![]()

Итак
![]() — и
при поступательном движении твёрдого
тела.
— и
при поступательном движении твёрдого
тела.
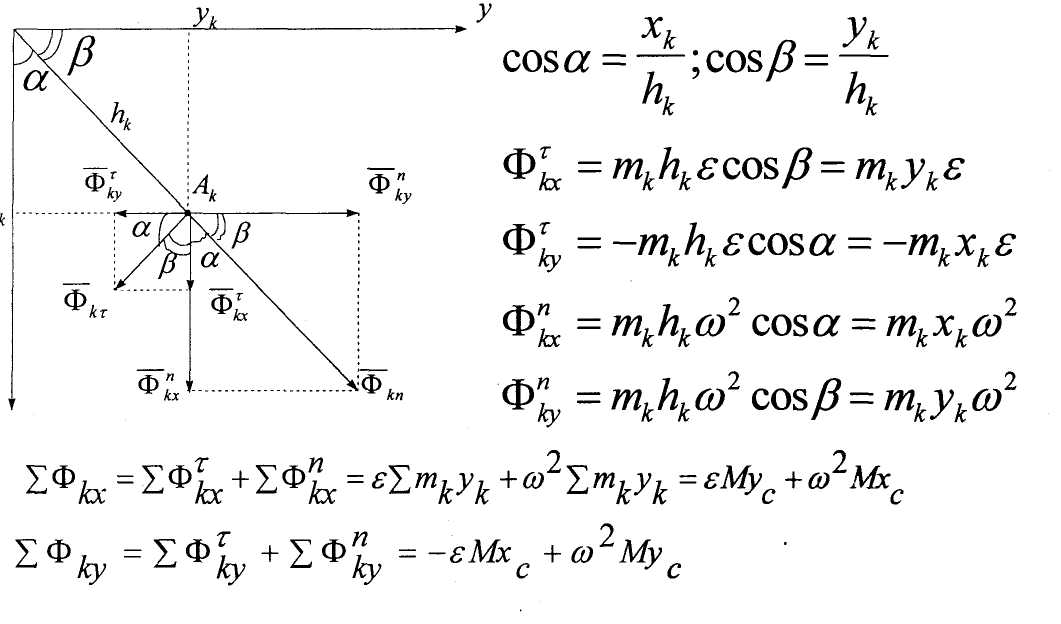
б) Вращательное движение твёрдого тела вокруг неподвижной оси проходящей через центр масс. Тело имеет плоскость симметрии , перпендикулярно оси вращения.
Определять
главный момент сил инерции![]() будем
по его проекциям,
будем
по его проекциям,
Рассмотрим
произвольную точку Ак
массой
m
отстоящей от оси Z
на hк
.
Её сила инерции .
Т.к. у тела есть плоскость сим-
.
Т.к. у тела есть плоскость сим-
метрии П, то есть точка Ak’ симметрична Ак такой же массы
mк’
=mк’
и
расположена она на таком же расстоянии от
оси Z.
от
оси Z.
Следовательно, т.к.

и моменты этих сил относительно осей X и Y равны по модулю и противоположны по знаку.
Отсюда следует, что главный момент сил инерции относительно центра
масс С направлен по оси Z, а его модуль равен Mz .
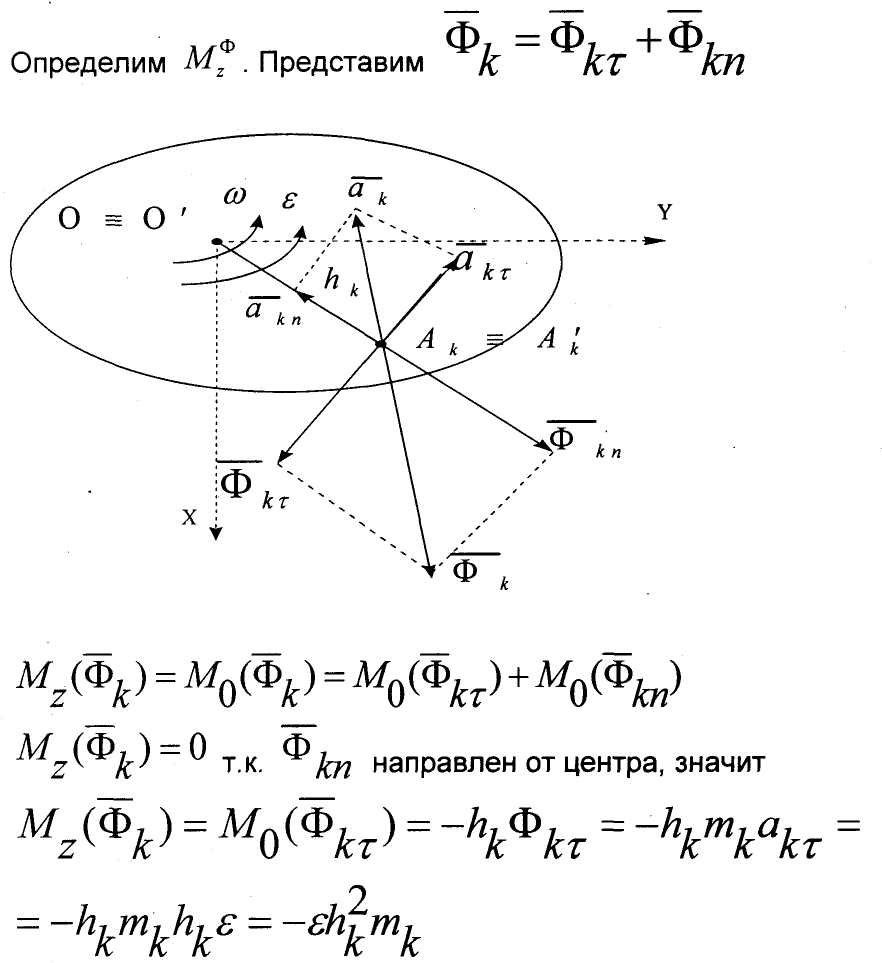
Просуммируем по элементам (точкам)

Вывод:![]() ,
направлен по оси вращения Z,
т.е.
,
направлен по оси вращения Z,
т.е.
его вращательное действие вокруг оси Z противоположно
направлению![]()
в) Плоское движение твёрдого тела, имеющего плоскость симметрии, параллельную плоскости движения.
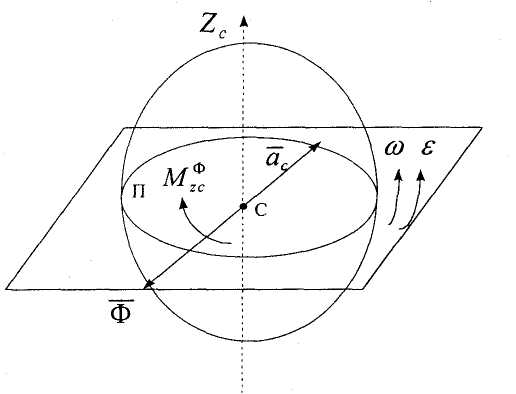
Плоское движение представим как сложное, состоящее из поступательного движения вместе с центром
7
масс и вращения вокруг оси ^с , проходящей через центр масс перпендикулярно плоскости движения.
Главный вектор сил инерции обусловлен поступательной составляющей
плоского
движения и равен![]()
Вращательная составляющая движения «вызывает» силы инерции, приводящиеся к паре сил, момент который равен главному моменту сил
Применим принцип Германа-Эйлера-Д'Аламбера к определению реакций подшипников.(Часто встречающаяся на практике задача «Детали машин», «Процессы и аппараты»,«ПТУ» и т.д.).
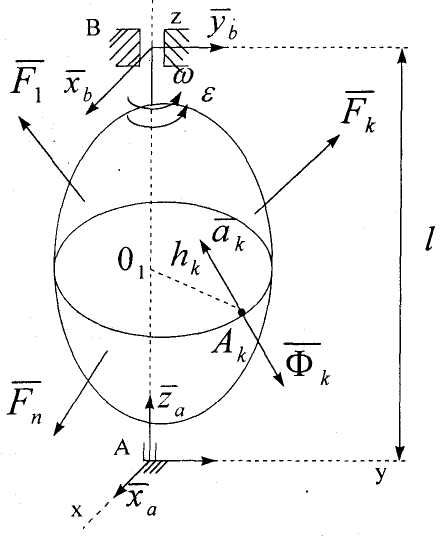
Пусть тело вращается под действием системы внешних сил
![]() Действие
связей покажем составляющими опорных
реакций
Действие
связей покажем составляющими опорных
реакций
![]() .
В каждой материальной точке
.
В каждой материальной точке
![]() приложим
силу
приложим
силу
инерции
![]() тогда
можно запи-
тогда
можно запи-
сать для произвольной пространственной системы сил
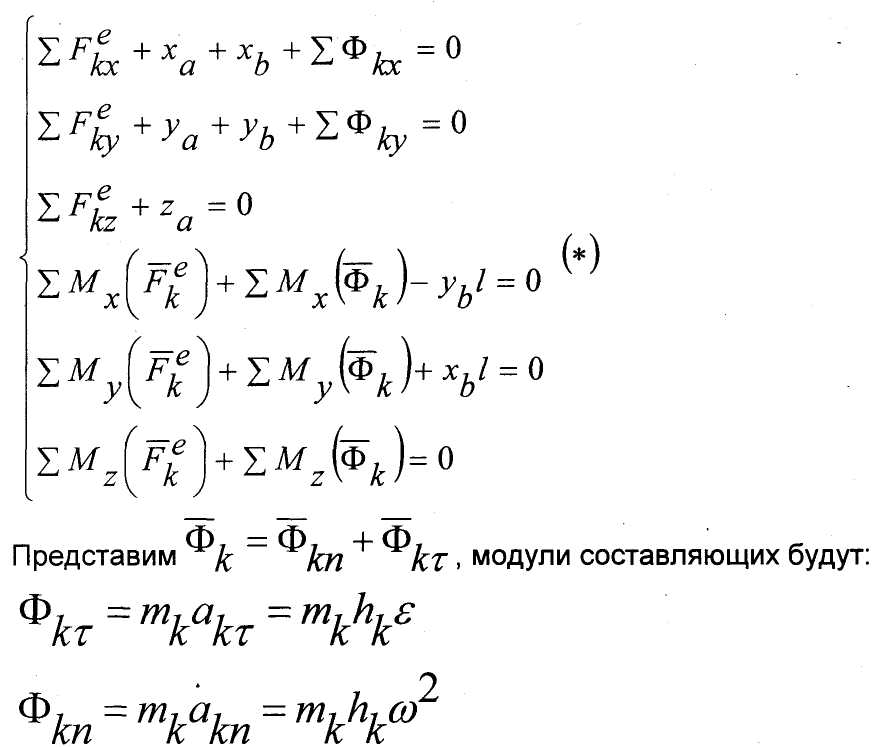
Найдём проекции сил инерции на координатные оси и их моменты относительно осей
центробежные
моменты инерции вращающегося тела.
Определение условия отсутствия динамических составляющих реакций подшипников. Математически это условие выражается системой четырёх уравнений

Эти условия означают, что при вращении динамические составляющие будут отсутствовать если:
ось вращения проходит через центр масс тела (ось центральная)
центробежные моменты инерции тела содержащие соответствующую оси вращения координату (Z) были равны нулю, (ось главная)
Вывод: если тело вращается около центральной главной оси, то динамические составляющие реакций отсутствуют.
Динамические составляющие могут значительно (в несколько раз) превышать значения статических реакций, поэтому вопросы динамической балансировки занимают очень важное значение в технике.
Принципы возможных перемещений и общее уравнение