

Лабораторная работа №13 синтез компенсаторов перекрестных связей системы
Цель работы: изучение методов синтеза устройств, компенсирующих перекрестные связи многомерных систем управления, и исследование динамических характеристик многомерных систем управления.
Порядок выполнения работы
Многосвязная система регулирования изображена на рис 68, а, б. Качество регулирования такой системы во многом определяется не только выбором структуры регулятора и параметрами его настройки, но и введением корректирующих звеньев.
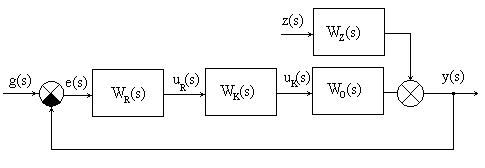
а

б
Рис. 68. Структурные схемы многомерной системы управления с
корректирующими устройствами
Для двумерных систем передаточные функции объекта и пропорционального регулятора в матричном виде могут быть записаны как:
 ,
,  ,
,
передаточная функция объекта по возмущению:
 ;
;
![]() – векторы размерности
21.
– векторы размерности
21.
Так как передаточные функции объекта заданны недиагональными матрицами, то в системе управления присутствуют перекрестные связи. Например, связи между входами и выходами для объекта управления с двумя входами и выходами изображены на рис. 69.
|

Рис. 69. Структурная схема многомерного объекта управления
Требуется:
синтезировать корректирующее звено WK(s), устраняющее перекрестные связи в замкнутой системе;
определить коэффициенты регулятора WR(s), обеспечивающие отработку системой задания g(s);
построить динамические характеристики системы без перекрестных связей при нулевых начальных условиях и единичных ступенчатых входных воздействиях:
аналитическим способом;
одним из численных методов, реализованным в виде процедуры Mathcad.
Теоретические сведения
Выведем формульное выражение передаточной функции замкнутой системы (рис. 68, а). Выход объекта:
![]() , (77)
, (77)
где
![]() – выход объекта, g(s)
– задание,
– выход объекта, g(s)
– задание,
![]()
![]()
![]()
![]() –
матричные передаточные функции: объекта
по управлению, корректирующего устройства,
регулятора и объекта по возмущению.
–
матричные передаточные функции: объекта
по управлению, корректирующего устройства,
регулятора и объекта по возмущению.
Преобразуем выражение (77):
![]() , (78)
, (78)
где Е – единичная диагональная матрица.
Умножим
обе части (78) слева на
обратную матрицу
![]() :
:

откуда главная матричная передаточная функция замкнутой системы:
![]() ,
,
а матричная передаточная функция по возмущению
![]() .
.
Перекрестные связи в системе управления отсутствуют, если главная матричная передаточная функция и матричная передаточная функция по возмущению диагональные:
![]() ,
,
![]() .
.
Анализ
главной матричной передаточной функции
показывает, что матрица E
– диагональная, а произведение
![]() – недиагональная матрица.
– недиагональная матрица.
Передаточную матрицу регулятора можно выбрать диагональной:
 .
.
Остается
обеспечить условие: произведение
![]() – диагональная матрица, диагональные
элементы которой равны диагональным
элементам матрицы объекта. Это условие
выражает принцип инвариантности, то
есть независимости от перекрестных
связей:
– диагональная матрица, диагональные
элементы которой равны диагональным
элементам матрицы объекта. Это условие
выражает принцип инвариантности, то
есть независимости от перекрестных
связей:
 ,
,
откуда
![]() , (79)
, (79)
тогда
![]() .
.
Таким образом главная матричная передаточная функция и матричная передаточная функция по возмущению диагональные, так как все их элементы – диагональные матрицы:
![]() ,
,
![]() .
.
Выбор передаточной матрицы корректирующего устройства (79) устраняет перекрестные связи в системе управления.
Выбор коэффициентов регулятора kR11 и kR22, обеспечивающих отработку системой задания, осуществим из условия, что при отсутствии возмущений в статике (при t ∞ или s 0) значение на выходе системы у(s) будет равно заданию g(s). Это выполняется, если главная матричная передаточная функция Wз(s) будет единичной и диагональной, т.е.
![]()