

Задание на контрольную работу.
Контрольная работа посвящена математическому описанию линейных систем математического управления и преобразованию структурных схем этой системы. Структурные схемы приведены в п.3. К каждой из этих схем приведены дифференциальные уравнения её элементов.
Контрольная работа включает следующие задания:
Записать передаточные функции всех элементов САУ по заданным дифференциальным уравнениям и указать наименование каждого звена.
Рассчитать передаточную функцию разомкнутой САУ и записать дифференциальное уравнение для разомкнутой САУ.
Рассчитать передаточную функцию замкнутой САУ относительно выходной величины (х) по входному воздействию (u). Выделить собственный оператор системы и оператор воздействия.
Записать дифференциальное уравнение для замкнутой САУ и её характеристическое уравнение.
Определить нули и полюса передаточной функции замкнутой системы.
Варианты контрольной работы.
Вариант 1.

1).
![]() 3).
3).
![]()
2).
![]()
![]() 4).
4).
![]()
5).
![]()
Вариант 2.

1).
![]() 3).
3).
![]()
2).
![]() 4).
4).
![]()
Вариант 3.

1).
![]() ; 2).
; 2).
![]() ;
;
3).
![]() ;
4).
;
4).
![]() .
.
Вариант 4.

1).
![]() 4).
4).
![]()
2).
5).
![]()
3).
![]()
Вариант 5.

1).
3).
![]()
2).
![]() 4).
4).
![]()
Вариант 6.

1).
![]() 3).
3).
![]()
2).
![]() 4).
4).
![]()
Вариант 7.

1).
![]() 3).
3).
![]()
2).
![]() 4).
4).
![]()
Вариант 8.

1).
![]() 3).
3).
![]()
2).
![]() 4).
4).
Вариант 9.

1).![]() 3).
3).
![]()
2).
![]() 4).
4).
![]()
Вариант 10

1).
![]() 3).
3).
![]()
2).
![]() 4).
4).![]()
7. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ
ВЫПОЛНЕНИЯ КУРСОВОЙ РАБОТЫ
«Исследование устойчивости и качества системы
автоматического управления движением относительно центра
масс летательного аппарата в канале крена»
1. Введение.
Курсовая работа по теории автоматического управления «Исследование устойчивости и качества системы автоматического управления движением относительно центра масс летательного аппарата в канале крена» посвящена задачам устойчивости и качества линейных систем автоматического управления (САУ), решению которых предшествует обсуждение принципиальных вопросов построения и процесса синтеза САУ, формирования и линеаризации математической модели системы.
Выбранная для анализа и синтеза система управления движением относительно продольной оси летательного аппарата при всей своей простоте позволяет применить изучаемые в теоретическом курсе методы на практике, в том числе: синтез структурной схемы системы, построение математической модели системы управления, исследование устойчивости методами Рауса-Гурвица, Михайлова и Найквиста и анализ качества управления.
2. Система управления движением летательного аппарата
относительно центра масс.
2.1. Принципы управления угловым движением
летательного аппарата.
Управление движением летательного аппарата (ЛА), полет которого происходит в атмосфере Земли, осуществляется с помощью аэродинамических органов управления, к которым относятся руль высоты, руль направления и элероны. Создавая моменты относительно центра масс, эти органы управления изменяют угловое положение ЛА, что позволяет управлять действующими на ЛА силами и формировать желаемую траекторию.
На рис. 2.1. и 2.2. показаны органы управления для различных типов самолетов, на рис. 2.3. правила знаков для отклонения руля высоты (в), руля направления (н) и элеронов (э).
Управление движением ЛА относительно центра масс обеспечивает установку и поддержание заданных значений угловых координат. Этот процесс часто называют угловой стабилизацией, а систему управления движением относительно центра масс – системой угловой стабилизации ЛА. Эта система содержит три канала, каждый из которых предназначен для стабилизации объекта управления относительно осей прямоугольной декартовой системы координат, связанной с летательным аппаратом.
Угловое движение ЛА относительно продольной оси определяется углом крена (рис. 2.4.), управление этим угловым движением осуществляет канал крена системы управления, а органом управления в этом канале являются элероны. Поскольку момент крена, как и всякий момент, пропорционален расстоянию от точки приложения силы до оси вращения, элероны на самолетах располагаются на концах крыльев (рис. 2.1. – 2.4.). Это дает возможность при одинаковой аэродинамической силе, возникающей на элеронах, получить больший момент управления.
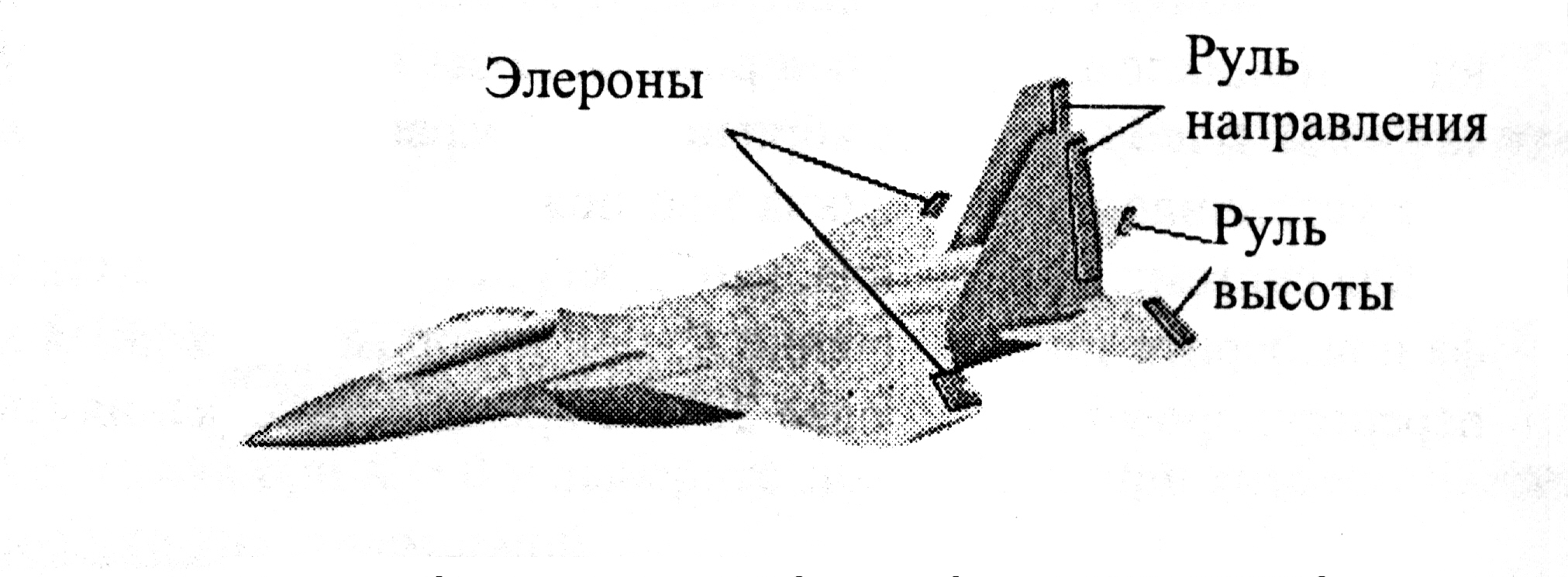
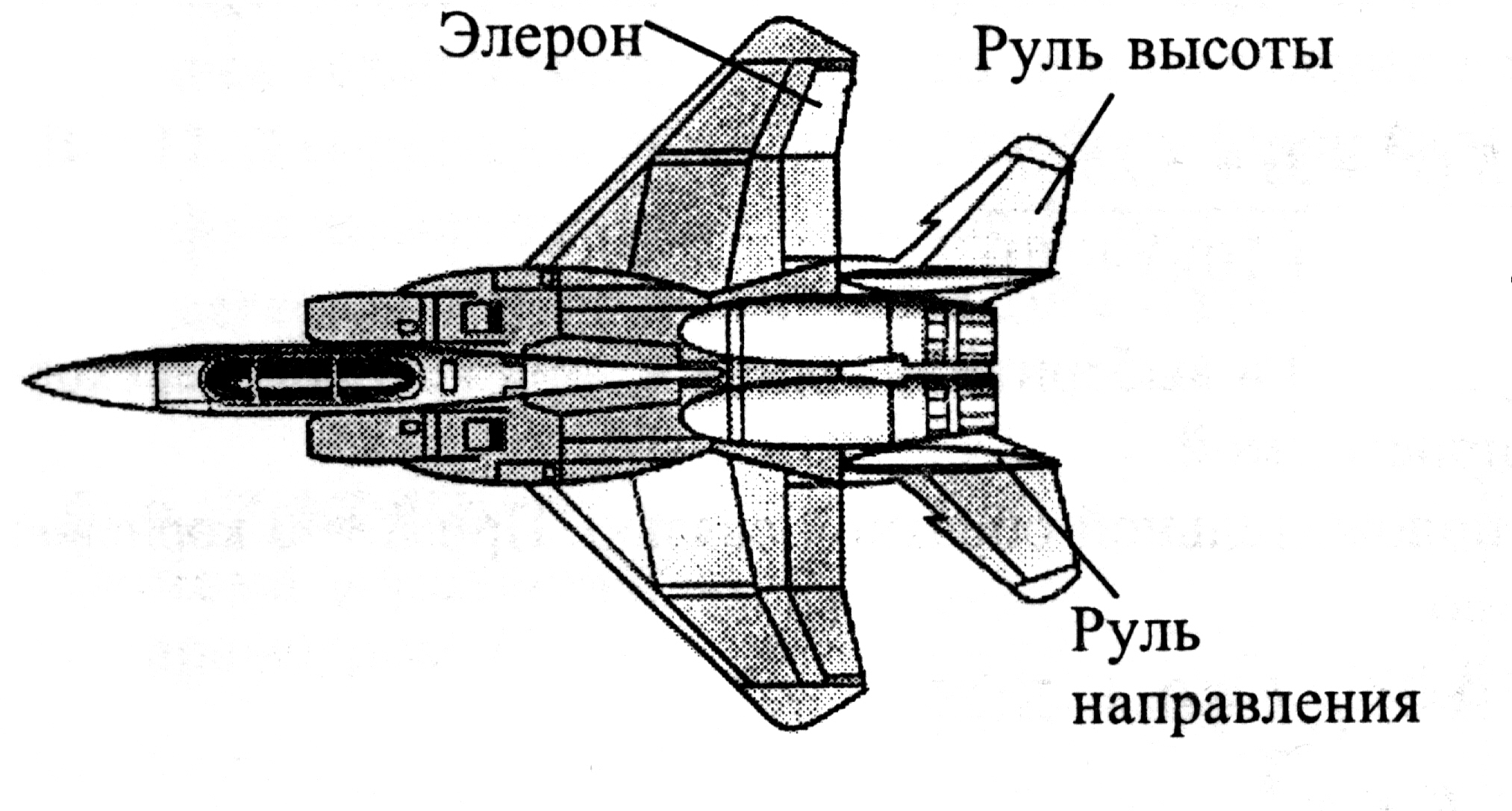
Рис.2.1. Многоцелевой
реактивный истребитель. Органы
управления
э
э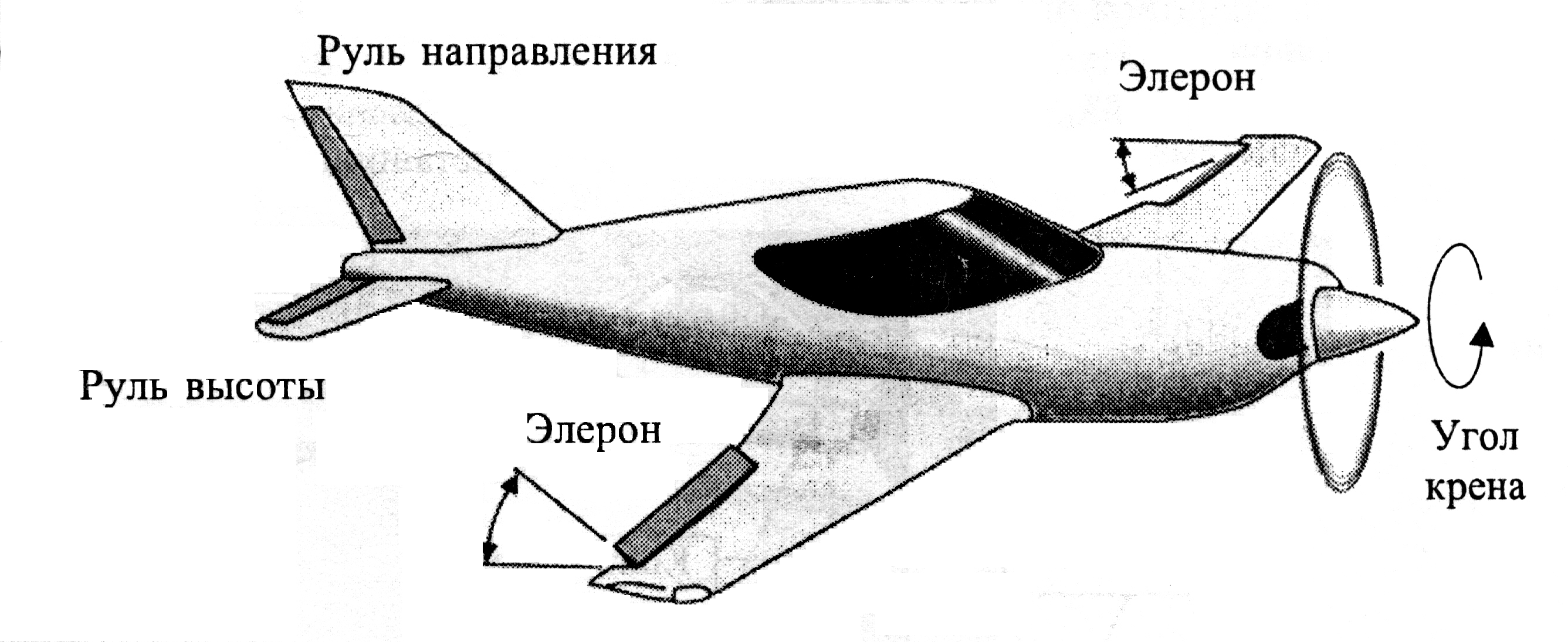
Рис. 2.2. Легкий
пассажирский самолет. Органы управления
Рис. 2.3. Углы
отклонения органов управления
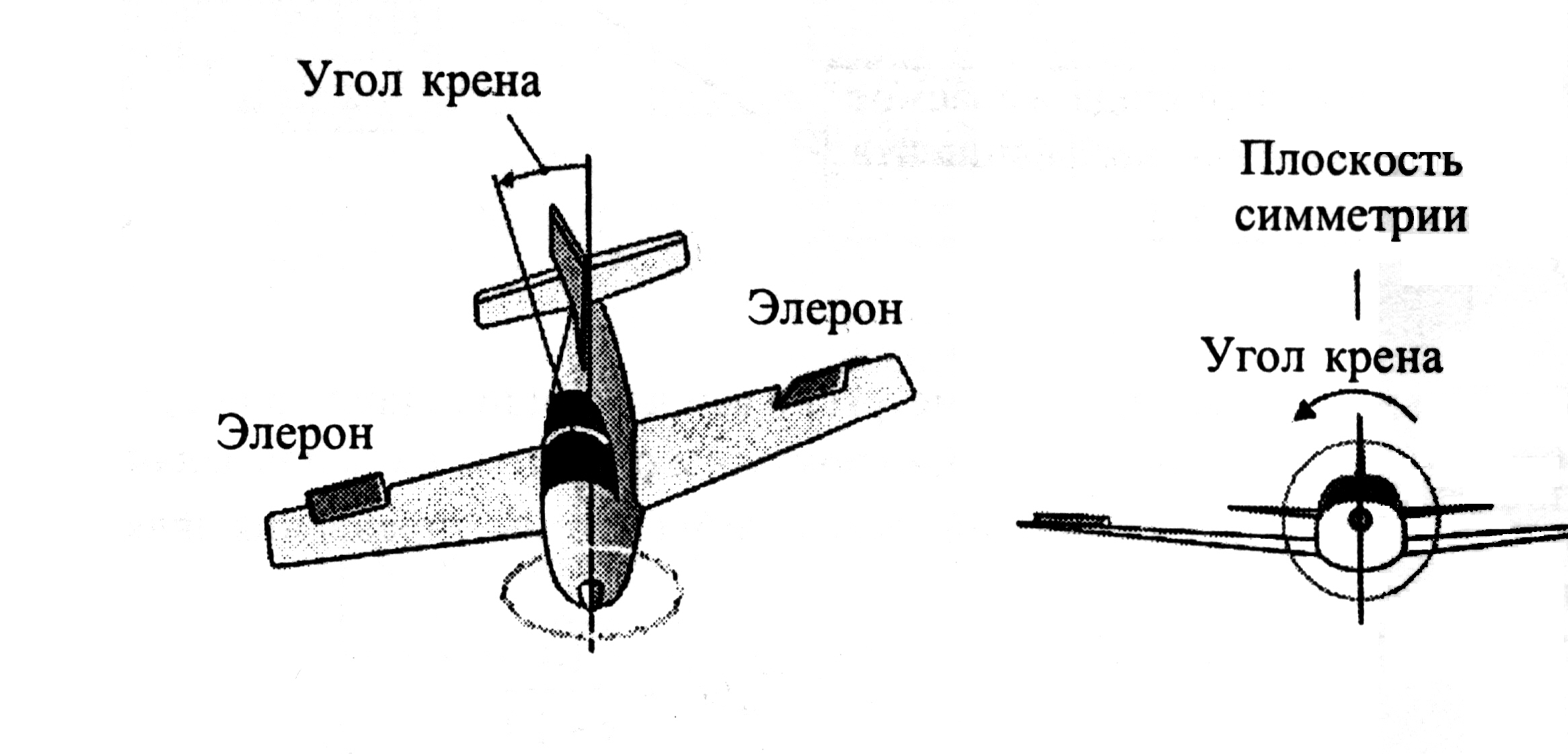

Рис. 2.4. Управление
углом крена самолета с помощью элеронов.
Органы управления
(руль высоты,
направления, элероны)
Рис. 2.5. Принципиальная схема управления движением относительно
центра масс (угловой стабилизации) летательного аппарата.
Принципиальная схема управления движением летательного аппарата (самолета) относительно центра масс приведена на рис. 2.5. и содержит все необходимые элементы системы управления: объект управления, измерительные, задающие и сравнивающие устройства, устройство формирования закона управления, исполнительный механизм и органы управления.